斯坦福大学深度学习公开课cs231n学习笔记(8)神经网络学习过程中的检查事项和参数调优
在这节课中,主要讲述了神经网络的检查事项(例如梯度检查,合理性检查和学习过程中对损失函数、权重、每层的激活函数与梯度分布等的检查等)和神经网络的参数调优实现方法(例如:随机梯度下降方法,动量方法,学习率退火方法等等)
-----------第一部分:检查事项----------
梯度检查:
 (1)
(1) (2)
(2)另外,在进行误差比较时,应该使用下面的相对误差比较法:
 (3)
(3)
公式3比较误差时是计算的两者的差值占两个梯度绝对值较大值(分母取的是两个梯度绝对值的最大值)的比例,分母也可以是两个梯度绝对值的和。这样做可以防止当其中一个梯度等于0时,分母为0的情况(这种情况在ReLU中经常发生),所以还需要注意当两个梯度都为零时并且通过了梯度检查的情况。老师给出了在实践中的几种情形:
- 相对误差>1e-2,通常意味着梯度可能出错了。
- 1e-2>相对误差>1e-4,这个结果也不是很好。
- 相对误差<1e-4,这个结果对于含有不可导点的目标函数是可以的;但如果目标函数不存在kink(例如使用tanh和softmax),那么相对误差还是有点大。
- 相对误差<1e-7,或者更小,表示这是好的结果。
在多层神经网络中,误差时逐层累积的。对于一个可微分函数,如果误差为1e-2,通常就是梯度计算出错了。
另外,梯度检查时所用的数值精度也会影响到结果,例如,可能出现使用单精度数的相对误差为1e-2,但使用双精度数时的相对误差为1e-8的情况。 还需要注意保持浮点数的有效范围,在论文《What Every Computer Scientist Should Konw About Floating-Point Artthmetic》描述了多种可能因为浮点数值计算导致的错误。老师建议将原始的解析梯度和数值梯度数据打印出来,以确保用来比较的数值不要太小(通常绝对值小于1e-10是很坏的情况)。但是如果出现确实过小的情形,可以借助一个常数将损失函数的数值范围暂时扩展到一个更“好”的范围,使得浮点数变得更加密集;比较理想的数值范围是在1.0的数量级上,即浮点数指数为0。
还有一种情况是:目标函数存在不可导点(kinks)。
不可导点是指目标函数不存在导数的部分,ReLU、SVM损失函数、Maxout神经元等都存在kinks点。以ReLU函数为例,当x=0时,函数不可导,即是函数的一个kinks点,下图1是ReLU的函数曲线:
 图1
图1
在x=e-6处,理论梯度应该是0,但当使用上面公式(2)求梯度时,如果h>e-6,求出的梯度结果并不为0,因为 f(x+h) 越过了不可导点。而在实际应用中,上述情况是很常见。例如,用CIFAR-10训练的SVM中,样本数为50000个,每个样本产生9个 max(0,x) 式子,所以共有 450,000个式子,所以遇到很多的不可导点是正常现象。
针对上面的情形,课中给出的建议是:
(1)使用少量的数据点。因为含有不可导点损失函数的数据点越少,出现的不可导点就越少,在计算有限差值近似时越过不可导点的概率就越小;并且这还可以使得检查过程变得高效。
(2)谨慎设置步长 h 。步长值并不是越小越好,当h过小时,可能会遇到上面说的数值精度问题。如果梯度检查无法进行,可以尝试将 h 调到1e-4或者1e-6。
(3)需要注意梯度检查的时机。最好让神经网络学习一小段时间,等到损失函数开始下降的以后再进行梯度检查。因为如果从一开始就进行梯度检查,此时梯度可能正处于不正常的边界。
另外,梯度检查还需要注意的三点有:
(1)计算数据损失时注意正则化损失的影响,不要让正则化损失掩盖数据损失。
由于损失函数包括数据损失和正则化损失两部分,所以可能存在正则化损失吞没数据损失的风险。建议做法是:先关掉正则化部分,而是对数据损失做单独检查,然后再对正则化损失做单独检查。
