机器学习系列5-梯度下降法
Gradient Descent
如果本文对你有帮助,请给我的github打个star叭,上面附有全系列目录和内容!
更多优质内容欢迎关注我的微信公众号“Sakura的知识库”:

Review
前面预测宝可梦cp值的例子里,已经初步介绍了Gradient Descent的用法:
In step 3, we have to solve the following optimization problem:
θ ∗ = arg min θ L ( θ ) \theta^{*}=\arg \underset{\theta}{\min} L(\theta) \quad θ∗=argθminL(θ)
L : loss function
θ : \theta: θ: parameters(上标表示第几组参数,下标表示这组参数中的第几个参数)
假设 θ \theta θ是参数的集合:Suppose that θ \theta θ has two variables { θ 1 , θ 2 } \left\{\theta_{1}, \theta_{2}\right\} {θ1,θ2}
随机选取一组起始的参数:Randomly start at θ 0 = [ θ 1 0 θ 2 0 ] \theta^{0}=\left[\begin{array}{l}{\theta_{1}^{0}} \\ {\theta_{2}^{0}}\end{array}\right] \quad θ0=[θ10θ20]
计算 θ \theta θ处的梯度gradient: ∇ L ( θ ) = [ ∂ L ( θ 1 ) / ∂ θ 1 ∂ L ( θ 2 ) / ∂ θ 2 ] \nabla L(\theta)=\left[\begin{array}{l}{\partial L\left(\theta_{1}\right) / \partial \theta_{1}} \\ {\partial L\left(\theta_{2}\right) / \partial \theta_{2}}\end{array}\right] ∇L(θ)=[∂L(θ1)/∂θ1∂L(θ2)/∂θ2]
[ θ 1 1 θ 2 1 ] = [ θ 1 0 θ 2 0 ] − η [ ∂ L ( θ 1 0 ) / ∂ θ 1 ∂ L ( θ 2 0 ) / ∂ θ 2 ] ⇒ θ 1 = θ 0 − η ∇ L ( θ 0 ) \left[\begin{array}{l}{\theta_{1}^{1}} \\ {\theta_{2}^{1}}\end{array}\right]=\left[\begin{array}{l}{\theta_{1}^{0}} \\ {\theta_{2}^{0}}\end{array}\right]-\eta\left[\begin{array}{l}{\partial L\left(\theta_{1}^{0}\right) / \partial \theta_{1}} \\ {\partial L\left(\theta_{2}^{0}\right) / \partial \theta_{2}}\end{array}\right] \Rightarrow \theta^{1}=\theta^{0}-\eta \nabla L\left(\theta^{0}\right) [θ11θ21]=[θ10θ20]−η[∂L(θ10)/∂θ1∂L(θ20)/∂θ2]⇒θ1=θ0−η∇L(θ0)
