罗技方向盘SDK开发笔记
这段时间因为项目需求,接触到了罗技G29方向盘的SDK开发,能够参考的资料比较有限,一路磕磕碰碰遇见不少问题,硬着头走了下去,不过最后还是成功了,写下这篇笔记来记录下我的开发过程,也给有需要的人参考,少走点弯路
一.开发环境和开发工具
开发环境:win10
开发工具:vs2017
方向盘型号:罗技G29
开发前的准备
(1).去罗技官网上下载罗技方向盘SDK
https://www.logitechg.com.cn/zh-cn/innovation/developer-lab.html
文件中有相关的.h和.lib文件,以及三个mfc例程以及相关的说明文档
(2).下载罗技游戏软件
这里要说一下,在SDK文档里提出了方向盘得在罗技游戏软件运行的情况下才能进行相关的SDK开发,所以这个软件在开发中需要全程运行,注意下载后它会提醒你下载新的罗技 G support,别理它就是了,罗技 G support根本就识别不出来罗技G29方向盘.
下载链接:https://support.logi.com/hc/zh-cn/articles/360025298053
(3).检测方向盘是否正常工作
正常情况下,在方向盘上电并接入电脑后,方向盘会自动旋转几圈然后拨正,打开罗技游戏软件的时候也会有这个现象,接好方向盘并且打开罗技游戏软件,我们来通过官方提供的demo来检测一下方向盘是否能够正常工作.
先介绍一下这几个demo
 第一个是个比较完善的demo,打开后的界面大概如下
第一个是个比较完善的demo,打开后的界面大概如下
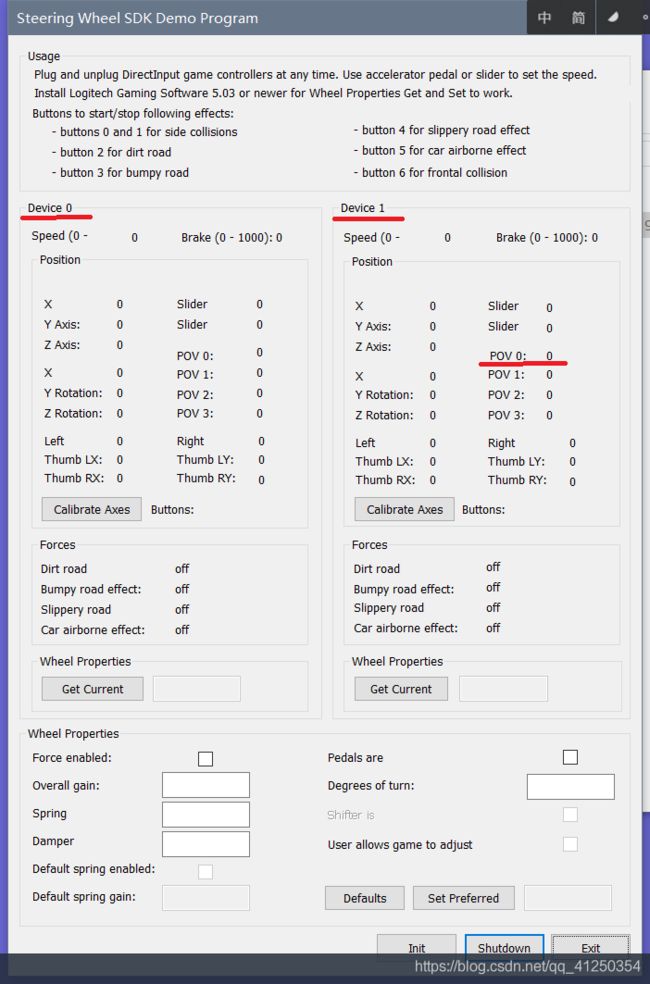 正常情况下,在点击INIT按钮后,界面上就会出现方向盘的相关数据,这里我没有接入方向盘,所以就没有显示,我们需要记录下一些数据,首先是确认下数据是出现在哪块区域的,就是divice 0 还是divice 1,这关系到后面相关api的调用参数,还有就是按下方向盘上的十字按键后,是在POV 0 还是POV 1显示数据的理由同上。
正常情况下,在点击INIT按钮后,界面上就会出现方向盘的相关数据,这里我没有接入方向盘,所以就没有显示,我们需要记录下一些数据,首先是确认下数据是出现在哪块区域的,就是divice 0 还是divice 1,这关系到后面相关api的调用参数,还有就是按下方向盘上的十字按键后,是在POV 0 还是POV 1显示数据的理由同上。
