qt项目:大恒相机实时采集,单帧采集,并且在屏幕上显示,含有保存bmp图片功能
软件框架
ui界面框架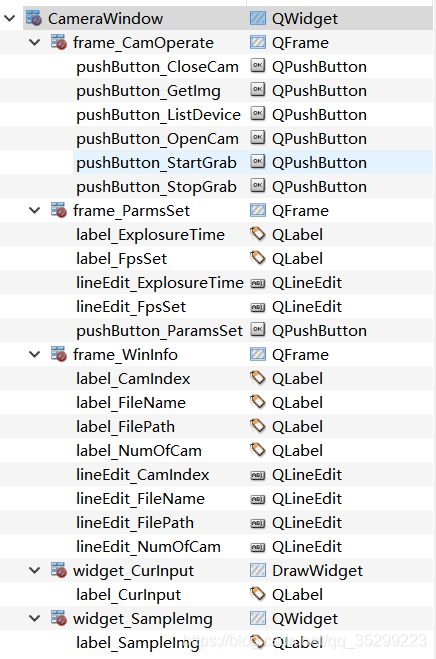
.pro文件
#-------------------------------------------------
#
# Project created by QtCreator 2019-12-20T09:41:39
#
#-------------------------------------------------
QT += core gui
QT+=charts
greaterThan(QT_MAJOR_VERSION, 4): QT += widgets printsupport
TARGET = RailMeasurement
TEMPLATE = app
# The following define makes your compiler emit warnings if you use
# any feature of Qt which as been marked as deprecated (the exact warnings
# depend on your compiler). Please consult the documentation of the
# deprecated API in order to know how to port your code away from it.
DEFINES += QT_DEPRECATED_WARNINGS
# You can also make your code fail to compile if you use deprecated APIs.
# In order to do so, uncomment the following line.
# You can also select to disable deprecated APIs only up to a certain version of Qt.
#DEFINES += QT_DISABLE_DEPRECATED_BEFORE=0x060000 # disables all the APIs deprecated before Qt 6.0.0
SOURCES += \
main.cpp \
mainwindow.cpp \
qcustomplot.cpp \
camerawindow.cpp \
mat2qtformatmethod.cpp \
cgxbitmap.cpp \
convertstring.cpp \
drawwidget.cpp
HEADERS += \
mainwindow.h \
qcustomplot.h \
camerawindow.h \
mat2qtformatmethod.h \
cgxbitmap.h \
convertstring.h \
drawwidget.h
FORMS += \
mainwindow.ui \
camerawindow.ui
# opencv环境,添加了imgproc,core,highui库
win32:CONFIG(release, debug|release): LIBS += -L$$PWD/../../cvpack/package/opencv/build/x64/vc14/lib/ -lopencv_imgproc2413
else:win32:CONFIG(debug, debug|release): LIBS += -L$$PWD/../../cvpack/package/opencv/build/x64/vc14/lib/ -lopencv_imgproc2413d
else:unix: LIBS += -L$$PWD/../../cvpack/package/opencv/build/x64/vc14/lib/ -lopencv_imgproc2413
INCLUDEPATH += $$PWD/../../cvpack/package/opencv/build/include
DEPENDPATH += $$PWD/../../cvpack/package/opencv/build/include
win32:CONFIG(release, debug|release): LIBS += -L$$PWD/../../cvpack/package/opencv/build/x64/vc14/lib/ -lopencv_core2413
else:win32:CONFIG(debug, debug|release): LIBS += -L$$PWD/../../cvpack/package/opencv/build/x64/vc14/lib/ -lopencv_core2413d
else:unix: LIBS += -L$$PWD/../../cvpack/package/opencv/build/x64/vc14/lib/ -lopencv_core2413
INCLUDEPATH += $$PWD/../../cvpack/package/opencv/build/include
DEPENDPATH += $$PWD/../../cvpack/package/opencv/build/include
win32:CONFIG(release, debug|release): LIBS += -L$$PWD/../../cvpack/package/opencv/build/x64/vc14/lib/ -lopencv_highgui2413
else:win32:CONFIG(debug, debug|release): LIBS += -L$$PWD/../../cvpack/package/opencv/build/x64/vc14/lib/ -lopencv_highgui2413d
else:unix: LIBS += -L$$PWD/../../cvpack/package/opencv/build/x64/vc14/lib/ -lopencv_highgui2413