[ θ 1 2 θ 2 2 ] = [ θ 1 1 θ 2 1 ] − η [ ∂ L ( θ 1 1 ) / ∂ θ 1 ∂ L ( θ 2 1 ) / ∂ θ 2 ] ⇒ θ 2 = θ 1 − η ∇ L ( θ 1 ) \left[\begin{array}{c}{\theta_{1}^{2}} \\ {\theta_{2}^{2}}\end{array}\right]=\left[\begin{array}{c}{\theta_{1}^{1}} \\ {\theta_{2}^{1}}\end{array}\right]-\eta\left[\begin{array}{c}{\partial L\left(\theta_{1}^{1}\right) / \partial \theta_{1}} \\ {\partial L\left(\theta_{2}^{1}\right) / \partial \theta_{2}}\end{array}\right] \Rightarrow \theta^{2}=\theta^{1}-\eta \nabla L\left(\theta^{1}\right) [θ12θ22]=[θ11θ21]−η[∂L(θ11)/∂θ1∂L(θ21)/∂θ2]⇒θ2=θ1−η∇L(θ1)
下图是将gradient descent在投影到二维坐标系中可视化的样子,图上的每一个点都是 ( θ 1 , θ 2 , l o s s ) (\theta_1,\theta_2,loss) (θ1,θ2,loss)在该平面的投影
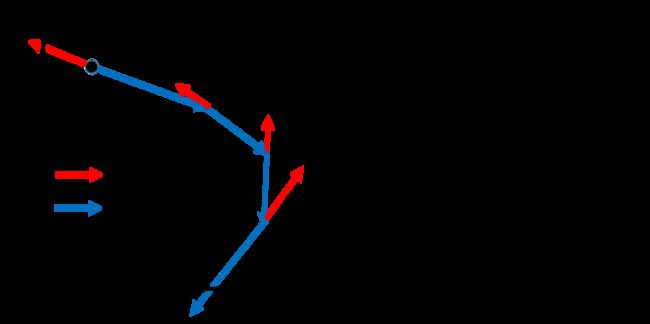
红色箭头是指在 ( θ 1 , θ 2 ) (\theta_1,\theta_2) (θ1,θ2)这点的梯度,梯度方向即箭头方向(从低处指向高处),梯度大小即箭头长度(表示在 θ i \theta^i θi点处最陡的那条切线的导数大小,该方向也是梯度上升最快的方向)
蓝色曲线代表实际情况下参数 θ 1 \theta_1 θ1和 θ 2 \theta_2 θ2的更新过程图,每次更新沿着蓝色箭头方向loss会减小,蓝色箭头方向与红色箭头方向刚好相反,代表着梯度下降的方向
因此,在整个gradient descent的过程中,梯度不一定是递减的(红色箭头的长度可以长短不一),但是沿着梯度下降的方向,函数值loss一定是递减的,且当gradient=0时,loss下降到了局部最小值,总结:梯度下降法指的是函数值loss随梯度下降的方向减小
初始随机在三维坐标系中选取一个点,这个三维坐标系的三个变量分别为 ( θ 1 , θ 2 , l o s s ) (\theta_1,\theta_2,loss) (θ1,θ2,loss),我们的目标是找到最小的那个loss也就是三维坐标系中高度最低的那个点,而gradient梯度可以理解为高度上升最快的那个方向,它的反方向就是梯度下降最快的那个方向,于是每次update沿着梯度反方向,update的步长由梯度大小和learning rate共同决定,当某次update完成后,该点的gradient=0,说明到达了局部最小值
下面是关于gradient descent的一点思考:

Learning rate存在的问题
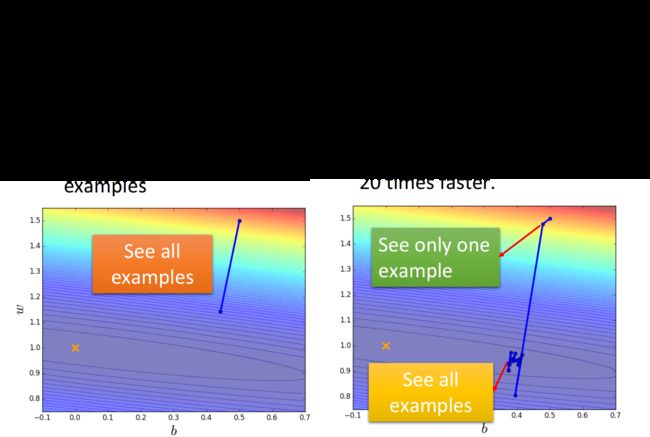
gradient descent过程中,影响结果的一个很关键的因素就是learning rate的大小
- 如果learning rate刚刚好,就可以像下图中红色线段一样顺利地到达到loss的最小值
- 如果learning rate太小的话,像下图中的蓝色线段,虽然最后能够走到local minimal的地方,但是它可能会走得非常慢,以至于你无法接受
- 如果learning rate太大,像下图中的绿色线段,它的步伐太大了,它永远没有办法走到特别低的地方,可能永远在这个“山谷”的口上振荡而无法走下去
- 如果learning rate非常大,就会像下图中的黄色线段,一瞬间就飞出去了,结果会造成update参数以后,loss反而会越来越大(这一点在上次的demo中有体会到,当lr过大的时候,每次更新loss反而会变大)
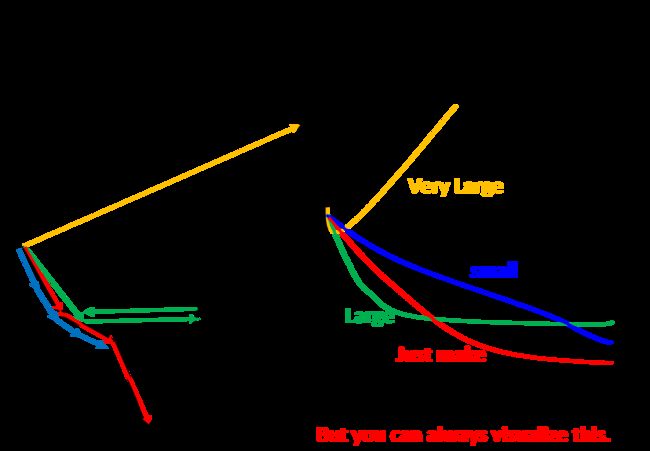
当参数有很多个的时候(>3),其实我们很难做到将loss随每个参数的变化可视化出来(因为最多只能可视化出三维的图像,也就只能可视化三维参数),但是我们可以把update的次数作为唯一的一个参数,将loss随着update的增加而变化的趋势给可视化出来(上图右半部分)
所以做gradient descent一个很重要的事情是,要把不同的learning rate下,loss随update次数的变化曲线给可视化出来,它可以提醒你该如何调整当前的learning rate的大小,直到出现稳定下降的曲线
Adaptive Learning rates
显然这样手动地去调整learning rates很麻烦,因此我们需要有一些自动调整learning rates的方法
最基本、最简单的大原则是:learning rate通常是随着参数的update越来越小的
因为在起始点的时候,通常是离最低点是比较远的,这时候步伐就要跨大一点;而经过几次update以后,会比较靠近目标,这时候就应该减小learning rate,让它能够收敛在最低点的地方
举例:假设到了第t次update,此时 η t = η / t + 1 \eta^t=\eta/ \sqrt{t+1} ηt=η/t+1
这种方法使所有参数以同样的方式同样的learning rate进行update,而最好的状况是每个参数都给他不同的learning rate去update
Adagrad
Divide the learning rate of each parameter by the root mean square(方均根) of its previous derivatives
Adagrad就是将不同参数的learning rate分开考虑的一种算法(adagrad算法update到后面速度会越来越慢,当然这只是adaptive算法中最简单的一种)
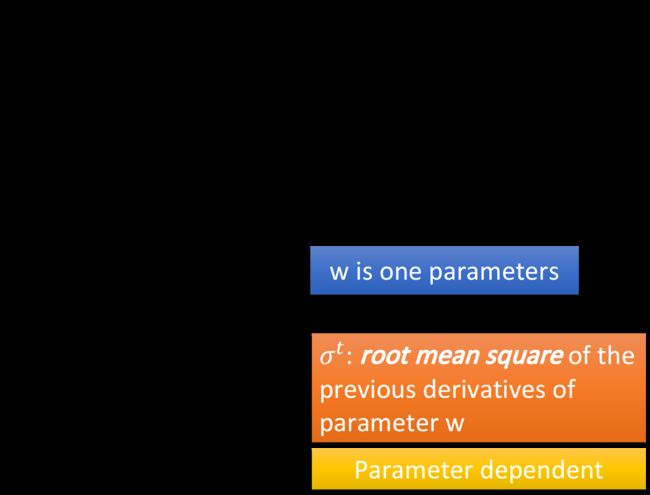
这里的w是function中的某个参数,t表示第t次update, g t g^t gt表示Loss对w的偏微分,而 σ t \sigma^t σt是之前所有Loss对w偏微分的方均根(根号下的平方均值),这个值对每一个参数来说都是不一样的
KaTeX parse error: No such environment: equation at position 8: \begin{̲e̲q̲u̲a̲t̲i̲o̲n̲}̲ \begin{split} …
由于 η t \eta^t ηt和 σ t \sigma^t σt中都有一个 1 1 + t \sqrt{\frac{1}{1+t}} 1+t1的因子,两者相消,即可得到adagrad的最终表达式:
w t + 1 = w t − η ∑ i = 0 t ( g i ) 2 ⋅ g t w^{t+1}=w^t-\frac{\eta}{\sum\limits_{i=0}^t(g^i)^2}\cdot g^t wt+1=wt−i=0∑t(gi)2η⋅gt
Adagrad的contradiction解释
Adagrad的表达式 w t + 1 = w t − η ∑ i = 0 t ( g i ) 2 ⋅ g t w^{t+1}=w^t-\frac{\eta}{\sum\limits_{i=0}^t(g^i)^2}\cdot g^t wt+1=wt−i=0∑t(gi)2η⋅gt里面有一件很矛盾的事情:
我们在做gradient descent的时候,希望的是当梯度值即微分值 g t g^t gt越大的时候(此时斜率越大,还没有接近最低点)更新的步伐要更大一些,但是Adagrad的表达式中,分母表示梯度越大步伐越大,分子却表示梯度越大步伐越小,两者似乎相互矛盾
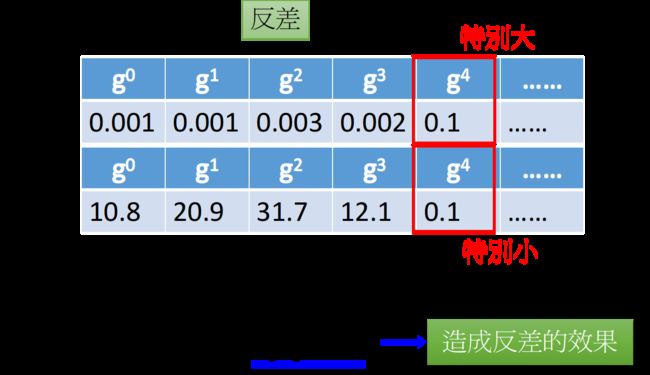
在一些paper里是这样解释的:Adagrad要考虑的是,这个gradient有多surprise,即反差有多大,假设t=4的时候 g 4 g^4 g4与前面的gradient反差特别大,那么 g t g^t gt与 1 t + 1 ∑ i = 0 t ( g i ) 2 \sqrt{\frac{1}{t+1}\sum\limits_{i=0}^t(g^i)^2} t+11i=0∑t(gi)2之间的大小反差就会比较大,它们的商就会把这一反差效果体现出来
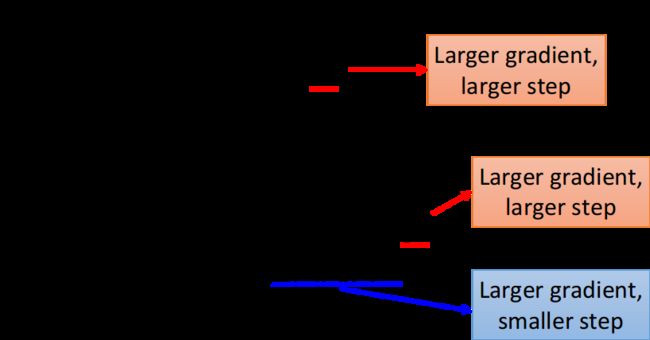
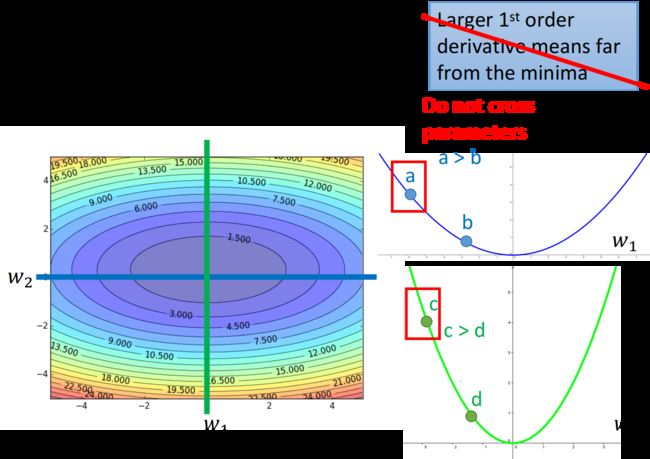
gradient越大,离最低点越远这件事情在有多个参数的情况下是不一定成立的
如下图所示,w1和w2分别是loss function的两个参数,loss的值投影到该平面中以颜色深度表示大小,分别在w2和w1处垂直切一刀(这样就只有另一个参数的gradient会变化),对应的情况为右边的两条曲线,可以看出,比起a点,c点距离最低点更近,但是它的gradient却越大
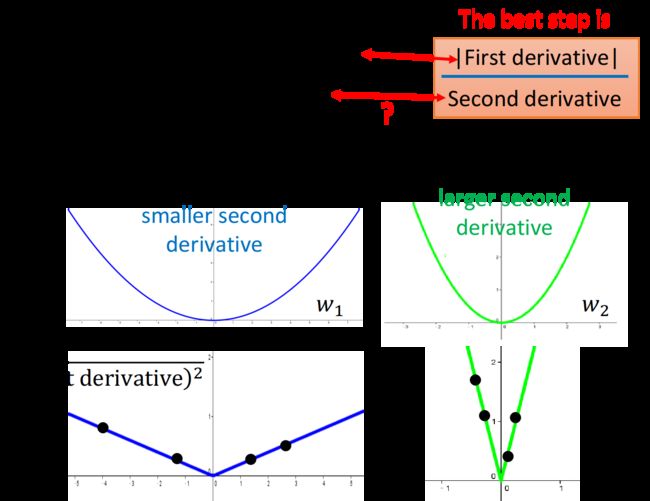
再来回顾Adagrad的表达式: w t + 1 = w t − η ∑ i = 0 t ( g i ) 2 ⋅ g t w^{t+1}=w^t-\frac{\eta}{\sum\limits_{i=0}^t(g^i)^2}\cdot g^t wt+1=wt−i=0∑t(gi)2η⋅gt
g t g^t gt就是一次微分,而分母中的 ∑ i = 0 t ( g i ) 2 \sum\limits_{i=0}^t(g^i)^2 i=0∑t(gi)2反映了二次微分的大小,所以Adagrad想要做的事情就是,在不增加任何额外运算的前提下,想办法去估测二次微分的值
Stochastic Gradicent Descent
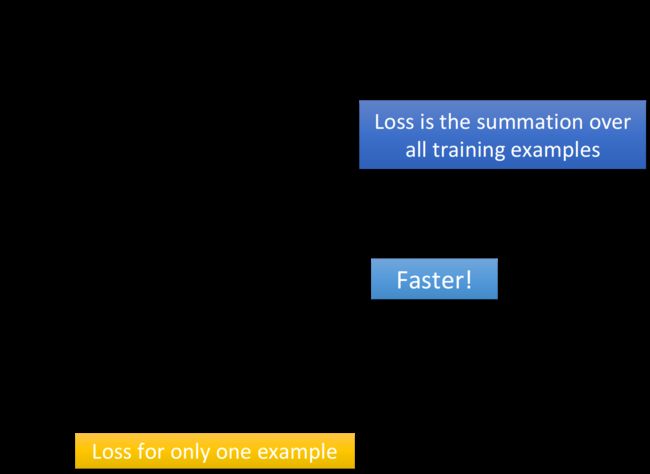
随机梯度下降的方法可以让训练更快速,传统的gradient descent的思路是看完所有的样本点之后再构建loss function,然后去update参数;而stochastic gradient descent的做法是,看到一个样本点就update一次,因此它的loss function不是所有样本点的error平方和,而是这个随机样本点的error平方
Feature Scaling
概念介绍
特征缩放,当多个特征的分布范围很不一样时,最好将这些不同feature的范围缩放成一样
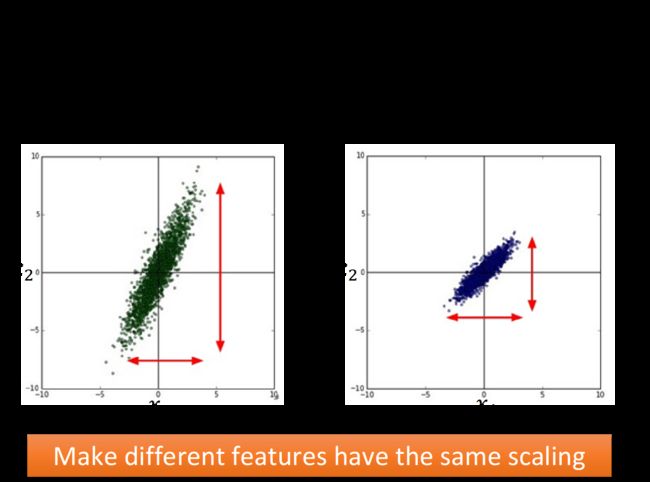
原理解释
y = b + w 1 x 1 + w 2 x 2 y=b+w_1x_1+w_2x_2 y=b+w1x1+w2x2,假设x1的值都是很小的,比如1,2…;x2的值都是很大的,比如100,200…
此时去画出loss的error surface,如果对w1和w2都做一个同样的变动 Δ w \Delta w Δw,那么w1的变化对y的影响是比较小的,而w2的变化对y的影响是比较大的
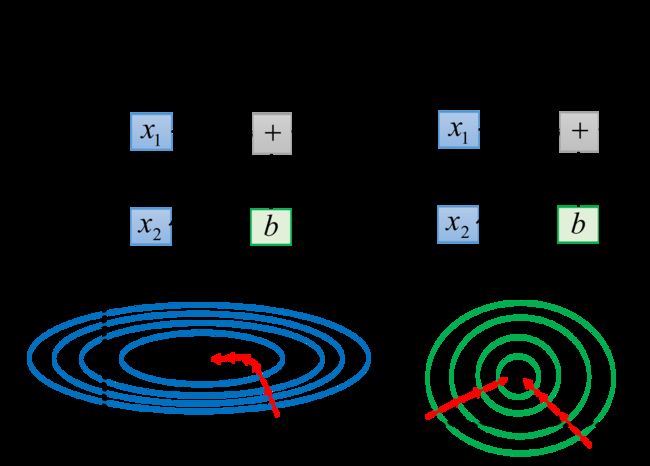
左边的error surface表示,w1对y的影响比较小,所以w1对loss是有比较小的偏微分的,因此在w1的方向上图像是比较平滑的;w2对y的影响比较大,所以w2对loss的影响比较大,因此在w2的方向上图像是比较sharp的
如果x1和x2的值,它们的scale是接近的,那么w1和w2对loss就会有差不多的影响力,loss的图像接近于圆形,那这样做对gradient descent有什么好处呢?
对gradient decent的帮助
之前我们做的demo已经表明了,对于这种长椭圆形的error surface,如果不使用Adagrad之类的方法,是很难搞定它的,因为在像w1和w2这样不同的参数方向上,会需要不同的learning rate,用相同的lr很难达到最低点
如果有scale的话,loss在参数w1、w2平面上的投影就是一个正圆形,update参数会比较容易
而且gradient descent的每次update并不都是向着最低点走的,每次update的方向是顺着等高线的方向(梯度gradient下降的方向),而不是径直走向最低点;但是当经过对input的scale使loss的投影是一个正圆的话,不管在这个区域的哪一个点,它都会向着圆心走。因此feature scaling对参数update的效率是有帮助的
如何做feature scaling
假设有R个example(上标i表示第i个样本点), x 1 , x 2 , x 3 , . . . , x r , . . . x R x^1,x^2,x^3,...,x^r,...x^R x1,x2,x3,...,xr,...xR,每一笔example,它里面都有一组feature(下标j表示该样本点的第j个特征)
对每一个demension i,都去算出它的平均值mean= m i m_i mi,以及标准差standard deviation= σ i \sigma_i σi
对第r个example的第i个component,减掉均值,除以标准差,即 x i r = x i r − m i σ i x_i^r=\frac{x_i^r-m_i}{\sigma_i} xir=σixir−mi
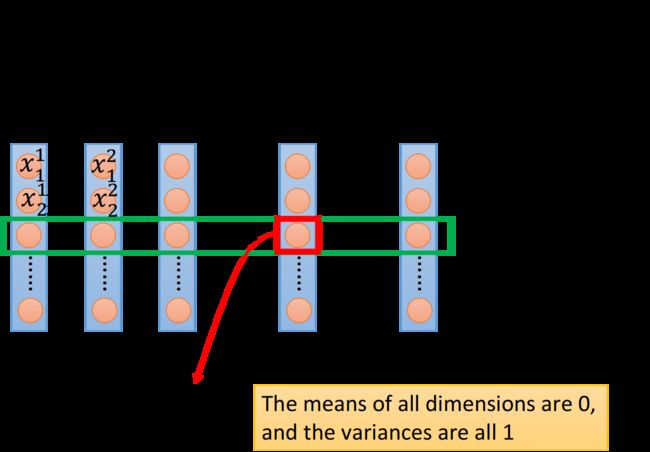
说了那么多,实际上就是将每一个参数都归一化成标准正态分布,即 f ( x i ) = 1 2 π e − x i 2 2 f(x_i)=\frac{1}{\sqrt{2\pi}}e^{-\frac{x_i^2}{2}} f(xi)=2π1e−2xi2,其中 x i x_i xi表示第i个参数
Gradient Descent的理论基础
Taylor Series
泰勒表达式: h ( x ) = ∑ k = 0 ∞ h ( k ) ( x 0 ) k ! ( x − x 0 ) k = h ( x 0 ) + h ′ ( x 0 ) ( x − x 0 ) + h ′ ′ ( x 0 ) 2 ! ( x − x 0 ) 2 + . . . h(x)=\sum\limits_{k=0}^\infty \frac{h^{(k)}(x_0)}{k!}(x-x_0)^k=h(x_0)+h'(x_0)(x-x_0)+\frac{h''(x_0)}{2!}(x-x_0)^2+... h(x)=k=0∑∞k!h(k)(x0)(x−x0)k=h(x0)+h′(x0)(x−x0)+2!h′′(x0)(x−x0)2+...
When x is close to x 0 x_0 x0 : h ( x ) ≈ h ( x 0 ) + h ′ ( x 0 ) ( x − x 0 ) h(x)≈h(x_0)+h'(x_0)(x-x_0) h(x)≈h(x0)+h′(x0)(x−x0)
同理,对于二元函数,when x and y is close to x 0 x_0 x0 and y 0 y_0 y0:
h ( x , y ) ≈ h ( x 0 , y 0 ) + ∂ h ( x 0 , y 0 ) ∂ x ( x − x 0 ) + ∂ h ( x 0 , y 0 ) ∂ y ( y − y 0 ) h(x,y)≈h(x_0,y_0)+\frac{\partial h(x_0,y_0)}{\partial x}(x-x_0)+\frac{\partial h(x_0,y_0)}{\partial y}(y-y_0) h(x,y)≈h(x0,y0)+∂x∂h(x0,y0)(x−x0)+∂y∂h(x0,y0)(y−y0)
从泰勒展开式推导出gradient descent
对于loss图像上的某一个点(a,b),如果我们想要找这个点附近loss最小的点,就可以用泰勒展开的思想
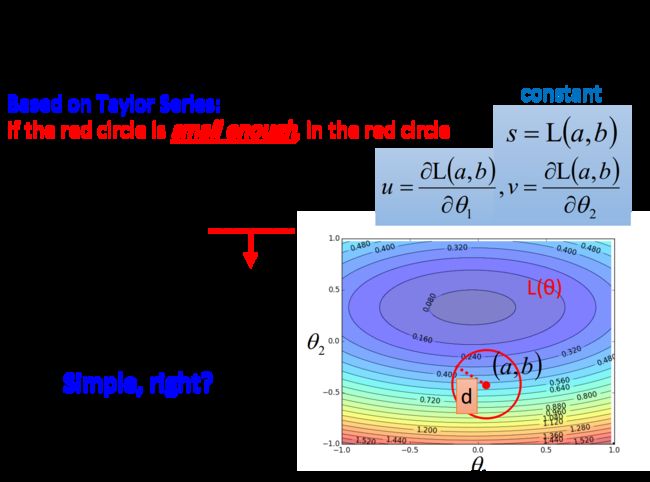
假设用一个red circle限定点的范围,这个圆足够小以满足泰勒展开的精度,那么此时我们的loss function就可以化简为:
L ( θ ) ≈ L ( a , b ) + ∂ L ( a , b ) ∂ θ 1 ( θ 1 − a ) + ∂ L ( a , b ) ∂ θ 2 ( θ 2 − b ) L(\theta)≈L(a,b)+\frac{\partial L(a,b)}{\partial \theta_1}(\theta_1-a)+\frac{\partial L(a,b)}{\partial \theta_2}(\theta_2-b) L(θ)≈L(a,b)+∂θ1∂L(a,b)(θ1−a)+∂θ2∂L(a,b)(θ2−b)
令 s = L ( a , b ) s=L(a,b) s=L(a,b), u = ∂ L ( a , b ) ∂ θ 1 u=\frac{\partial L(a,b)}{\partial \theta_1} u=∂θ1∂L(a,b), v = ∂ L ( a , b ) ∂ θ 2 v=\frac{\partial L(a,b)}{\partial \theta_2} v=∂θ2∂L(a,b)
则 L ( θ ) ≈ s + u ⋅ ( θ 1 − a ) + v ⋅ ( θ 2 − b ) L(\theta)≈s+u\cdot (\theta_1-a)+v\cdot (\theta_2-b) L(θ)≈s+u⋅(θ1−a)+v⋅(θ2−b)
假定red circle的半径为d,则有限制条件: ( θ 1 − a ) 2 + ( θ 2 − b ) 2 ≤ d 2 (\theta_1-a)^2+(\theta_2-b)^2≤d^2 (θ1−a)2+(θ2−b)2≤d2
此时去求 L ( θ ) m i n L(\theta)_{min} L(θ)min,这里有个小技巧,把 L ( θ ) L(\theta) L(θ)转化为两个向量的乘积: u ⋅ ( θ 1 − a ) + v ⋅ ( θ 2 − b ) = ( u , v ) ⋅ ( θ 1 − a , θ 2 − b ) = ( u , v ) ⋅ ( Δ θ 1 , Δ θ 2 ) u\cdot (\theta_1-a)+v\cdot (\theta_2-b)=(u,v)\cdot (\theta_1-a,\theta_2-b)=(u,v)\cdot (\Delta \theta_1,\Delta \theta_2) u⋅(θ1−a)+v⋅(θ2−b)=(u,v)⋅(θ1−a,θ2−b)=(u,v)⋅(Δθ1,Δθ2)
观察图形可知,当向量 ( θ 1 − a , θ 2 − b ) (\theta_1-a,\theta_2-b) (θ1−a,θ2−b)与向量 ( u , v ) (u,v) (u,v)反向,且刚好到达red circle的边缘时(用 η \eta η去控制向量的长度), L ( θ ) L(\theta) L(θ)最小
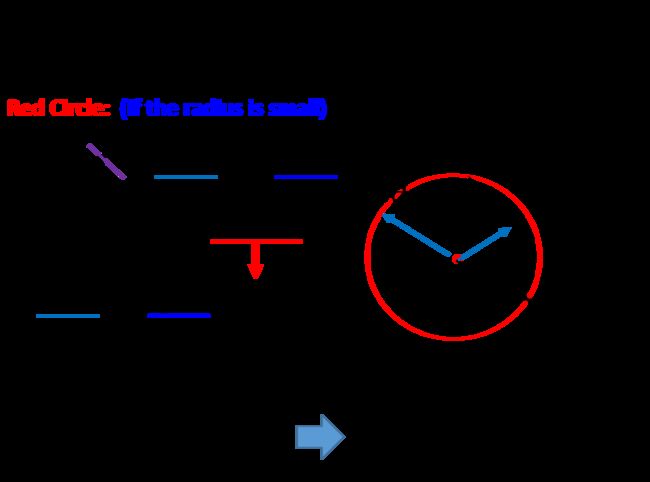
( θ 1 − a , θ 2 − b ) (\theta_1-a,\theta_2-b) (θ1−a,θ2−b)实际上就是 ( Δ θ 1 , Δ θ 2 ) (\Delta \theta_1,\Delta \theta_2) (Δθ1,Δθ2),于是 L ( θ ) L(\theta) L(θ)局部最小值对应的参数为中心点减去gradient的加权
[ Δ θ 1 Δ θ 2 ] = − η [ u v ] = > [ θ 1 θ 2 ] = [ a b ] − η [ u v ] = [ a b ] − η [ ∂ L ( a , b ) ∂ θ 1 ∂ L ( a , b ) ∂ θ 2 ] \begin{bmatrix} \Delta \theta_1 \\ \Delta \theta_2 \end{bmatrix}= -\eta \begin{bmatrix} u \\ v \end{bmatrix}=> \begin{bmatrix} \theta_1 \\ \theta_2 \end{bmatrix}= \begin{bmatrix} a\\ b \end{bmatrix}-\eta \begin{bmatrix} u\\ v \end{bmatrix}= \begin{bmatrix} a\\ b \end{bmatrix}-\eta \begin{bmatrix} \frac{\partial L(a,b)}{\partial \theta_1}\\ \frac{\partial L(a,b)}{\partial \theta_2} \end{bmatrix} [Δθ1Δθ2]=−η[uv]=>[θ1θ2]=[ab]−η[uv]=[ab]−η[∂θ1∂L(a,b)∂θ2∂L(a,b)]
这就是gradient descent在数学上的推导,注意它的重要前提是,给定的那个红色圈圈的范围要足够小,这样泰勒展开给我们的近似才会更精确,而 η \eta η的值是与圆的半径成正比的,因此理论上learning rate要无穷小才能够保证每次gradient descent在update参数之后的loss会越来越小,于是当learning rate没有设置好,泰勒近似不成立,就有可能使gradient descent过程中的loss没有越来越小
当然泰勒展开可以使用二阶、三阶乃至更高阶的展开,但这样会使得运算量大大增加,反而降低了运行效率
Gradient Descent的限制
之前已经讨论过,gradient descent有一个问题是它会停在local minima的地方就停止update了
事实上还有一个问题是,微分值是0的地方并不是只有local minima,settle point的微分值也是0
以上都是理论上的探讨,到了实践的时候,其实当gradient的值接近于0的时候,我们就已经把它停下来了,但是微分值很小,不见得就是很接近local minima,也有可能像下图一样在一个高原的地方
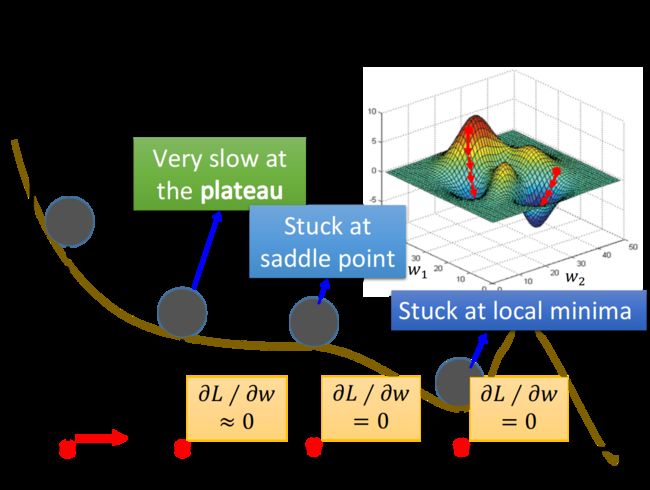
综上,gradient descent的限制是,它在gradient即微分值接近于0的地方就会停下来,而这个地方不一定是global minima,它可能是local minima,可能是saddle point鞍点,甚至可能是一个loss很高的plateau平缓高原
