Linux IIC核心、总线与设备驱动
![]() 总线仅仅使用SCL、SDA这两根信号线就实现了设备之间的数据交互,极大地简化了对硬件资源和PCB版布线空间的占用。因此,
总线仅仅使用SCL、SDA这两根信号线就实现了设备之间的数据交互,极大地简化了对硬件资源和PCB版布线空间的占用。因此,![]() 总线非常广泛的使用在EEPROM、实时钟、小型LCD等与CPU的接口中。Linux系统定义了
总线非常广泛的使用在EEPROM、实时钟、小型LCD等与CPU的接口中。Linux系统定义了![]() 驱动体系结构。在Linux系统中,
驱动体系结构。在Linux系统中,![]() 驱动由 3部分组成,即IIC核心、
驱动由 3部分组成,即IIC核心、![]() 总线和
总线和![]() 设备驱动。这3部分相互协作,形成了非常通用、可适应性很强的
设备驱动。这3部分相互协作,形成了非常通用、可适应性很强的![]() 框架。
框架。
一、Linux ![]() 体系结构
体系结构
Linux的![]() 体系结构分为3个部分:
体系结构分为3个部分:
-
 核心 提供了总线驱动和设备驱动的注册、注销方法,通信方法上层的与具体适配器无关的代码以及探测设备、检测设备地址的上层代码。结构图如下:
核心 提供了总线驱动和设备驱动的注册、注销方法,通信方法上层的与具体适配器无关的代码以及探测设备、检测设备地址的上层代码。结构图如下:
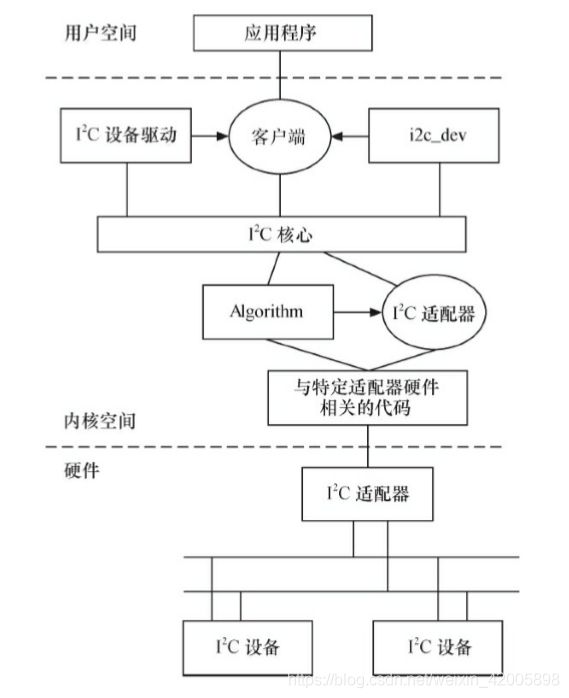
- 总线驱动 是对硬件体系结构中适配器的实现,适配器可由CPU控制,甚至可以直接集成在CPU内部。总线驱动主要包括适配器数据结构体i2c_adapter、适配器的Algorithm数据结构i2c_algorithm和控制适配器产生通信信号的函数。 经由总线驱动的代码,我们可以控制适配器以主控方式产生开始位、停止位、读写周期,以及以从设备方式被读写、产生ACK等。
- 设备驱动 也称客户程序,是对硬件体系结构中设备端的实现,设备一般挂接在受CPU控制的适配器上,通过适配器与CPU交换数据。设备驱动主要包含数据结构i2c_driver和i2c_client,需要更具具体设备实现其中的成员函数。
在Linux内核源代码中的drivers目录下有一个i2c目录,而在i2c目录下又有如下文件和文件夹。
- i2c-core.c 这个文件实现了核心的功能以及/proc/bus/i2c*接口。
- i2c-dev.c 实现了适配器设备文件的功能,每一个适配器被分配一个设备。通过适配器访问设备时的主设备号都为89,次设备号为0~255.应用程序通过“i2c-%d”(i2c-0,i2c-1,...)文件名并使用文件接口open() write() read() ioctl() 和 close() 等来访问这个设备。i2c-dev.c 并不是针对特定的设备而设计的,只是提供了通用的read() write() 和 ioctl() 等接口,应用层可以借用这些接口访问挂在适配器上的设备的存储空间或寄存器,并控制设备的工作方式。
- busses文件夹 这个文件夹包含了一些主机控制器的驱动,如i2c-tegra.c ,i2c-omap.c , i2c-versatile.c , i2c-s3c2410.c 等。
- algos文件夹 实现了一些总线适配器的通信方式。
此外,内核中的i2c.h头文件中对对i2c_adapter、i2c_algorithm、i2c_driver和i2c_client这4个数据结构进行了定义。他们在inxlude/linux/i2c.h文件中。
struct i2c_adapter{
struct module *owner;
unsigned int class;
const struct i2c_algorithm *algo;
void *algo_data;
struct rt_mutix bus_look;
int timeout;
int retries;
struct device dev;
int nr;
char name[48];
struct mutex userspace_clients_lock;
struct list_head usersapce_clients;
struct i2c_bus_recovery_info *bus_recovery_info;
}
struct i2c_algorithm{
int (*master_xfer)(struct i2c_adapter *adap,struct i2c_msg *msgs,int num);