对正则化做单独检查的方法有:1. 修改代码,去掉其中数据损失的部分; 2.提高正则化强度,确认其效果在梯度检查中能否忽略。
(2)注意随机失活和数据扩张的不确定影响。
这可能给计算梯度结果带来不确定的误差影响。如果关闭这些操作,则无法对它们进行梯度检查(例如随机失活的反向传播可能存在错误),所以更好的解决方法是在计算 f(x+h) 和 f(x-h) 前强制增加一个特定的随机种子,在计算解析梯度时也采取这个方法。
(3)检查少量的维度。
在实际应用中,神经网络可能有上百万的参数,在这种情况下只能检查部分维度。但需要注意的是,选取的参数应该从所有不同的参数中选取部分检查,避免出现从参数向量中随机选取出的参数可能只是偏置参数的情况。
进行学习之前的合理性检查技巧:
参数调优的过程是费时费力的,所以在开始之前,下面的技巧是很有必要的:
(1)原文中“Look for correct loss at chance performance”,这里的chance performance指的是不是统计概率中的得分的意思(我不确定,如果有清楚的还望告知!)。 当使用小参数初始化时,确保得到的损失值与期望的损失值是一样的。最好的方式是单独对数据损失进行检查(正则化强度置零)。
(2)当增大正则化强度时,查看损失值是否跟着变大。
(3)在整个数据集进行训练之前,先在一个很小的数据集上进行训练(比如20个数据),并设置正则化强度为0,确保此时的损失值为0。只有这个检查通过,整个数据集的训练才有意义。
学习过程中的检查:
在神经网络训练过程中,有许多有用的参数(例如损失函数值,验证集和训练集的准确率,权重的更新比例等)需要监控,这些参数对于不同超参数的设置和调优具有指导意义。
(1)损失函数值
 图2
图2
上图2中,x轴表示周期。左面是不同学习率对应的损失函数值曲线;右图是一个典型的损失函数值随时间的变化曲线。从左图中,我们发现,学习率设置过高时,损失值并不单调了,而红色曲线对应的是较好的学习率。
另外,损失函数值的震荡程度还与批尺寸(batch size)有关:当批尺寸为1时,震荡相对会比较大;当批尺寸是整个数据集时,震荡会比较小,因为每个梯度的更新都在单调地优化损失函数(学习率过高除外)。
(2)训练集和验证集的准确率
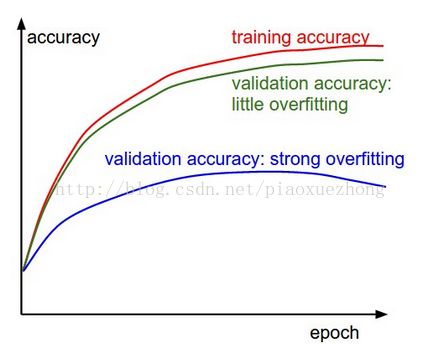 图3
图3
上图3中,蓝色的验证集曲线表明相比于训练集/验证集的准确率低了很多,两者中间的缝隙程度也能模型过拟合的程度。此时应该增大正则化强度(更大的权重惩罚,更多的随机失活等)或者收集更多的数据。 如果遇到验证集曲线和训练集曲线近乎重合的情况,说明模型容量不够大,此时应该通过增加参数的数量使得模型容量更大些。
(3)权重的更新比例
这个之前课中也提过,这个参数指的是每次训练后有更新的权重占所有权重的比例。经验性的结论是这个比例应该在1e-3左右,如果小于此值,表明学习率可能设置的过小;如果大于此值,表明学习率可能设置的过大。
(4)课中还给出了几种判别学习过程是否出现问题的方法
- 输出网络中所有层的激活数据和梯度分布的柱状图。例如,使用tanh的神经元的激活数据的值,应该分布在整个[-1,1]区间内,但如果出现神经元的输出全部是0,或者集中在-1和1上,那么就表明有问题了。
- 如果数据是图像像素数据,可以把第一层特征可视化。
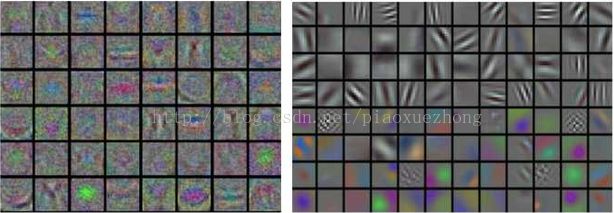 图4
图4
上图是将将神经网络的第一层权重可视化的例子。左边的特征充满了噪音,表明网络可能出现了以下问题:网络不收敛,学习率设置不恰当,正则化惩罚的权重过低等。右边的特征比较平滑,干净而且种类多,表明训练过程良好。
-----------第二部分:参数调优----------
参数更新:
优化算法是通过改善训练方式,来最小化(或最大化)损失函数的过程。优化算法分为两大类:
