参考《计算机图形学——原理方法与应用》周/伏 华中科技大学出版
造型技术的发展
CAD/CAM的核心技术是几何造型技术[5–9]── 一项研究在计算机中如何表示物体模型形状的技术。
在CAD/CAM技术四十多年的发展历程中,经历了四次重大的变革。
60年代初期的CAD系统只能处理简单的线框模型,提供二维的绘图环境,用途比较单一。
进入70年代,根据汽车造型中的设计需求,法国人提出了贝塞尔算法,随之产生了三维曲面造型系统CATIA。它的出现,标志着CAD技术从单纯模仿工程图纸的三视图模式中解放出来,首次实现以计算机完整描述产品零件的主要信息。这是CAD发展历史中的第一次重大飞跃。
1979年,SDRC公司发布了世界上第一个完全基于实体造型技术的大型CAD/CAE软件──IDEAS。由于实体造型技术能够精确表达零件的全部属性,在理论上有助于统一CAD、CAE、CAM的模型表达,给设计带来了惊人的方便性。可以说,实体造型技术的普及应用标志着CAD发展史上的第二次技术革命。但是,在当时的硬件条件下,实体造型的计算及显示速度太慢,限制了它在整个行业的推广。
90年代初期,参数化技术逐渐成熟,标志着CAD技术的第三次革命。参数化技术的成功应用,使得它在1990年前后几乎成为CAD业界的标准。
随后,SDRC攻克了欠约束情况下全参数的方程组求解问题,形成了一套独特的变量化造型理论。SDRC将变量化技术成功的应用到CAD系统中,标志着CAD技术的第四次革命。
随着CAD技术和几何造型技术的发展, 近年来, 市场上出现了一大批优秀的几何造型软件及工具。例如,PTC公司的产品Pro/E、SDRC的产品I-DEAS Master Series、UGS公司的产品Unigraphics、IBM公司的产品CATIA/CADAM、Autodesk公司的产品MDT、Spatial Tech公司的ACIS、EDS公司的Parasolid等。在国内,清华大学、北京航空航天大学、华中理工大学、浙江大学、上海交通大学、西北工业大学,以及其他一些单位也发表了一些关于特征造型技术研究的论著,并开发了一些特征造型系统,例如:清华大学开发的TiGems造型系统,北京航空航天大学研制出的微机版“金银花(LONICERA)”系统,武汉开目信息技术有限责任公司开发的开目三维CAD软件等等。
造型系统简介
Parasolid和ACIS是两个最有代表性的几何造型系统的开发平台。在早期开发的实体造型系统中,英国的剑桥大学研制出了BUILD-1和BUILD-2系统,但都没有公开使用。80年代初期,研究小组的一部分人组建了Shape Data公司,并开发了实体造型系统Romulus。1986年,Shape Data并入EDS Unigraphics之后,推出了功能强大的几何造型核心Parasolid。同时,Shape Data一部分保留人员研制了新的造型核心,就是后来由Spatial Technology公司推出的几何造型系统核心ACIS。
Parasolid和ACIS并不是面向最终用户的应用系统,而是“几何引擎”,作为应用系统的核心。用户可用它们作为平台,开发自己的应用系统。当今许多流行的商用CAD/CAM软件,如Unigraphics、Solidedge、Solidwork、MDT等,都是在Parasolid或ACIS的基础上开发出来的。
Parasolid有较强的造型功能,但是只能支持正则实体造型。它提供的主要功能有:集合运算、特征的创建和编辑、局部操作、数据交换文件接口等。Parasolid采用精确的边界表示,包括拓扑、几何和关联三种数据类型。
ACIS具有和Parasolid相似的形体结构,但在系统结构上采用了核心和外壳相结合的方式。ACIS支持线框、表面和实体的统一表示,支持非正则形体的造型。