int (*smbus_xfer)(struct i2c_adapter *adap,u16 addr,unsigned short flags,char read_write,u8 command,int size,union i2c_smbus_data *data);
u32 (*functionality)(struct i2c_adapter *);
}
struct i2c_driver{
unsigned int class;
int (*attach_adapter)(struct i2c_adapter *) __deprecated;
int (*probe)(struct i2c_client *,const struct i2c_device_id *);
int (*remove)(struct i2c_client *);
void (*shurtdown)(struct i2c_client *);
int (*suspend)(struct i2c_client *,pm_message_t mesg);
int (*resume)(struct i2c_client *);
void (*alert)(struct i2c_client *,unsigned int data);
int (*command)(struct i2c_client *client,unsigned int cmd,void *arg);
struct device_driver driver;
const struct i2c_device_id *id_table;
int (*detect)(struct i2c_client *,struct i2c_board_info *);
struct list_head clients;
}
struct i2c_client{
unsigned short flags;
unsigned short addr;
char name[I2C_NAME_SIZE];
struct i2c_adapter *adapter;
struct device dev;
int irq;
struct list_head detected;
}下面分析i2c_adapter、i2c_algorithm、i2c_driver和i2c_client这4个数据结构的作用及其盘根错节的关系。
(1)i2c_adapter与i2c_algorithm
i2c_adapter对应与物理上的一个适配器,而i2c_algorithm对应一套通信方法。一个![]() 适配器需要i2c_algorithm提供的通信函数来控制适配器产生特定的访问周期。缺少i2c_algorithm的i2c_adapter什么也做了,因此i2c_adapter中包含所使用的i2c_algorihm的指针。
适配器需要i2c_algorithm提供的通信函数来控制适配器产生特定的访问周期。缺少i2c_algorithm的i2c_adapter什么也做了,因此i2c_adapter中包含所使用的i2c_algorihm的指针。
(2)i2c_driver与i2c_client
i2c_driver对应一套驱动方法,其只要成员函数是probe(),remove(),suspend(),resume()等,另外,struct i2c_device_id形式的id_table是该驱动所支持的![]() 设备的ID表。i2c_client对应与真实的物理设备,每个
设备的ID表。i2c_client对应与真实的物理设备,每个![]() 设备都需要一个i2c_client来描述。i2c_driver与i2c_client的关系是一对多,一个i2c_driver可以支持多个同类型的i2c_client.,i2c_client的信息通常在BSP的板级文件中通过i2c_board_info填充。
设备都需要一个i2c_client来描述。i2c_driver与i2c_client的关系是一对多,一个i2c_driver可以支持多个同类型的i2c_client.,i2c_client的信息通常在BSP的板级文件中通过i2c_board_info填充。
(3)i2c_adapter与i2c_client
i2c_adapter与i2c_client的关系与![]() 硬件系统中适配器和设备的关系一致,即i2c_client依附于i2c_adapter。由于一个适配器可以链接多个