1. 一阶优化算法。为了计算多变量函数的导数,会用梯度取代导数,使用偏导数来计算梯度。
2. 二阶优化算法。 二阶优化算法使用二阶导数(也叫Hessian方法)优化损失函数。课中也提及了其迭代公式,但是由于其计算成本比较高,所以应用的并不广泛,不加说明了。
当可以使用反向传播计算解析梯度后,梯度能被用来进行更新参数的过程。课中提及了几种网络优化算法:梯度下降法,动量更新法,学习率退火法等。
(1)梯度下降法。 参数更新最简单的方式是沿着梯度负方向改变参数。假设参数向量为x ,其梯度为dx,更新形式为:
x += - learning_rate * dx注:批量梯度下降在计算损失函数的梯度时,是遍历数据集中的每一个样本,如果在每一次迭代中都进行梯度下降是非常低效的,因为算法的每次迭代仅以很小的步进来提升损失函数。为了解决这个问题,可以使用小批量(Mini-batch)梯度下降算法,该算法在数据集的一个小批量上近似计算梯度,然后使用这个梯度去更新权值。比如卷积神经网络,每次在训练集中选择包含256个样本的一批数据,然后使用这批数据计算梯度,完成参数更新,代码附在下面。用来估计梯度的 batch 大小是可以选择的一个超参数,当它等于 1 时,即为随机梯度下降(SGD),大多数深度学习框架都会选择随机梯度下降的 batch 大小。
#批量梯度下降的实现:
while True:
weights_grad = evaluate_gradient(loss_fun, data, weights)
weights += - step_size * weights_grad # perform parameter update
#小批量梯度下降的实现
while True:
data_batch = sample_training_data(data, 256) # sample 256 examples
weights_grad = evaluate_gradient(loss_fun, data_batch, weights)
weights += - step_size * weights_grad # perform parameter update
#随机梯度下降的实现
while True:
data_batch = sample_training_data(data, 1) # use a single example
weights_grad = evaluate_gradient(loss_fun, data_batch, weights)
weights += - step_size * weights_grad # perform parameter update1. 很难选择合适的学习率。学习率太小会导致网络收敛过于缓慢,而学习率太大可能会影响收敛,并导致损失函数在最小值上波动,甚至出现梯度发散。
2. 相同的学习率并不适用于所有的参数更新。尤其是训练集数据很稀疏,并且特征频率非常不同的时候;对于很少出现的特征,应使用更大的更新率。
3. 在神经网络中,最小化非凸误差函数的一大挑战是避免陷于局部最小值中。实际问题中这并非源于局部极小值,而是来自鞍点,即在一个维度向上倾斜但在另一维度向下倾斜的点。鞍点通常被相同误差值的平面包围,这使得SGD算法很难脱离出来,因为梯度在所有维度上接近于零。
(2)动量更新法。动量法或说具有动量的 SGD 有助于加速向量向着正确的梯度方向下降,加快收敛速度。
SGD方法中的高方差振荡会使得网络震荡,动量(Momentum)更新方法可以通过优化相关方向的训练和弱化无关方向的振荡,来加速SGD训练过程。动量更新有两种定义方法:一种是吴恩达提出的:定义一个动量,即是梯度的移动平均值。然后用它来更新网络的权重,公式如下:
![]()
![]()
式中 L 是损失函数,α 是学习率,β为动量项,一般取值0.9。另一种表达动量更新的方式是:
