基于迅为4412精英版连接SIM7100C模块Android下调试——RIL库分析(二)
前言:
为了方便查看博客,特意申请了一个公众号,附上二维码,有兴趣的朋友可以关注,和我一起讨论学习,一起享受技术,一起成长。

1.Android电话系统设计框架图:
Android的智能机架构是应用处理器+基带芯片,也就是AP+Modem的模式,AP部分相当于CPU,Modem相当于网卡,而且每个厂商使用的Modem都有可能不一样,故Android 开发者使用的Modem 是不一样的,各种指令格式,初始化序列都可能不一样,所以为了消除这些差别,Android 设计者将ril 做了一个抽象,使用一个虚拟电话的概念,不同modem相关的AT指令或者通信协议编译成相应的动态链接库.so文件,Rild 是具体的AT 指令合成者和应答解析者。
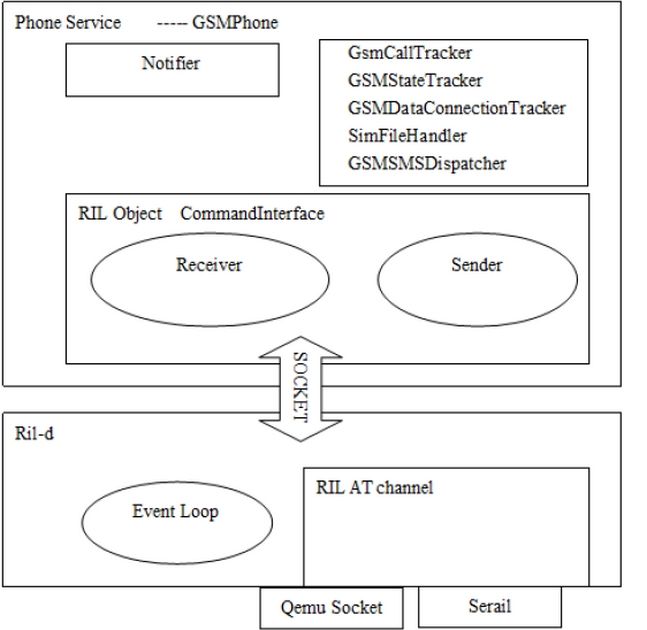
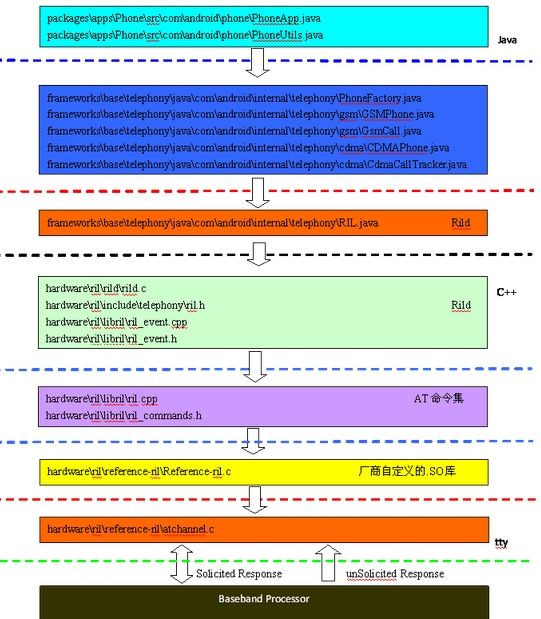
Android电话系统代码结构:
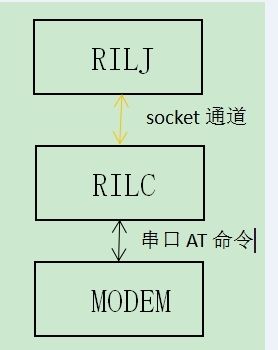
2.互相之间的通信
RILC与上层的RILJ沟通方式是通过Socket传输数据与命令,而与底层Modem的信号传输是通过串口用AT命令来实现。
3.ril-daemon的启动
ril-daemon进程是由init进程在系统开机时负责启动的,该进程在我们系统启动之后就一直存在在系统里面了。
在init.rc(…/out/target/product/sabresd_6dq/root/init.rc对应源码 …/system/core/rootdir/init.rc)中可以看到如下代码:

ril-daemon守护进程指的是system/bin/下的可执行程序rild,而rild是由…/hardware/ril/rild/目录下的rild.c文件编译生成的。
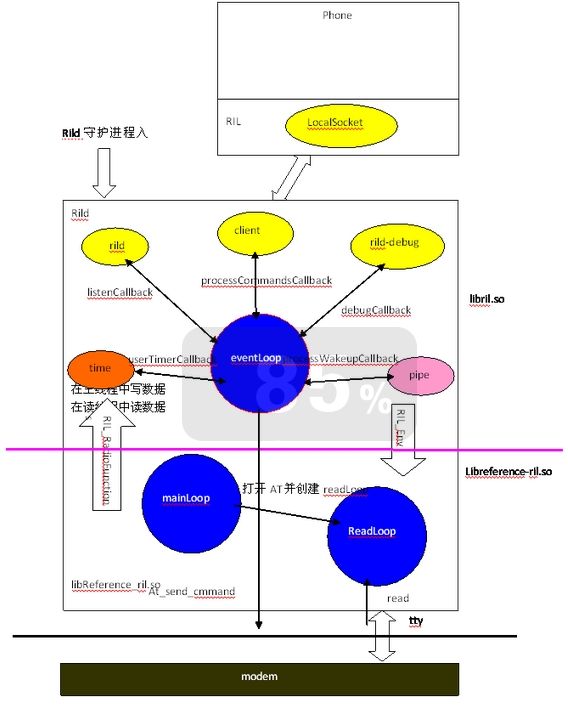
4.RILD框架设计
5.rild启动流程分析
1.rild(hardware/ril/rild/rild.c):仅实现main函数作为整个ril层的入口点,负责完成初始化。
2.libril.so(hardware/ril/libril/*):与rild结合相当紧密,是其共享库,编译时就已经建立了这一关系.libril.so驻留在rild这一守护进程中,主要完成同上层通信的工作,接受ril请求并传递给libreference-ril.so,同时把libreference-ril.so的反馈传给调用进程。