硬件系统中适配器和设备的关系一致,即i2c_client依附于i2c_adapter。由于一个适配器可以链接多个![]() 设备,所有一个i2c_adapter也可以被多个i2c_client依附,i2c_adapter中包含依附于它的i2c_client的链表。
设备,所有一个i2c_adapter也可以被多个i2c_client依附,i2c_adapter中包含依附于它的i2c_client的链表。
假设![]() 总线适配器xxx上有两个使用相同驱动程序的yyy
总线适配器xxx上有两个使用相同驱动程序的yyy![]() 设备,再打开该
设备,再打开该![]() 总线的设备节点后,相关数据结构之间的逻辑组织关系如下图:
总线的设备节点后,相关数据结构之间的逻辑组织关系如下图:
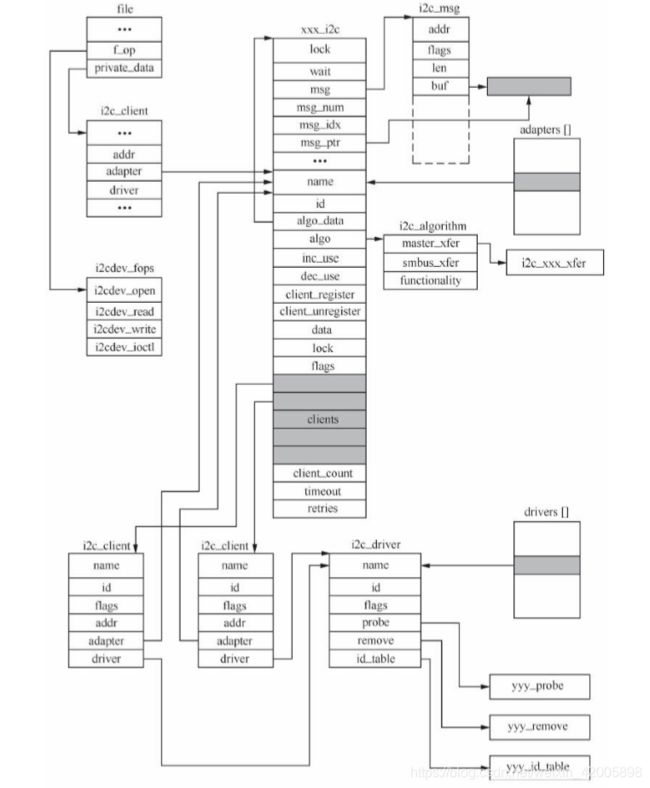
从上图分析可知,虽然![]() 硬件体系结构比较简单,但是
硬件体系结构比较简单,但是![]() 体系结构在Linux中的实现却相当复杂。当工程师拿到实际的电路板时,面对复杂的Linux
体系结构在Linux中的实现却相当复杂。当工程师拿到实际的电路板时,面对复杂的Linux![]() 子系统,应该如何下手写驱动了?究竟哪些是需要亲自做的,那些时内核已经提供得了?理清这个问题,可以使我们在面对具体问题时快速抓住重点。
子系统,应该如何下手写驱动了?究竟哪些是需要亲自做的,那些时内核已经提供得了?理清这个问题,可以使我们在面对具体问题时快速抓住重点。
一方面,适配器驱动可能是Linux内核本身还不包括的;另一方面,挂接在适配器上的具体设备驱动可能是Linux内核还不包括的。因此,工程师要实现的主要工作如下(前两项属于![]() 总线驱动,后两项属于
总线驱动,后两项属于![]() 设备驱动):
设备驱动):
- 提供适配器的硬件驱动,探测、初始化适配器(如申请的I/O地址和中断号)、驱动CPU控制适配器从硬件上产生各种信号以及处理中断等。
- 提供适配器的Algorithm,用具体适配器的xxx_xfer()函数填充i2c_algorithm的master_xfer指针,并把i2c_algorithm指针赋值给i2c_adapter的algo指针。
- 实现设备驱动中的i2c_driver接口,用具体设备yyy的yyy_prob()、yyy_remove()等函数指针和i2c_device_id设备ID表赋值给i2c_driver的probe、remove等指针。
- 实现设备所对应类型的具体驱动,i2c_driver只是实现设备与总线的挂接,而挂接在总线上的设备则千差万别。例如,如果是字符设备,就要实现文件操作接口,即实现具体设备yyy的yyy_read()、yyy_write()和yyy_ioctl()函数等;如果是声卡。就实现ALSA驱动。
二、Linux![]() 核心
核心
![]() 核心(driver/i2c/i2c-core.c)中提供了一组不依赖于硬件平台的接口函数,这个文件一般不需要被工程师修改,但是理解齐整的主要函数非常关键,因为
核心(driver/i2c/i2c-core.c)中提供了一组不依赖于硬件平台的接口函数,这个文件一般不需要被工程师修改,但是理解齐整的主要函数非常关键,因为![]() 总线驱动和设备驱动之间以
总线驱动和设备驱动之间以![]() 核心作为纽带,
核心作为纽带,![]() 核心的主要函数如下:
核心的主要函数如下:
(1)增加/删除i2c_adapter
int i2c_add_adapter(struct i2c_adapter *adap);
void i2c_del_adapter(srtruct i2c_adapter *adap);(2)增减/删除i2c_driver
int i2c_register_driver(struct module *owner,struct i2c_driver *driver);
void i2c_del_driver(struct i2c_driver *driver);
#define i2c_add_driver(driver) i2c_register_driver(THIS_MODULE,driver)(3)![]() 传输、发送和接收
传输、发送和接收
int i2c_transfer(struct i2c_adapter *adap,struct i2c_mags *msgs,int num)
{
int ret;
if(adap->algo->master_xfer){
...