INCLUDEPATH += $$PWD/../../cvpack/package/opencv/build/include
DEPENDPATH += $$PWD/../../cvpack/package/opencv/build/include
# 大恒sdk环境,添加了C++库和包含路径,没有添加c程序的库
unix|win32: LIBS += -L$$PWD/'../../CameraDemo/C++ SDK/lib/x64/' -lGxIAPICPPEx
INCLUDEPATH += $$PWD/'../../CameraDemo/C++ SDK/lib/x64'
DEPENDPATH += $$PWD/'../../CameraDemo/C++ SDK/lib/x64'
INCLUDEPATH += $$PWD/'../../CameraDemo/C++ SDK/inc'
DEPENDPATH += $$PWD/'../../CameraDemo/C++ SDK/inc'
CONFIG +=C++11
camerawindow.h
#ifndef CAMERAWINDOW_H
#define CAMERAWINDOW_H
#include "GalaxyIncludes.h"
#include cgxbitmap.h
#ifndef CGXBITMAP_H
#define CGXBITMAP_H
//------------------------------------------------------------------------
/*
\file GXBitmap.h
\brief 此类主要用于图像的显示和存储,图像显示和存储可以自适应黑白彩色相机,
图像存储可以存储为Bmp、Raw,对图像显示和存储进行了声明
*/
//------------------------------------------------------------------------
#include "GalaxyIncludes.h"
#include "convertstring.h"
class CGXBitmap
{
public:
//构造函数
CGXBitmap(CGXDevicePointer& objCGXDevicePointer);
//析构函数
~CGXBitmap(void);
//显示图像
void Show(CImageDataPointer& objCImageDataPointer);
//显示图像及帧率
void Show(CImageDataPointer& objCImageDataPointer,char* strDeviceSNFPS);
//图像处理后并显示图像
void ShowImageProcess(CImageProcessConfigPointer& objCfg,CImageDataPointer& objCImageDataPointer);
// 存储Bmp图像
void SaveBmp(CImageDataPointer& objCImageDataPointer,const std::string& strFilePath);
// 存储Raw图像
void SaveRaw(CImageDataPointer& objCImageDataPointer,const std::string& strFilePath);
//通过GX_PIXEL_FORMAT_ENTRY获取最优Bit位
GX_VALID_BIT_LIST GetBestValudBit(GX_PIXEL_FORMAT_ENTRY emPixelFormatEntry);
private:
//判断PixelFormat是否为8位
bool __IsPixelFormat8(GX_PIXEL_FORMAT_ENTRY emPixelFormatEntry);
//为彩色相机图像显示准备资源
void __ColorPrepareForShowImg();
//为黑白相机图像显示准备资源
void __MonoPrepareForShowImg();
//判断是否兼容
bool __IsCompatible(BITMAPINFO *pBmpInfo, uint64_t nWidth, uint64_t nHeight);
//更新Bitmap的信息
void __UpdateBitmap(CImageDataPointer& objCImageDataPointer);
//将m_pBufferRGB中图像显示到界面
void __DrawImg(BYTE* pBuffer);
//将m_pBufferRGB中图像和帧率显示到界面
void __DrawImg(BYTE* pBuffer, char* strDeviceSNFPS);
//计算宽度所占的字节数
int64_t __GetStride(int64_t nWidth, bool bIsColor);
private:
//CameraWindow* pCamw; //<显示图像窗口(控件)指针
bool m_bIsColor ; //<是否支持彩色相机
int64_t m_nImageHeight; //<原始图像高
int64_t m_nImageWidth; //<原始图像宽
BITMAPINFO *m_pBmpInfo; //
char m_chBmpBuf[2048]; //
//这里的这个mfc绘图句柄删去
//HDC m_hDC; //<绘制图像DC句柄
BYTE *m_pImageBuffer; //<保存翻转后的图像用于显示
private:
CGXBitmap& operator=(const CGXBitmap&);
CGXBitmap(const CGXBitmap&);
};
#endif // CGXBITMAP_H
convertstring.h
#ifndef CONVERTSTRING_H
#define CONVERTSTRING_H
#includedrawwidget.h
#ifndef DRAWWIDGET_H
#define DRAWWIDGET_H
#include mainwindow.h
#ifndef MAINWINDOW_H
#define MAINWINDOW_H
#include mat2qtformatmethod.h
#ifndef MAT2QTFORMATMETHOD_H
#define MAT2QTFORMATMETHOD_H
#include qcustomplot.h
camerawindow.cpp
#include "camerawindow.h"
#include "ui_camerawindow.h"
#include cgxbitmap.cpp
#include "cgxbitmap.h"
#include convertstring.cpp
#include"convertstring.h"
std::wstring StringToWString( const std::string &s)
{
std::wstring wsTmp(s.begin(), s.end());
return wsTmp;
}
bool MakeMyDirectory(const std::string &strFilePathDirctory)
{
std::wstring wDirectoryName = StringToWString(strFilePathDirctory);
LPCTSTR lpwdir = wDirectoryName.c_str();
return CreateDirectory(lpwdir, NULL);
}
drawwidget.cpp
#include "drawwidget.h"
DrawWidget::DrawWidget(QWidget *parent) : QWidget(parent)
{
}
void DrawWidget::ReSizeImg(QImage InputImg)
{
ImgToDraw=InputImg.scaled(DrawWigetSize,Qt::IgnoreAspectRatio);
}
void DrawWidget::SetSize()
{
DrawWigetSize=this->size();
}
void DrawWidget::paintEvent(QPaintEvent *event)
{
QPainter p(this);
p.drawImage(0,0,ImgToDraw);
}
main.cpp
#include "mainwindow.h"
#include "camerawindow.h"
#include mainwindow.cpp
#include "mainwindow.h"
#include mat2qtformatmethod.cpp
#include "mat2qtformatmethod.h"
namespace CV2QTFORMAT {
// NOTE: This does not cover all cases - it should be easy to add new ones as required.
QImage cvMatToQImage( const cv::Mat &inMat )
{
switch ( inMat.type() )
{
// 8-bit, 4 channel
case CV_8UC4:
{
QImage image( inMat.data,
inMat.cols, inMat.rows,
static_cast<int>(inMat.step),
QImage::Format_ARGB32 );
return image;
}
// 8-bit, 3 channel
case CV_8UC3:
{
QImage image( inMat.data,
inMat.cols, inMat.rows,
static_cast<int>(inMat.step),
QImage::Format_RGB888 );
return image.rgbSwapped();
}
// 8-bit, 1 channel
case CV_8UC1:
{
#if QT_VERSION >= QT_VERSION_CHECK(5, 5, 0)
QImage image( inMat.data,
inMat.cols, inMat.rows,
static_cast<int>(inMat.step),
QImage::Format_Grayscale8 );
#else
static QVector<QRgb> sColorTable;
// only create our color table the first time
if ( sColorTable.isEmpty() )
{
sColorTable.resize( 256 );
for ( int i = 0; i < 256; ++i )
{
sColorTable[i] = qRgb( i, i, i );
}
}
QImage image( inMat.data,
inMat.cols, inMat.rows,
static_cast<int>(inMat.step),
QImage::Format_Indexed8 );
image.setColorTable( sColorTable );
#endif
return image;
}
default:
qWarning() << "ASM::cvMatToQImage() - cv::Mat image type not handled in switch:" << inMat.type();
break;
}
return QImage();
}
QPixmap cvMatToQPixmap( const cv::Mat &inMat )
{
return QPixmap::fromImage( CV2QTFORMAT::cvMatToQImage( inMat ) );
}
}
qcustomplot.cpp
文件下载
链接:https://pan.baidu.com/s/1RqvkmACFslQxbHzkkihV_g
提取码:o09o