![]()
![]()
# Momentum update
v = mu * v - learning_rate * dx # integrate velocity,mu即上面的动量项
x += v # integrate position Nesterov动量:当参数向量位于位置 x 时,由上面的代码可知,动量部分会通过 mu * v 稍微改变参数向量。可以将未来的近似位置x + mu * v 看做是“向前看”,并计算 x + mu * v处的梯度。视图如下:
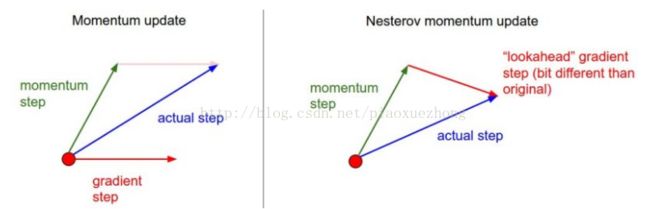
x_ahead = x + mu * v
# evaluate dx_ahead (the gradient at x_ahead instead of at x)
v = mu * v - learning_rate * dx_ahead
x += v 训练深度网络过程中,让学习率随着时间减弱是一种有效地方法。如果学习率很高,系统的动能就很大,参数向量跳动的就回厉害,不能够稳定到损失函数更深更窄的区域。通常,学习率退火有3种方式:
- 随步数衰减:每进行几个周期就根据一些因素降低学习率。典型的值是每过5个周期就将学习率减少一半,或者每20个周期减少到之前的0.1。这些数值的设定是严重依赖具体问题和模型的选择的。在实践中可能看见这么一种经验做法:使用一个固定的学习率来进行训练的同时观察验证集错误率,每当验证集错误率停止下降,就乘以一个常数(比如0.5)来降低学习率。
- 指数衰减。数学公式是
 ,其中t是迭代次数(也可以使用周期作为单位)。
,其中t是迭代次数(也可以使用周期作为单位)。 - 1/t衰减。数学公式是
 。
。
单参数自适应学习率方法
# Assume the gradient dx and parameter vector x
cache += dx**2
x += - learning_rate * dx / (np.sqrt(cache) + eps)(2) RMSprop,该方法并未发表,出自于Geoff Hinton的Coursera课程中的第六节课的第29页PPT。该方法是对Adagrad方法的改进,它 使用梯度平方的滑动平均方式使得不像Adagrad那样激进。
cache = decay_rate * cache + (1 - decay_rate) * dx**2
x += - learning_rate * dx / (np.sqrt(cache) + eps)m = beta1*m + (1-beta1)*dx
v = beta2*v + (1-beta2)*(dx**2)
x += - learning_rate * m / (np.sqrt(v) + eps) 图1
图1 图2
图2- Leon Bottou的《SGD要点和技巧》
- Yann LeCun的《Efficient BackProp》
- Yoshua Bengio的《Practical Recommendations for Gradient-Based Training of Deep Architectures》
参考:
http://cs231n.github.io/neural-networks-3/
https://zhuanlan.zhihu.com/p/21741716?refer=intelligentunit
https://zhuanlan.zhihu.com/p/21798784?refer=intelligentunit
http://blog.csdn.net/u012526120/article/details/49183279
https://zhuanlan.zhihu.com/p/27449596?utm_source=weibo&utm_medium=social