3.libreference-ril.so(hardware/ril/libreference-ril/*):rild通过dlopen方式加载,主要负责跟Modem硬件通信。它转换来自librild.so的请求为AT命令,通过串口连接radio,那么参数为这种形式:-d /dev/ttySx(ttyUSB**),同时监控Modem的反馈信息,并传递回libril.so。在初始化时,rild通过符号RIL_Init获取一组函数指针并以此与之建立联系。
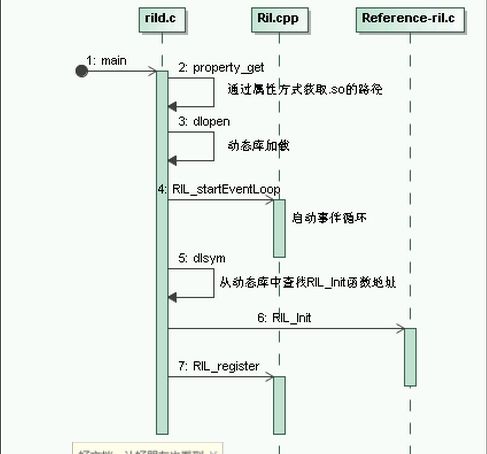
RILD进程启动的时序图:
6.rild.c 代码分析
#include [-- ]\n" , argv0);
exit(-1);
}
extern void RIL_register (const RIL_RadioFunctions *callbacks);
extern void RIL_onRequestComplete(RIL_Token t, RIL_Errno e,
void *response, size_t responselen);
extern void RIL_onUnsolicitedResponse(int unsolResponse, const void *data,
size_t datalen);
extern void RIL_requestTimedCallback (RIL_TimedCallback callback,
void *param, const struct timeval *relativeTime);
static struct RIL_Env s_rilEnv = {
RIL_onRequestComplete,
RIL_onUnsolicitedResponse,
RIL_requestTimedCallback
};
extern void RIL_startEventLoop();
static int make_argv(char * args, char ** argv)
{
// Note: reserve argv[0]
int count = 1;
char * tok;
char * s = args;
while ((tok = strtok(s, " \0"))) {
argv[count] = tok;
s = NULL;
count++;
}
return count;
}
/*
* switchUser - Switches UID to radio, preserving CAP_NET_ADMIN capabilities.