第二个demo我也没搞懂究竟是干什么用的,不过我这边的开发也用不到这个demo,感兴趣的可以去自己研究
第三个demo比较有意思,这个demo是罗技官方提供给开发者用来测试SDK中提供的相关API是否能够正常工作的MFC程序
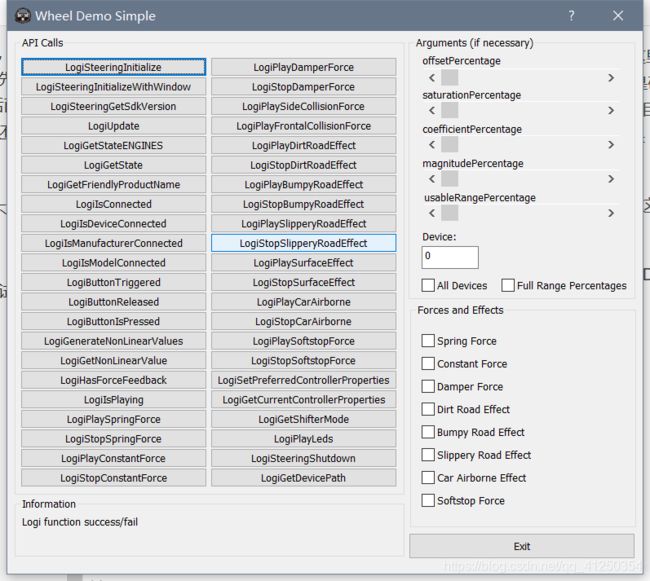 具体的代码逻辑就是你点击相关的API按钮,它就会调用相关的API,然后将返回结果显示在下方的信息栏里面,不过这个demo没有写完整,很多按钮的功能都还没有实现,你点击的话它会提示这个功能还没有写完(???,官方拖更),不过并不影响我们正常获取方向盘数据
具体的代码逻辑就是你点击相关的API按钮,它就会调用相关的API,然后将返回结果显示在下方的信息栏里面,不过这个demo没有写完整,很多按钮的功能都还没有实现,你点击的话它会提示这个功能还没有写完(???,官方拖更),不过并不影响我们正常获取方向盘数据
二.阅读SDK文档,弄清相关的API调用顺序
(1).这里我就简单介绍一下几个关键的函数,首先是两个初始化函数
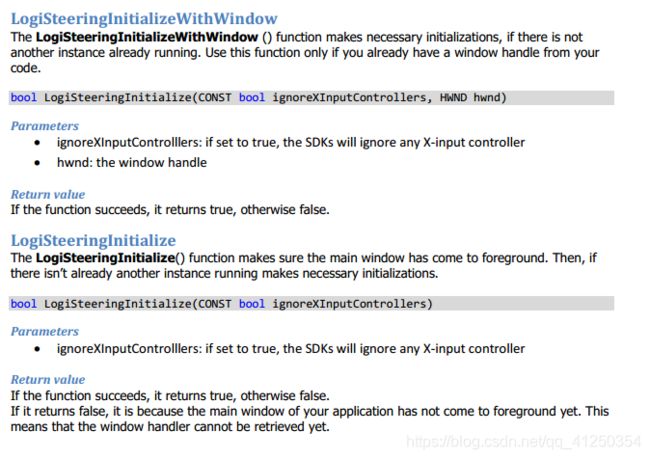 bool LogiSteeringInitialize(CONST bool ignoreXInputControllers)
bool LogiSteeringInitialize(CONST bool ignoreXInputControllers)
这个初始化函数会自动寻找当前处于最前端的窗口句柄并传入给这个函数进行方向盘的初始化,不过我在实际使用中这个函数经常抽风,返回值一直不稳定,所以我在后面的程序开发中舍弃了使用这个初始化的打算
bool LogiSteeringInitializeWithWindow(CONST bool ignoreXInputControllers, HWND hwnd)
这个函数的效果和上一个函数是一样的,第一个参数是是否忽略X-IPU的参数,第二个参数是当前程序的窗口句柄,这个函数的不同之处在于我们需要手动将你写的程序界面的句柄传入到这个函数里面去,那么什么是句柄呢?