在上述几何实体造型系统中,通常都会提供一些基本的形体输入方法,以及拉伸,旋转,蒙皮,扫描等直接构造形体的方法,通过集合运算对形体进行拼合。虽然对这些造型方法的研究取得了一系列新进展,但是集合运算仍基本局限在对两个体进行正则运算(交,并,差)上,而且结果形体的信息都已经包含在两个参加运算的原始形体之中,不能引入新的信息。实际应用中,有些机械零件具有特定的形状特征,不能通过集合运算来直接完成,或者直接实现时操作步骤非常复杂。但是,它们的生成方法和集合运算非常相似,可以看作是集合运算的扩展。拔模和抽壳都属于这一类型的造型方法。
三维形体的表示
三维造型技术是建立恰当的模型来表示自然界中形态丰富的三维物体的技术,根据造型对象将造型技术分成3类。
第一类是曲面造型,主要研究计算机内如何描述一张曲面,及曲面的显示与控制。曲面造型又分成规则曲面和不规则曲面两种。不规则曲面造型方法主要有贝塞尔曲线曲面、B样条曲线曲面和孔斯曲面等。(二维曲线:Nurbs(通过拟合点)、三次B样条(通过控制点)、贝塞尔(控制点和拟合点重合)和波浪线(B样条)))
第二类是立体造型方法,主要研究在计算机内如何定义、表示一个三维物体,主要有体素构造法、边界表示法和八叉数法等等。曲面造型和立体造型合称几何模型造型。该技术主要应用在机械行业辅助设计制造领域(CAD)。
第三类是自然景物模拟,主要研究在计算机内如何模拟自然景物,如云、流水、树等。该造型技术主要应用在游戏和艺术造型等领域。
如下主要说说几何模型的表示。
在计算机中,表示几何形体的方法通常有三种:线框模型、表面模型和实体模型
一、线框模型
该模型采用三维形体的全部顶点及边的集合来描述三维形体,即用顶点表和边表
两个表的数据结构来表示三维模型。每条边由两个顶点表示。
主要优点是结构简单,处理容易。描述二维目标十分理想。但对三维物体,存在如下缺点:
1)没有面的信息,它不能表示表面含有曲面的物体。
2)不能明确定义点与物体之间的关系。
3)点和边信息容易出现二义性。
二、表面模型
在线框模型的基础上,增加了物体中的面的信息,用面的集合来表示物体,每个面由多条有向边构成,用环来定义面的边界,即是用顶点表、边表和面表来描述模型。 表面模型又分为平面模型和曲面模型。前者以多边形网格为基础。后者以参数曲面块为基础。
表面模型存在的不足就是它只能表示物体的表面边界,而不能表达出真实实体的属性,很难确认一个表面模型表示的三维图形是一个实体还是一个空壳。这个不足,在实体模型中得到了解决。
三、实体模型
实体模型是最高级的模型,它能完整表示物体的所有形体信息,可以无歧义地确定一个点是在物体外部还是内部或表面上。
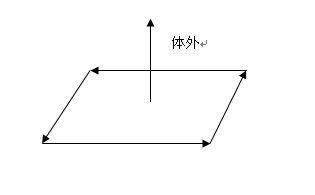
实体模型使用有向边的右手法则来确定所在面的外法线方向。即用右手沿边的顺序方向握住,大拇指所指向为该面的外法线方向。法线方向指向体外。
实体模型存在着不同的数据结构,在这些结构中存在一个共同点,即数据结构不仅记录了物体全部的几何信息,而且还记录了所有的点、线、面、体的拓扑信息(即空间位置关系)。实体模型的构造通常使用体素(即原始的基本实体),经集合论中的交、并、差运算构成复杂形体。
1. 实体的定义
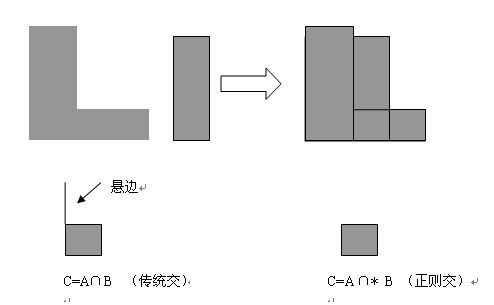
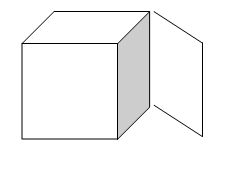
实体就是有效的物体,即客观世界中确实存在的物体,要在计算机内表示、构造一个实体,就必须给出实体的确切定义(即用最小的数据结构唯一地确定实体的形状和位置。)如下图带有悬挂面的立方体就不是实体,在客观世界中不可能存在这样的物体。