* Our group, cache, was set by init.
//切换UID为AID_RADIO
*/
void switchUser() {
prctl(PR_SET_KEEPCAPS, 1, 0, 0, 0);
setuid(AID_RADIO);
struct __user_cap_header_struct header;
struct __user_cap_data_struct cap;
header.version = _LINUX_CAPABILITY_VERSION;
header.pid = 0;
cap.effective = cap.permitted = (1 << CAP_NET_ADMIN) | (1 << CAP_NET_RAW);
cap.inheritable = 0;
capset(&header, &cap);
}
/*rild.c仅实现一main函数作为整个ril层的入口点,负责完成初始化*/
int main(int argc, char **argv)
{
const char * rilLibPath = NULL;
char **rilArgv;
void *dlHandle;
const RIL_RadioFunctions *(*rilInit)(const struct RIL_Env *, int, char **);
const RIL_RadioFunctions *funcs;
char libPath[PROPERTY_VALUE_MAX];
unsigned char hasLibArgs = 0;
int i;
umask(S_IRGRP | S_IWGRP | S_IXGRP | S_IROTH | S_IWOTH | S_IXOTH);
for (i = 1; i < argc ;) {
if (0 == strcmp(argv[i], "-l") && (argc - i > 1)) {
rilLibPath = argv[i + 1];
i += 2;
} else if (0 == strcmp(argv[i], "--")) {
i++;
hasLibArgs = 1;
break;
} else {
usage(argv[0]);
}
}
if (rilLibPath == NULL) {
if ( 0 == property_get(LIB_PATH_PROPERTY, libPath, NULL)) {
// No lib sepcified on the command line, and nothing set in props.
// Assume "no-ril" case.
goto done;
} else {
rilLibPath = libPath;
}
}
/* special override when in the emulator */
/*判断是否为模拟器 */
#if 1
{
static char* arg_overrides[3];
static char arg_device[32];
int done = 0;
#define REFERENCE_RIL_PATH "/system/lib/libreference-ril.so"
/* first, read /proc/cmdline into memory */
char buffer[1024], *p, *q;
int len;
int fd = open("/proc/cmdline",O_RDONLY);
if (fd < 0) {
RLOGD("could not open /proc/cmdline:%s", strerror(errno));
goto OpenLib;
}
/*读取/proc/cmdline文件中的内容*/
do {
len = read(fd,buffer,sizeof(buffer)); }
while (len == -1 && errno == EINTR);
if (len < 0) {
RLOGD("could not read /proc/cmdline:%s", strerror(errno));
close(fd);
goto OpenLib;
}
close(fd);
/*判断是否为模拟器,对于真机,此处条件为false */
if (strstr(buffer, "android.qemud=") != NULL)
{
/* the qemud daemon is launched after rild, so
* give it some time to create its GSM socket
*/
int tries = 5;
#define QEMUD_SOCKET_NAME "qemud"
while (1) {
int fd;
sleep(1);
fd = qemu_pipe_open("qemud:gsm");
if (fd < 0) {
fd = socket_local_client(
QEMUD_SOCKET_NAME,
ANDROID_SOCKET_NAMESPACE_RESERVED,
SOCK_STREAM );
}
if (fd >= 0) {
close(fd);
snprintf( arg_device, sizeof(arg_device), "%s/%s",
ANDROID_SOCKET_DIR, QEMUD_SOCKET_NAME );
arg_overrides[1] = "-s";
arg_overrides[2] = arg_device;
done = 1;
break;
}
RLOGD("could not connect to %s socket: %s",
QEMUD_SOCKET_NAME, strerror(errno));
if (--tries == 0)
break;
}
if (!done) {
RLOGE("could not connect to %s socket (giving up): %s",
QEMUD_SOCKET_NAME, strerror(errno));
while(1)
sleep(0x00ffffff);
}
}
/* otherwise, try to see if we passed a device name from the kernel */
if (!done) do {
#define KERNEL_OPTION "android.ril="
#define DEV_PREFIX "/dev/"
/*判断/proc/cmdline中的内容是否包含"android.ril=" */
p = strstr( buffer, KERNEL_OPTION );
if (p == NULL)
break;
p += sizeof(KERNEL_OPTION)-1;