我也看了不少资料,我是把它理解为界面程序的类似pid号的一个东西,让windows系统能够找到你的界面程序,这是我遇见的第一个坑,当初我想如果用windows编程创建一个窗口的话太麻烦了,底层的代码又臭又长,想直接通过获取win32控制台程序的句柄传入到这个函数里面去,但初始化结果一直都是失败的,折腾了很久一直都没有搞定,最好还是老老实实写了一个空界面来初始化,值得一提的是,这个初始化函数要求当前界面处于所有应用的最顶端,意思就是如果你把这个界面缩小,获取点击其他界面后,这个程序就拉跨了,所以在使用的时候要确保这一点
(2).相关API的调用顺序
这里贴一张图,是来自于其他博主的,使用的C#的sdk,不过流程都是一致的
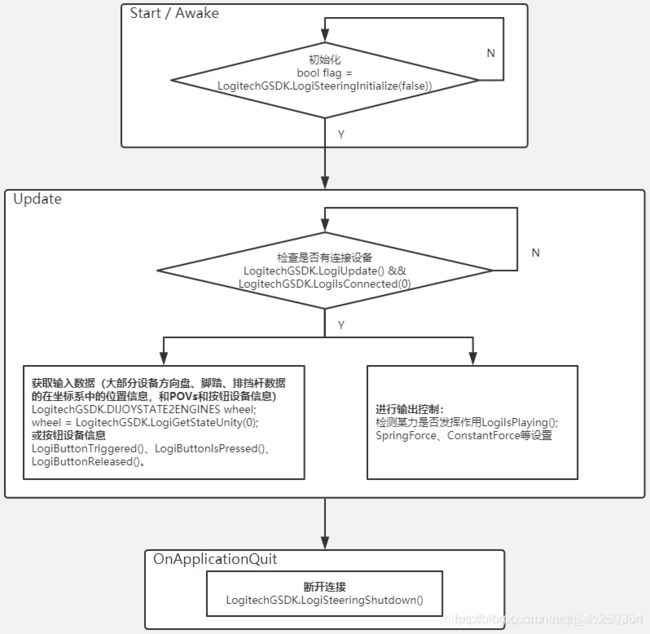 在C/C++使用的时候直接把前面的类名去掉即可,然后将初始化的函数换成
在C/C++使用的时候直接把前面的类名去掉即可,然后将初始化的函数换成
LogiSteeringInitializeWithWindow,值得一提的是,如果方向盘初始化成功的话,方向盘的旋转阻力会变成0,所以可以通过这个方法来判断方向盘是否初始化成功.
三.搭建开发环境
创建一个空的windows桌面应用程序,并且将SDK包中提供的头文件和库文件复制到项目目录下面,并且配置好,具体的配置过程可以参考下面
 然后在你的main.cpp里面添加
然后在你的main.cpp里面添加
#pragma comment(lib, "LogitechSteeringWheelLib.lib")
先贴一下完整的代码,我这个程序主要是获取方向盘的基础数据,转向,油门,刹车等信息后上传到局域网内的服务器上
#include 方向盘的基础信息是整合在一个 DIJOYSTATE2的结构体里面,然后通过
DIJOYSTATE2* LogiGetState(const int index);
方法来返回该结构体变量,然后输出变量成员来获取数据,这个函数的传入参数是设备的ID号,就是我在前面提到的divice 0 还是divice 1
提一下方向盘按键数据的获取,主要是通过
bool LogiButtonTriggered(const int index, const int buttonNbr);
获取的,第一个参数的设备ID,第二个参数是按键编号,具体的编号可以打开罗技游戏软件,然后看方向盘上的编号,不过要注意一下,实际上调用的编号是软件上显示的编号-1。
最后推荐一篇其他人的笔记,写的比我详细多了,想要深入研究的可以参考一下这篇文档
G29开发笔记