CS231n-Lecture5:卷积神经网络(CNN / ConvNets)
卷积神经网络(CNN)
- 为什么要使用卷积?
- CNN的层
- 输入层(INPUT)
- 卷积层(CONV)
- 过滤器(卷积核)—— 特征提取器
- 权值共享
- 激活层(ReLU)
- 池化层 (POOL)—— 降采样
- 全连接层(FC)
- reference
为什么要使用卷积?
卷积的主要目的是为了从输入图像中提取特征。卷积可以通过从输入的一小块数据中学习到图像的特征,并且可以保留像素的空间关系。
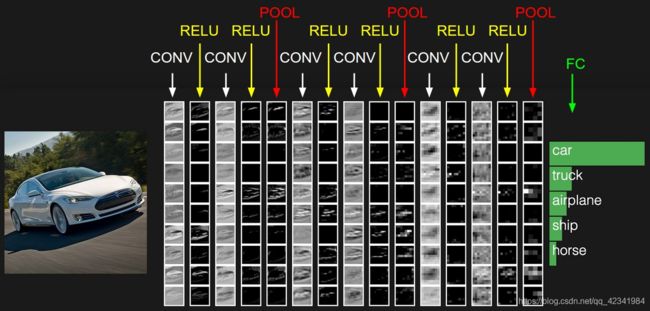
CNN的层
CNN将原始图像从原始像素值逐层转换为最终的类别分数。
CNN网络一共有5个层级结构:
- 输入层(INPUT)
- 卷积层(CONV)
- 激活层(ReLU)
- 池化层(POOL)
- 全连接层(FC)
最常见的ConvNet架构遵循以下模式:
INPUT -> [[CONV -> RELU]*N -> POOL?]*M -> [FC -> RELU]*K -> FC
输入层(INPUT)
- 黑白图像: W × H × 1 W\times H\times 1 W×H×1
- 彩色图像: W × H × 3 W\times H\times 3 W×H×3(R,G,B三个通道)

卷积层(CONV)

过滤器(卷积核)—— 特征提取器
局部感知:
和全连接层不同,卷积层的每个神经元仅连接到输入体的局部区域。区域的范围是一个称为神经元感受野的超参数(即滤波器的大小)。在卷积运算时,会给定一个大小为 F × F F\times F F×F的方阵,该矩阵的大小又称为感受野。过滤器的深度 d d d 和输入层的深度 d d d 维持一致,因此可得到大小为 F × F × d F\times F\times d F×F×d 的过滤器,又叫做卷积核。在实际的操作中,不同的模型会确定不同数量的过滤器(卷积核),其个数记为 K K K。
输入:
输入体大小: W 1 × H 1 × D 1 W_1 \times H_1 \times D_1 W1×H1×D1
超参数:
- 过滤器大小 - F F F
- 过滤器数量 - K K K
- 步幅(stride)- S S S
- 零填充量(zero-padding)- P P P
一定大小的输入体和一定大小的过滤器,再加上一些额外参数,会生成确定大小的输出体:
输出:
输出体大小: W 2 × H 2 × D 2 W_2 \times H_2 \times D_2 W2×H2×D2
则输出矩阵的大小计算公式为:
W 2 = ( W 1 − F + 2 P ) / S + 1 W_2=(W_1 - F + 2P)/S + 1 W2=(W1−F+2P)/S+1
H 2 = ( W 1 − F + 2 P ) / S + 1 H_2=(W_1- F + 2P)/S + 1 H2=(W1−F+2P)/S+1
D 2 = K D_2=K D2=K
举例说明:
W 1 = 5 , H 1 = 5 , D 1 = 3 W_1 = 5, H_1 = 5, D_1 = 3 W1=5,H1=5,D1=3
K = 2 , F = 3 , S = 2 , P = 1 K = 2, F = 3, S = 2, P = 1 K=2,F=3,S=2,P=1
卷积演示-demo
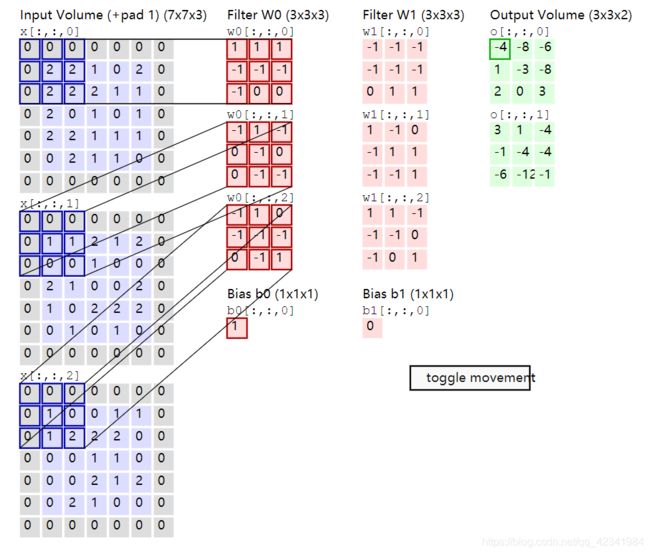
可以看到:
第一个卷积核 W 0 W_0 W0和输入体做卷积得到输出体的第一层,即Feature Map 0( o [ : , : , 0 ] o[:,:,0] o[:,:,0]);
第二个卷积核 W 1 W_1 W1和输入体做卷积得到输出体的第二层,即Feature Map 1( o [ : , : , 1 ] o[:,:,1] o[:,:,1])。
备注:输出的每一个Feature Map有3x3=9个神经元。
每一个卷积核滤波得到的图像就是一类特征的映射,即一个Feature Map。
在卷积神经网络中,一个卷积层可以有多个不同的卷积核(也可以说是滤波器),而每个卷积核在输入图像上滑动且每次只处理一小块图像。这样输入端的卷积层可以提取到图像中最基础的特征,比如不同方向的直线或者拐角;接着再组合成高阶特征,比如三角形、正方形等;再继续抽象组合,得到眼睛、鼻子和嘴等五官;最后再将五官组合成一张脸,完成匹配识别。即每个卷积层提取的特征,在后面的层中都会抽象组合成更高阶的特征。
权值共享
“卷积核”的权值共享只在每个单独通道上有效,即:对输入体的一个通道(即输入体的一个层),对应有一个卷积核的一个通道(层) 去滑动并计算和这个通道每一个部分的卷积。在这个输入体的一个通道中,我们可以说这个权值是共享的。但是,对应于输入体的其他通道,会有卷积核的其他通道(层)去做该通道的感受野特征提取。所以说通道与通道间的对应的卷积核的权值是独立不共享的。
举例说明:
如上图,卷积核 W 0 W_0 W0的通道0在输入体的通道0上要做9次滑动并做9次卷积运算,即在这9次运算过程中,权值是共享的 —— 均为卷积核 W 0 W_0 W0的通道0的那9个权值: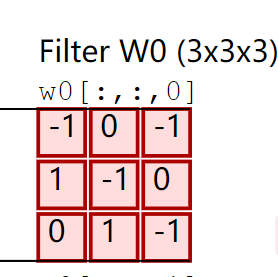
激活层(ReLU)
在神经网络中,对于图像,我们主要采用了卷积的方式来处理,也就是对每个像素点赋予一个权值,这个操作显然就是线性的。但是对于我们样本来说,不一定是线性可分的,为了解决这个问题,我们可以进行线性变化,或者我们引入非线性因素,解决线性模型所不能解决的问题。
激活层实际上是对卷积层的输出结果做一次非线性映射,基本上都是采用了ReLU函数。
池化层 (POOL)—— 降采样
在连续的Conv层之间定期插入一个Pooling层。对输入的特征图进行压缩,逐渐减小表示的空间大小,以减少网络中的参数和计算量,从而也控制过拟合:
- 一方面使特征图变小,简化网络计算复杂度;
- 一方面进行特征压缩,提取主要特征
一般有两种方法:
- Max Pooling:最大池化
- Average Pooling:平均池化
和卷积层类似:
输入:
输入体大小: W 1 × H 1 × D 1 W_1 \times H_1 \times D_1 W1×H1×D1
超参数:
- 过滤器大小 - F F F
- 步幅(stride)- S S S
对于池化层,通常不使用零填充来填充输入。
输出:
输出体大小: W 2 × H 2 × D 2 W_2 \times H_2 \times D_2 W2×H2×D2
则输出矩阵的大小计算公式为:
W 2 = ( W 1 − F ) / S + 1 W_2=(W_1 - F)/S + 1 W2=(W1−F)/S+1
H 2 = ( W 1 − F ) / S + 1 H_2=(W_1- F)/S + 1 H2=(W1−F)/S+1
D 2 = D 1 D_2=D_1 D2=D1
池化层对输入体的每个深度切片独立地进行降采样。
- 左:在此示例中,尺寸为[224x224x64]的输入体与过滤器进行池化,步幅为2,变为尺寸为[112x112x64]的输出体;保留深度。
- 右:最常见的降采样操作是max,即最大池化。此处显示的步幅为2,即,取4个数(不同颜色2x2方阵)中的max。

在实践中,最大池化层只有两种常见变化:
- F = 3 ,S = 2(也称为重叠池)
- F = 2 ,S = 2(更常见)-—— 感受野尺寸过大是不好的。
全连接层(FC)
全连接层在卷积神经网络尾部,两层之间所有神经元都有权重连接(连接所有的特征),将输出值送给分类器(如softmax分类器)得到最终的输出。
reference
[1]深入学习卷积神经网络中卷积层和池化层的意义
[2]为什么要用卷积神经网络?