q = strpbrk( p, " \t\n\r" );
if (q != NULL)
*q = 0;
snprintf( arg_device, sizeof(arg_device), DEV_PREFIX "%s", p );
arg_device[sizeof(arg_device)-1] = 0;
arg_overrides[1] = "-d";
arg_overrides[2] = arg_device;
done = 1;
} while (0);
if (done) {
argv = arg_overrides;
argc = 3;
i = 1;
hasLibArgs = 1;
rilLibPath = REFERENCE_RIL_PATH; //连接库地址:/system/lib/libreference-ril.so
RLOGD("overriding with %s %s", arg_overrides[1], arg_overrides[2]);
}
}
OpenLib:
#endif
/* 动态库装载 */
// switchUser(); /*设置Rild进程的组用户为radio */
/**********************************************************************************
打开链接库,librefrence -ril.so(厂商自定义的库 ),从中取出并执行RIL_Init函数,
得到RIL_RadioFunctions指针,通过RIL_register()函数注册到libril.so库中
***********************************************************************************/
dlHandle = dlopen(rilLibPath, RTLD_NOW);
if (dlHandle == NULL) {
RLOGE("dlopen failed: %s", dlerror());
exit(-1);
}
/*************************************************************************************************
*RIL_startEventLoop():第一个任务
开启EventLoop循环,调用 ril.cpp 中的 RIL_startEventLoop 函数,libril.so 开始循环监听 socket 事件。
**************************************************************************************************/
RIL_startEventLoop();
/*************************************************************************************************
*第二个任务:RIL_Init
*硬件访问
从链接库中(也就是reference-ril.c)寻找RIL_Init函数地址,强制转换为RIL_RadioFunctions的函数指针
RIL_Init首先通过参数获取硬件接口的设备文件或模拟硬件接口的socket. 接下来便新开一个线程继续初始化, 即mainLoop
*****************************************************************************************************/
rilInit = (const RIL_RadioFunctions *(*)(const struct RIL_Env *, int, char **))dlsym(dlHandle, "RIL_Init");
if (rilInit == NULL) {
RLOGE("RIL_Init not defined or exported in %s\n", rilLibPath);
exit(-1);
}
if (hasLibArgs) {
rilArgv = argv + i - 1;
argc = argc -i + 1;
} else {
static char * newArgv[MAX_LIB_ARGS];
static char args[PROPERTY_VALUE_MAX];
rilArgv = newArgv;
property_get(LIB_ARGS_PROPERTY, args, "");/*过属性系统获取参数:rild.libargs*/
argc = make_argv(args, rilArgv);
}
// Make sure there's a reasonable argv[0]
rilArgv[0] = argv[0];
/**************************************************************************************
调用reference-ril.c中的RIL_Init函数进行初始化INIT,同时得到reference-ril的回调函数
调用RIL_Init函数来初始化rild,传入参数s_rilEnv,返回RIL_RadioFunctions地址
**************************************************************************************/
funcs = rilInit(&s_rilEnv, argc, rilArgv);
/*******************************************************************************************
注册得到的reference的回调函数
rild通过RIL_register注册这一(onRequest)指针。
RIL_register中要完成的另外一个任务,就是打开前面提到的跟上层通信的socket接口
(s_fdListen是主接口,s_fdDebug供调试时使用)。
*******************************************************************************************/
RIL_register(funcs);
done:
while(1) {
// sleep(UINT32_MAX) seems to return immediately on bionic
sleep(0x00ffffff);
}
}
主入口:rild.c中的main函数,主要完成三个任务: