cartographer LocalTrajectoryBuilder2D
1. 所处:
LocalTrajectoryBuilder2D cartographer/mapping/internal/2d/local_trajectory_build_2d.cc /.h中
LocalTrajectoryBuilder2D 类在 map_build.cc 中 AddTrajectoryBuilder 函数中被构造
2. 主要函数:
函数一、AddRangeData
std::unique_ptr AddRangeData(
const std::string& sensor_id,
const sensor::TimedPointCloudData& range_data); 具体分析:
1.同步不同传感器的点云数据,得到 较好的点云数据 该点云数据的坐标为 tracking
range_data_collator_.AddRangeData(sensor_id, unsynchronized_data)2. 不是用IMU时 初始化外推器
3.将点云数据带上时间,同时将点云数据用重力修正。
4.将点云数据按照 配置的范围选取 最终获得 重力对齐范围数据
5.调用下面函数 AddAccumulatedRangeData函数
函数二、AddAccumulatedRangeData
std::unique_ptr AddAccumulatedRangeData(
common::Time time, const sensor::RangeData& gravity_aligned_range_data,
const transform::Rigid3d& gravity_alignment); 1. 姿态预测(transform::Rigid2d ) 非重力对齐姿势预测 * 重力对齐的逆(gravity_alignment.inverse())
const transform::Rigid2d pose_prediction = transform::Project2D(
non_gravity_aligned_pose_prediction * gravity_alignment.inverse());
2. 对激光雷达数据进行滤波 & 转换成点云数据 这里的点云数据是在平面机器人坐标系中
const sensor::PointCloud& filtered_gravity_aligned_point_cloud =
sensor::AdaptiveVoxelFilter(options_.adaptive_voxel_filter_options())
.Filter(gravity_aligned_range_data.returns);3.调用匹配函数 ScanMatch 函数,激光匹配后得到较准确的 pose_estimate的位姿。(匹配是跟活跃子图匹配)
4.pose_estimate转化为 Rigid3d 反重力对齐。
const transform::Rigid3d pose_estimate =
transform::Embed3D(*pose_estimate_2d) * gravity_alignment;5.将激光数据转化为 local_trajectory 坐标系下
sensor::RangeData range_data_in_local =
TransformRangeData(gravity_aligned_range_data,
transform::Embed3D(pose_estimate_2d->cast())); 6.插入子图,InsertIntoSubmap 函数。插入子图的激光数据的坐标系为local_trajectory
std::unique_ptr insertion_result = InsertIntoSubmap(
time, range_data_in_local, filtered_gravity_aligned_point_cloud,
pose_estimate, gravity_alignment.rotation()); 7.返回匹配结果,MatchingResult结构体。
函数三、ScanMatch
std::unique_ptr ScanMatch(
common::Time time, const transform::Rigid2d& pose_prediction,
const sensor::RangeData& gravity_aligned_range_data); 1.活跃子图为空时,返回当前估计位姿的指针
if (active_submaps_.submaps().empty()) {
return absl::make_unique(pose_prediction);
} 2.匹配的子图为当前活跃子图的第一个子图
3. 配置文件中是否需要用csm来优化ceres-scan-match的初始解
const double score = real_time_correlative_scan_matcher_.Match(
pose_prediction, filtered_gravity_aligned_point_cloud,
*static_cast(matching_submap->grid()),
&initial_ceres_pose);
kRealTimeCorrelativeScanMatcherScoreMetric->Observe(score); 通过csm和滤波器过后的2d平面的 激光雷达数据来进行位姿优化传入预测的初始位姿\激光雷达数据\栅格地图
返回一个更好的值initial_ceres_pose
4. 最终通过ceres_scan_match来得到最终的位姿
ceres::Solver::Summary summary;
ceres_scan_matcher_.Match(pose_prediction.translation(), initial_ceres_pose,
filtered_gravity_aligned_point_cloud,
*matching_submap->grid(), pose_observation.get(),
&summary);5.如果扫描获得位姿,则跟新当前时刻的状态,
if (pose_observation) {
kCeresScanMatcherCostMetric->Observe(summary.final_cost);
const double residual_distance =
(pose_observation->translation() - pose_prediction.translation())
.norm();
kScanMatcherResidualDistanceMetric->Observe(residual_distance);
const double residual_angle =
std::abs(pose_observation->rotation().angle() -
pose_prediction.rotation().angle());
kScanMatcherResidualAngleMetric->Observe(residual_angle);
}6.返回 pose_observation
函数四、InsertIntoSubmap
std::unique_ptr InsertIntoSubmap(
common::Time time, const sensor::RangeData& range_data_in_local,
const sensor::RangeData& gravity_aligned_range_data,
const transform::Rigid3d& pose_estimate,
const Eigen::Quaterniond& gravity_alignment); 1.如果累积的运动(线性,旋转或时间)高于 threshold(阈值),返回false。 否则,相对运动被累积并且返回true。
if (num_total_ > 1 &&
time - last_time_ <= common::FromSeconds(options_.max_time_seconds()) &&
(pose.translation() - last_pose_.translation()).norm() <=
options_.max_distance_meters() &&
transform::GetAngle(pose.inverse() * last_pose_) <=
options_.max_angle_radians()) {
return true;
}2.如果是true return nullptr;
if (motion_filter_.IsSimilar(time, pose_estimate)) {
return nullptr;
}3.在调用InsertRangeData(range_data_in_local)之前必须在此处查询活动子图,因为查询的值对下次插入有效。
4.过滤重力对齐点云数据。
5.返回 InsertionResult 类指针。
3. cartographer 前端 相关性扫描匹配 和 ceres 优化两种
1.相关性扫描匹配:
double RealTimeCorrelativeScanMatcher2D::Match(
const transform::Rigid2d& initial_pose_estimate,
const sensor::PointCloud& point_cloud, const Grid2D& grid,
transform::Rigid2d* pose_estimate)1.1 输入 :
- 预计位姿(推算位子)
- 点云数据
- 概率栅格地图
- 估计位姿(引用输出)
返回: 最佳得分
1.2 步骤:
- // 初始位姿的角度
- /将激光转到初始位姿的角度 (x,y)0 点云开始为:baselink坐标系
- //确定查询窗口
- //得到旋转的点云 查询角度范围 ×2 /角度分辨率 点云 对各个角度旋转
- //将点云转到当前位姿下 平移
- /生成平移的候选值, 只记录 x,y的偏移,未进行 实际点云平移
- //求取得分 遍历候选值, 再遍历激光点,遍历激光点时将xy的偏移量传入
- //取得分最大的候选值的 偏移量
- //输入的初始位子 + 偏移量
2.ceres 优化:
void CeresScanMatcher2D::Match(const Eigen::Vector2d& target_translation,
const transform::Rigid2d& initial_pose_estimate,
const sensor::PointCloud& point_cloud,
const Grid2D& grid,
transform::Rigid2d* const pose_estimate,
ceres::Solver::Summary* const summary) 2.1 输入 :
- 预计位姿(推算位子)
- scanMatch匹配后位姿
- 点云数据
- 概率栅格地图
- 优化后位姿(输出引用)
- ceres 优化器
2.2 步骤:
- 构建观测残差
- 构建平移变化量残差
- 构建旋转变化量残差
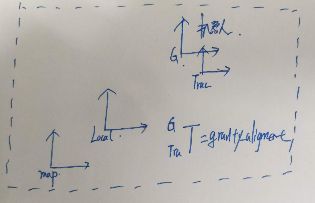
3.输入数据的坐标关系

返回: 最佳得分
预计位姿 点云数据 在重力坐标系下