ret = adap->algo->master_xfer(adap,mashs,num);
...
return ret;
}else{
dev_sbg(&adap->dev,"I2C level transfers not supported\n");
return -ENOSYS;
}
}
int i2c_master_send(struct i2c_client *client,const char *buf,int count)
{
int ret;
struct i2c_adapter *adap = client-?adapter;
struct i2c_msg msg;
msg.addr = client->addr;
msg.flags = client->flags&I2C_M_TEH;
msg.len = count;
msg.buf = (char *)buf;
ret = i2c_transfer(adap,&msg,1);
return (ret == 1) count : ret;
}
int i2c_master_recv(struct i2c_client *client,char *buf,int count)
{
struct i2c_adapter *adap = client->adapter;
struct i2c_msg msg;
int ret;
msg.addr = client->addr;
msg.flags = client->flags&I2C_M_TEH;
msg.flags |= I2C_M_RD;
msg.len = count;
msg.buf = buf;
ret = i2c_transfer(adap,&msg,1);
return (ret == 1) count : ret;
}i2c_transfer()函数用于进行![]() 适配器和
适配器和![]() 设备之间的一组消息交互,其中第二个参数是一个指向i2c_msg数组的指针,所以i2c_transfer()一次可以传输多个i2c_msg。而对于时序比较复杂的外设,i2c_master_send()函数和i2c_master_recv()函数内部会调用i2c_transfer()函数分别完成一条写信息和一条读信息。
设备之间的一组消息交互,其中第二个参数是一个指向i2c_msg数组的指针,所以i2c_transfer()一次可以传输多个i2c_msg。而对于时序比较复杂的外设,i2c_master_send()函数和i2c_master_recv()函数内部会调用i2c_transfer()函数分别完成一条写信息和一条读信息。
三、Linux![]() 适配器驱动
适配器驱动
![]() 适配器驱动的注册与注销
适配器驱动的注册与注销
由于![]() 总线控制器通常是在内存上,所以它本身也连接在platfrom总线上,要通过plantfrom_driver和plantfrom_device的匹配来执行。因此尽管
总线控制器通常是在内存上,所以它本身也连接在platfrom总线上,要通过plantfrom_driver和plantfrom_device的匹配来执行。因此尽管![]() 适配器给别人提供了总线,它自己也被认为是接在plantform总线上的一个客户。Linux的总线、设备和驱动模型实际上是一个树形结构,每个节点可能成为别人的总线控制器,但是自己也被认为是从上一级总线枚举出来的。
适配器给别人提供了总线,它自己也被认为是接在plantform总线上的一个客户。Linux的总线、设备和驱动模型实际上是一个树形结构,每个节点可能成为别人的总线控制器,但是自己也被认为是从上一级总线枚举出来的。
通常我们会在![]() 适配器所对应的platfrom_driver的probe()函数中完成两个工作:
适配器所对应的platfrom_driver的probe()函数中完成两个工作:
- 初始化适配器所使用的硬件资源,如申请I/O地址、中断号、时钟等。
- 通过i2c_add_adapter()添加i2c_adapter的数据结构,当然这个i2c_adapter数据结构的成员已经被xxx适配器的相应函数指针锁初始化。
通常我们会在platfrom_driver的remove()函数中完成与加载函数相反的工作:
- 释放适配器所使用的硬件资源,如释放I/O地址、中断号、实钟等。
- 通过i2c_del_adapter()函数删除i2c_adapter的数据结构。
![]() 适配驱动的注册与注销模板
适配驱动的注册与注销模板
static int xxx_i2c_probe(struct platform_device *pdev)
{
struct i2c_adapter *adap;
...
xxx_adapter_hw_init();
adap->dev.parent = %pdev->dev;
adap->dev.of_node = pdev->dev.of_node;
rc = i2c_add_adapter(adap);
...
}
static int xxx_i2c_remove(struct platform_device *pdev)
{
...
xxx_adapter_hw_free();
i2c_del_adapter(&dev->adapter);
return 0;
}
static const struct of_device_id xxx_i2c_of_match[]={
{.compatible = "vendor,xxx-i2c",},
{},
};
MODULE_DEVICE_TABLE(of,xxx_i2c_of_match);
static struct platform_driver xxx_i2c_driver={
.driver = {
.name = "xxx-i2c",
.owner = THIS_MODULE,
.of_match_table = xxx_i2c_of_match,
},
.probe = xxx_i2c_probe,
.remove = xxx_i2c_remove,
};
module_platfrom_driver(xxx_i2c_driver);上述代码中的xxx_adpater_hw_init()和xxx_adpater_hw_free()函数的实现都与具体的CPU和![]() 适配器硬件直接相关。
适配器硬件直接相关。
![]() 总线的通信方法
总线的通信方法
我们需要为特定的![]() 适配器实现通信方法,主要是实现i2c_algorithm的functionality()函数和master_xfer()函数。functionlity()函数非常简单,用于返回algorithm所持有的通信协议,如I2C_FUNC_I2C、I2C_FUNC_10BIT_ADDR、I2C_FUNC_SMBUS_READ_BYTE、I2C_FUNC_SMBUS_WRITE_BYTE等。master_xfer()函数在
适配器实现通信方法,主要是实现i2c_algorithm的functionality()函数和master_xfer()函数。functionlity()函数非常简单,用于返回algorithm所持有的通信协议,如I2C_FUNC_I2C、I2C_FUNC_10BIT_ADDR、I2C_FUNC_SMBUS_READ_BYTE、I2C_FUNC_SMBUS_WRITE_BYTE等。master_xfer()函数在![]() 适配器上完成传递给他的i2c_msg数据中的每个
适配器上完成传递给他的i2c_msg数据中的每个![]() 消息。master_xfer()函数模板如下:
消息。master_xfer()函数模板如下:
static int i2c_adapter_xxx_xfer(struct i2c_adapter *adap,struct i2c_msg *msgs,int num)
{
...
for(i=0;iflags & I2C_M_RD){
i2c_adapter_xxx_setaddr((msg->addr << 1) | 1);
i2c_adapter_xxx_wait_ask();
i2c_adapter_xxx_readbytes(msgs[i]->buf,msgs[i]->len);
}else{
i2c_adapter_xxx_setaddr(msg->addr << 1);
i2c_adapter_xxx_wait_ask();
i2c_adapter_xxx_writebytes(msgs[i]->buf,msgs[i]->len);
}
}
i2c_adapter_xxx_atop();
} 上述代码实际上给出了一个master_xfer()函数处理![]() 消息数组的流程,对于数组中的每个消息,先判断消息类型,若为读信息,则赋值设备地址为(msg->addr<<1)|1 ,否则为msg->addr<<1 。对每个消息产生一个开始位,紧接着传送从设备地址,然后开始数据的发送和接收,且对最后的消息还产生一个停止位。下图为整个master_xfer()完成的时序:
消息数组的流程,对于数组中的每个消息,先判断消息类型,若为读信息,则赋值设备地址为(msg->addr<<1)|1 ,否则为msg->addr<<1 。对每个消息产生一个开始位,紧接着传送从设备地址,然后开始数据的发送和接收,且对最后的消息还产生一个停止位。下图为整个master_xfer()完成的时序:
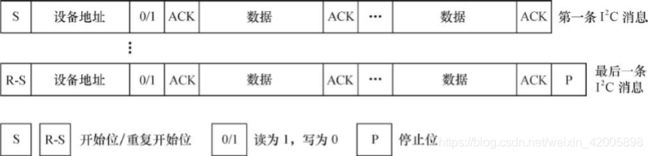
master_xfer()模板中带xxx的函数用于完成适配器的底层硬件操作,与![]() 适配器和CPU的具体硬件直接相关,需要工程师根据芯片的数据手册来实现。
适配器和CPU的具体硬件直接相关,需要工程师根据芯片的数据手册来实现。
i2c_adapter_xxx_readbytes()用于从从设备上接收一串数据,i2c_adapter_xxx_writebytes()用于向从设备写入一串数据,这两个函数的内部也会涉及到![]() 总线协议中的ACK应答。
总线协议中的ACK应答。
master_xfer()函数的实现形式会很多,多数驱动以中断方式来完成这个流程,比如发起硬件请求后,将自己调度出去,因此中间会伴随着睡眠的动作。
多数![]() 总线驱动会定义一个xxx_i2c结构体,作为i2c_adapter的algo_data(类似“私有数据”),其中包含
总线驱动会定义一个xxx_i2c结构体,作为i2c_adapter的algo_data(类似“私有数据”),其中包含![]() 消息数组指针、数组索引及
消息数组指针、数组索引及![]() 适配器Algorithm访问控制用的自旋锁、等待队列等,而master_xfer()函数在完成i2c_msg数组中消息的处理时,也经常访问xxx_i2c结构体的成员以获取寄存器基地址、锁等信息。下面是xxx_i2c结构模板。、
适配器Algorithm访问控制用的自旋锁、等待队列等,而master_xfer()函数在完成i2c_msg数组中消息的处理时,也经常访问xxx_i2c结构体的成员以获取寄存器基地址、锁等信息。下面是xxx_i2c结构模板。、
struct xxx_i2c{
spinlock_t lock;
wait_queue_head_t wait;
struct i2c_msg *msg;
unsigned int msg_num;
unsigned int msg_idx;
unsigned int msg_ptr;
...
struct i2c_adapter adap;
}四、Linux![]() 设备驱动
设备驱动
![]() 设备驱动要使用i2c_driver和i2c_client数据结构并填充i2c_driver中的成员函数。i2c_client一般包括在设备的私有信息结构体yyy_data中,而i2c_driver则适合被定义为全局变量并初始化,下面代码为已经初始化的i2c_driver:
设备驱动要使用i2c_driver和i2c_client数据结构并填充i2c_driver中的成员函数。i2c_client一般包括在设备的私有信息结构体yyy_data中,而i2c_driver则适合被定义为全局变量并初始化,下面代码为已经初始化的i2c_driver:
static struct i2c_driver yyy_driver{
.driver = {
.name = "yyy",
},
.probe = yyy_probe,
.remove = yyy_remove,
.id_table = yyy_id,
} Linux![]() 设备驱动的模块加载与卸载
设备驱动的模块加载与卸载
![]() 设备驱动的模块加载函数通过
设备驱动的模块加载函数通过![]() 核心的i2c_add_driver()API函数添加i2c_driver的工作,而模块卸载函数需要做相反的工作:通过
核心的i2c_add_driver()API函数添加i2c_driver的工作,而模块卸载函数需要做相反的工作:通过![]() 核心的i2c_del_driver()函数删除i2c_driver。模块加载和卸载模板如下:
核心的i2c_del_driver()函数删除i2c_driver。模块加载和卸载模板如下:
static int __init yyy_init(void)
{
return i2c_add_driver(&yyy_driver);
}
module_initcall(yyy_init);
static void __exit yyy_exit(void)
{
i2c_del_driver(&yyy_driver);
}
module_exit(yyy_exit);Linux![]() 设备驱动的数据传输
设备驱动的数据传输
在![]() 设备上读写数据的时序且通常通过i2c_msg数组进行组织,最后通过i2c_transfer()函数完成,
设备上读写数据的时序且通常通过i2c_msg数组进行组织,最后通过i2c_transfer()函数完成,