作为实体应满足如下条件:
1.刚性。一个实体必须具有一定的形状(流体不属于实体)
2.维数一致性。一个实体的各个部分必须是三维的,不能存在悬挂的、孤立的边界。
3.有限性。一个实体必须占有有限的空间。
4.边界确定性。根据实体的边界,可确定实体的内部或外部。
5.封闭性。经过集合运算后,仍然是有效的实体。
实体的表面必须具备如下性质:
1. 连通性。表面任意两点都可用表面上的一条路径连接起来。
2. 边界性。
3. 非自相交性。一个实体表面不可自相交。
4. 可定向性。一个实体的表面两则可明确定义出实体的内侧和外侧。
5. 封闭性。一个表面的封闭性由多边形网格各元素的拓扑关系确定的。即每条边连接且仅连接两个面,每条边有且仅有两个端点。
从点集拓扑角度给出实体的定义。将三维实体看作是空间中点的集合,它由内点与边界点共同组成。
内点是指点集中的这样一些点:它们具有完全包含于该点集的充分小的领域。点集中除内点外的所有的点就是边界点。
所以三维物体A可表示为:
A = {bA,iA}
bA为物体A的边界点集;iA为物体A的内部点集。
定义点集的正则运算r如下:
rA = ciA
i为取A的内点运算;
c为取闭包运算;
A为一个点集。
iA为A的全体内点组成的集合,称为A的内部,它是一个开集(“开集”可以理解为没有边界值去判断点是否为内点)。
ciA为A的内部的闭包,是iA与其边界点的并集。(据此可以理解“闭包”的含义),它本身是一个闭集,(“闭集”可以理解为可以通过明确的边界值来判断点是否在集合中)。
正则运算即为:先对物体取内点再取闭包的运算。rA称为物体A的正则点集。如图:

以上图中,图1有悬边所以点集不是有效实体,图2没有边界,不是满足“封闭性”所以也不是实体。图3为正则点集,封闭性,也满足实体的其他条件,所以为实体。
正则点集有时也不一定是实体。如下图:
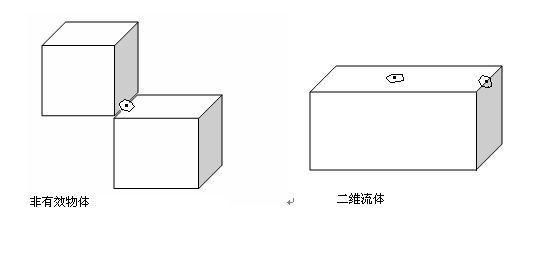
左图为正则点集,但它不是有效的物体。由此,就会涉及到另外一个概念“二维流体”。
二维流体是指对于实体表面上的任何一点,都可以找到一个围绕着它的任意小的领域,该领域在拓扑(即是空间位置)上与平面上的一个圆盘是等价的(也就是在表面上存在着一个领域围绕着某个点)。这意味着,在领域的点集和圆盘之间存在着连续的一对一的对应关系。如上右图,立体表面上任一点都存在与圆盘同构的领域。而左图,两个立方体共享边被四个面共享,其上的点不存在这样的唯一的领域(在上图中,共享边的点,存在围绕它的领域有两个)。
有了上述概念后,实体可以这样描述为:
对于一个占据有限空间的正则点集,如果其表面是二维流形,则该正则点集为实体(有效物体)。
2. 正则集合运算
能产生正则几何体(有正则点集组成的形体)的集合运算称为正则集合运算。正则集合运算与传统集合运算的区别主要是在对产生结果的边界面的处理上,其内部点的处理是一致的。
正则运算主要是考虑如何消除或不产生悬点、悬边和悬面。如下图:
上图,左边为传统的交运算结果,右边为正则的交运算结果。在传统的集合运算符后加“*”号表示正则运算符。
实现正则集合运算有两种方法:间接法和直接法。间接法是先按普通集合运算求出结果,后用一些规则判断,以消除不符合正则几何定义的部分(即悬边、悬面等),从而得到正则几何体。直接法是定义正则集合算子的表达式,用以直接得出符合正则几何体定义的结果。
正则几何运算定义如下:
A* B = r ( A B ) ;
式中表示传统集合并、交、差算子;
*表示相应的正则并、交、差算子;
r是集合的正则化算子。
实体造型是以立方体、圆柱体、球体、锥体、环状体等多种基本体素为单位元素,通过集合运算(拼合或布尔运算),生成所需要的几何形体。这些形体具有完整的几何信息,是真实而唯一的三维物体。所以,实体造型包括两部分内容:即体素定义和描述,以及体素之间的布尔运算(并、交、差)。布尔运算是构造复杂实体的有效工具。目前常用的实体表示方法主要有:构造实体几何法(CSG)、边界表示法(BRep)和扫描法。
物体的
CSG
树表示
物体的体素构造表示法(Constructive Solid Geometry, CSG)是用两个物体间的并、交、差
正则集合运算操作生成一个新的物体的方法。
CSG表示法:先定义一些形状比较简单的常用体素,如方块、圆柱、圆锥、球、棱柱等。然后用集合运算并、交、差把体素修改成复杂形状的形体。早期的CSG模型仅使用代数方程及半空间的概念,体素只支持多面体与二次曲面体,而不支持表面含有自由曲面的实体。整个模型是棵树结构,最终形体的表面交线与有效区域没有显式给出,不能直接用于NC加工与有限元分析等后继处理。
集合运算构造实体的过程可用二叉树结构表示,称该二叉树为CSG树。树的叶节点表示体素或带有几何变换参数的体素,非叶节点表示施加于其子节点的正则集合算子,或称布尔算子。树的根节点表示集合运算的最终结果,也即希望得到的实体。
边界表示法
边界表示法(Brep-Boundary Representation)通过描述物体的边界来表示一个物体。所谓的边界是指物体的内部点与外部点的分界面,定义了物体的边界,该物体也就被唯一地定义了。如下图:
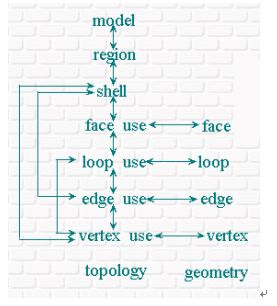
边界表示法一个重要的特点是:描述物体的信息包括几何信息与拓扑信息两个方面。几何信息是指物体在欧氏空间中的位置、形状和大小;而拓扑信息是指拓扑元素(顶点、边和表面)的数量及其相互间的连接关系。拓扑信息构成物体的“骨架”,而几何信息则犹如附着在这一“骨架”上的“肌肉”。
几何信息有面(face)、环(loop)、边(edge)和点(vertex),拓扑信息有模型(model)、 区域(region)、外壳(shell)、面引用(face use)、环引用(loop use)、边引用(edge use)和点引用(vertex use)。如下图是用辐射边数据结构表示的一个形体模型,注意其中实体、面、线是用统一的数据结构表示的。
顶点
顶点(Vertex)的位置用(几何)点(Point)来表示。点是几何造型中的最基本的元素,自由曲线、曲面或其它形体均可用有序的点集表示。用计算机存储、管理、输出形体的实质就是对点集及其连接关系的处理。
在正则形体定义中,不允许孤立点存在。
边
边(Edge)是两个邻面(对正则形体而言)、或多个邻面(对非正则形体而言)的交集,边有方向,它由起始顶点和终止顶点来界定。边的形状(Curve)由边的几何信息来表示,可以是直线或曲线,曲线边可用一系列控制点或型值点来描述,也可用显式、隐式或参数方程来描述。形体中与一条空间曲线相联系,以及包含其两个端点和引用它的
所有环边等信息的拓扑元素称为边。
环
环(Loop)是有序、有向边(Edge)组成的封闭边界。环中的边不能相交,相邻两条边共享一个端点。环有方向、内外之分,外环边通常按逆时针方向排序,内环边通常按顺时针方向排序。
面
面(Face)由一个外环和若干个内环(可以没有内环)来表示,内环完全在外环之内。根据环的定义,在面上沿环的方向前进,左侧总在面内,右侧总在面外。面有方向性,一般用其外法矢方向作为该面的正向。若一个面的外法矢向外,称为正向面;反之,称为反向面。面的形状(Surface)由面的几何信息来表示,可以是平面或曲面,平面可用平面方程来描述,曲面可用控制多边形或型值点来描述,也可用曲面方程(隐式、显式或参数形式)来描述。对于参数曲面,通常在其二维参数域上定义环,这样就可由一些二维的有向边来表示环,集合运算中对面的分割也可在二维参数域上进行。
体
体(Body)是面的并集。在正则几何造型系统中,要求体是正则的,非正则形体的造型技术将线框、表面和实体模型统一起来,可以存取维数不一致的几何元素,并可对维数不一致的几何元素进行求交分类,从而扩大了几何造型的形体覆盖域。 几何形体是由封闭表面围成的空间,是欧氏空间中非空、有界的封闭子集,其边界是有限个面的并集。
外壳
外壳是一些点、边、环、面的集合,其所含的面集有可能围成封闭的三维区域,从而构成一个实体;外壳还可以表示任意的一张曲面或若干个曲面构成的面组;外壳还可以是一条边或一个孤立点。外壳中的环和边有时被称为“线框环”和“线框边”,这是因为它们可以用于表示形体的线框图。
区域
由一组外壳组成,而模型由区域组成。
正则形体
对于任一形体,如果它是三维欧氏空间R3中非空、有界的封闭子集,且其边界是二维流形(即该形体是连通的),则称该形体为正则形体,否则称为非正则形体。
在这种表示法中,由于物体的点、边和表面以独立对象的形式的存在,所以可以方便地对物体进行各种局部修改。
多面体的顶点、边和表面之间的拓扑关系可用9种不同的形式予以描述:
1. 顶点相邻性,表示 v->{v}
2. 顶点—边相邻性,表示v->{e}
3. 顶点—面相邻性,表示v->{f}
4. 边—顶点,
e->{v}
5. 边—边
e->{e}
6. 边—面
e->{f}
7. 面—顶点
f->{v}
8. 面—边
f->{e}
9. 面—面
f->{f}
边界表示的数据结构
两种典型的边界表示法数据结构主要包括:翼边结构,双向边表(DCEL―Doubly Connected Edge List) ,半边结构,四边结构,辐射边(Radial-Edge)结构等等。其中半边结构非常适合表示正则形体。
翼边结构
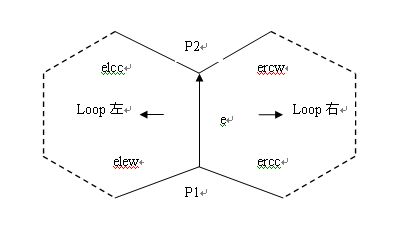
在顶点、边、表面等组成物体的三要素中,翼边结构以边为中心来组织数据。如下图:
struct Edge{
Vertex P1,P2;
Loop *LeftLoop,*RightLoop;
struct Edge *ercw,*ercc,*elcc,*elcw;
}
上图菱边e作为有向线段,其数据结构中包含有两个指针,分别指向e的两个端点:起点P1和终点P2。此外,e中还设置有两个环指针,分别指向菱边e所邻接的两表面上的环Loop左和Loop右。这样就确定了菱边e与相邻表面之间的拓扑关系。为了能从边e出发找到它所在的任一闭合面环上的其他菱边,在e中又增加了四个边指针ercw、ercc、elcc、elcw,ercc表示e在右面环中沿逆时针方向所连接的下一条菱边,elcw表示e在左面环中沿顺时针方向所连接的下一条边,余类推。
由于翼边结构边的构造和使用比较复杂,后来在此结构基础上改进,提出了半边数据结构。半边结构已成为边界表示的主流数据结构。
半边数据结构
实体的B-rep表示模型是一非常复杂的模型,要求能够表达出多面体各几何元素之间完整的几何和拓扑关系,并且允许对这种几何和拓扑关系进行修改.在B-rep表示中,体、面、边和顶点是最基本的几何元素,在实体的拼合、显示、分析计算或人机交互过程中,对基本几何元素的下列操作是必不可少的:
.增加或删除体、面、边或顶点;
.已知一个体,查找它的所有面、所有边或所有顶点;
.已知一个面或一个边,查找它所属于的体;
.已知一个面,顺序查找围成它所有边;
.已知一个边,查找交于该边的所有面,或着查找该边的邻边,或者查找该边的两个端点;
.已知一个顶点,查找交于该顶点的所有边或所有面.
以上这些基本操作的效率直接影响着整个实体造型系统的效率。一个B-rep数据结构应当方便、迅速地实现几何元素的这些查询或增删操作.
为了查询或操作方便,必须建立各几何元素间的拓扑关系,且引入其它辅助元素,例如在许多B-rep数据结构中具有环结点,用来表示面的内、外封闭边界.在B-rep的数据结构设计时,除了需要考虑时间的因素外,还要考虑空间的因素,即模型所占计算机内存的大小,但往往这两方面是互相矛盾的.要想各个几何元素之间查询迅速,必然要在它们之间建立广泛的联系,这样必然增加存储空间的占用量.反过来也是如此,而半边数据结构就很好的权衡了空间和时间的问题。
在构成多面体的三要素(点、边、面)中,半边数据结构仍以边为核心,但为了方便表达拓扑关系,它将一条边表示成拓扑意义上方向相反的两条“半边”,所以称为半边数据结构,其结构入图:
半边数据结构共包含六个结点:体、面、环、边、半边和顶点.半边是一连接两个顶点并具有一固定方向的线段.一系列首尾相连的半边形成一个环.半边的关系是一个边包含两个相反方向的半边,由这两个半边可以查询交于这个边的两个面。半边的含义如上图所示.半边数据结构的优点是几何元素之间的互相查询非常方便,不足之处是由于结点多占用空间较大。
半边数据结构的六个结点在C语言中被表达成“结构”.结点之间通过结构指针互相联系.这些结点描述如下:
顶点结点:顶点结点是半边数据结构中最底层的结点,实体的几何位置和尺寸最终都由顶点结点来定义.所以,顶点结点必须包含顶点的空间三维坐标值
半边结点:半边结点包含指向前趋半边和后继半边的两个指针.这两个指针形成了一个环内半边的双向链表
.半边结点还包含半边所属于的环的指针,以及半边起始顶点的指针.
. 边结点:边结点包含左右两个半边的指针,通过这两个指针可以查找该边的两个端点以及交于该边的两个面.指向前趋边和后继边的两个指针实现一个实体内边的双向链表.
环结点:因为一个环包含一系列的首尾相接的半边,故环结点是一个指向这些半边其中之一的指针,通过该指针可以查找构成该环的所有半边.环结点还包含指向前趋和后继环的两个指针,用以实现一个面内环的双向链表.另外,环结点还包含指向环所在面的指针.
面结点:因为面是由若干个环围成的内部连通的平面多边形,所以,面结点包含一个环的首指针,用来查找围成它的所有环.因为外环只有一个,为了区分内环和外环,面结点中包含指向它的外环的指针.面的前趋指针和后继指针形成一个实体内面的双向链表.面结点中还包含指向它所属于的体的指针,用来查询面所属于的实体.面所在平面的方程也是定义完整实体的重要内容,所以,面结点中包含一个四个浮点数的数组,表示其平面方程.
体结点:在半边数据结构中,体结点是各种引用的根结点.从体结点出发,可以搜索任何其它的结点.所以,体结点,包含面、边和顶点的首指针.体结点之间也是通过前趋指针和后继指针形成的双向链表来连接。
从图中可以看出,许多几何元素可以有不同的搜索路径,例如查找实体上的顶点可以有两个路径:一是体→面→环→半边→顶点;二是体→顶点
.第二个路径比第一个路径要简捷得多,用来进行实体的平移等整体操作;第一个路径一般用作局部查找。