《PCL点云库学习&VS2010(X64)》Part 12 PCL1.72(VTK6.2.0)三角网格化(1)
Part 12 PCL1.72(VTK6.2.0)三角网格化(1)
1、GreedyProjectionTriangulation
cpp:
#include
#include
#include
#include
#include
#include
#include
int
main(int argc, char** argv)
{
// Load input file into a PointCloud with an appropriate type
pcl::PointCloud::Ptr cloud(new pcl::PointCloud);
pcl::PCLPointCloud2 cloud_blob;
pcl::io::loadPCDFile("Bunny.pcd", cloud_blob);
pcl::fromPCLPointCloud2(cloud_blob, *cloud);
//* the data should be available in cloud
// Normal estimation*
pcl::NormalEstimation n;
pcl::PointCloud::Ptr normals(new pcl::PointCloud);
pcl::search::KdTree::Ptr tree(new pcl::search::KdTree);
tree->setInputCloud(cloud);
n.setInputCloud(cloud);
n.setSearchMethod(tree);
n.setKSearch(30);
n.compute(*normals);
//* normals should not contain the point normals + surface curvatures
// Concatenate the XYZ and normal fields*
pcl::PointCloud::Ptr cloud_with_normals(new pcl::PointCloud);
pcl::concatenateFields(*cloud, *normals, *cloud_with_normals);
//* cloud_with_normals = cloud + normals
// Create search tree*
pcl::search::KdTree::Ptr tree2(new pcl::search::KdTree);
tree2->setInputCloud(cloud_with_normals);
// Initialize objects
pcl::GreedyProjectionTriangulation gp3;
pcl::PolygonMesh triangles;
// Set the maximum distance between connected points (maximum edge length)
gp3.setSearchRadius(0.05);
// Set typical values for the parameters
gp3.setMu(2.5);
gp3.setMaximumNearestNeighbors(300);
gp3.setMaximumSurfaceAngle(M_PI / 2); // 45 degrees
gp3.setMinimumAngle(M_PI / 36); // 10 degrees
gp3.setMaximumAngle(5 * M_PI / 6); // 120 degrees
gp3.setNormalConsistency(false);
// Get result
gp3.setInputCloud(cloud_with_normals);
gp3.setSearchMethod(tree2);
gp3.reconstruct(triangles);
// Additional vertex information
std::vector parts = gp3.getPartIDs();
std::vector states = gp3.getPointStates();
// Viewer
pcl::visualization::PCLVisualizer viewer("viewer");
viewer.addPolygonMesh(triangles);
viewer.spin();
// Finish
return (0);
}
注:pcl网格模型有三种可选的显示模式,分别是面片模式(Surface)显示,线框图模式(Wireframe)显示,点模式(Points)显示(貌似还有其他的形式,具体使用过依次,函数可以查相关的手册)。默认为面片模式进行显示。设置函数依次为:
void pcl::visualization::PCLVisualizer::setRepresentationToSurfaceForAllActors ( )
void pcl::visualization::PCLVisualizer::setRepresentationToWireframeForAllActors ( )
void pcl::visualization::PCLVisualizer::setRepresentationToPointsForAllActors ( )使用时,只需在可视话的时候,添加如下:
//设置网格模型显示模式
viewer->setRepresentationToSurfaceForAllActors(); //网格模型以面片形式显示
//viewer->setRepresentationToPointsForAllActors(); //网格模型以点形式显示
//viewer->setRepresentationToWireframeForAllActors(); //网格模型以线框图模式显示
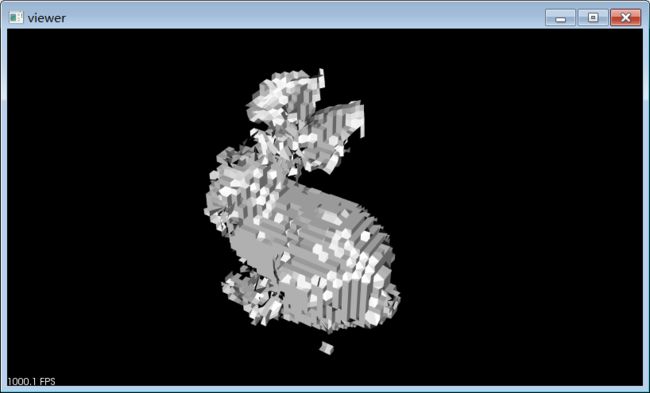
2、Grid Projection
cpp:
//#include "stdafx.h"
#include
#include
#include
#include
#include
#include
#include
#include
#include
// convenient typedefs
typedef pcl::PointXYZ PointT; // pcl Point coordinate in 3-D
typedef pcl::PointCloud PointCloud; // pcl Point cloud structure
int main(int argc, char**argv)
{
// Load input file into a PointCloud with an appropriate type
// load the original data
//PointCloud::Ptr cloud (new PointCloud); // original point cloud data
//if(readPCDFiles(cloud)==false) {
// return -1;
//}
PointCloud::Ptr cloud(new PointCloud);
pcl::io::loadPCDFile("rabbit.pcd", *cloud);
std::cout << "Loaded " << cloud->width * cloud->height << " data points from " << "pcd files!" << std::endl;
// Create a timer
clock_t start, end;
// Normal estimation*
pcl::NormalEstimation ne;
pcl::PointCloud::Ptr normals (new pcl::PointCloud);
pcl::search::KdTree::Ptr tree (new pcl::search::KdTree);
tree->setInputCloud (cloud);
ne.setInputCloud (cloud);
ne.setSearchMethod (tree);
ne.setKSearch (20);
ne.compute (*normals);
//* normals should not contain the point normals + surface curvatures
// Concatenate the XYZ and normal fields*
pcl::PointCloud::Ptr cloud_with_normals (new pcl::PointCloud);
pcl::concatenateFields (*cloud, *normals, *cloud_with_normals);
//* cloud_with_normals = cloud + normals
std::cout << "normals computed!" << std::endl;
// Create search tree*
pcl::search::KdTree::Ptr tree2 (new pcl::search::KdTree);
tree2->setInputCloud (cloud_with_normals);
// Initialize objects
pcl::GridProjection gp;
pcl::PolygonMesh mesh;
std::cout << "Computation began!" << std::endl;
gp.setInputCloud(cloud_with_normals);
gp.setSearchMethod(tree2);
gp.setResolution(0.005);// 输入立方体的边长,这个长度和输入
//点云密度有关,其值应与点与点之间的平均距离接近
//setNearestNeighborNum(2) k临近点搜索代替上述的Padding,一般2和3就可以了。
gp.setPaddingSize(3);//与setPaddingSize()函数二选一使用,不过该函数比较稳定
gp.setMaxBinarySearchLevel(11);//二分法搜索投影位置,输入为最大搜索深度
start = clock();
gp.reconstruct(mesh);
end = clock();
std::cout << "Computation ended!" << std::endl;
std::cout << (end-start)/CLOCKS_PER_SEC << "s used!" << std::endl;
// Viewer
pcl::visualization::PCLVisualizer viewer("viewer");
viewer.addPolygonMesh(mesh);
viewer.spin();
// Finish
return 0;
} 运行,发现模型精细程度并不高(其实是可调节的,将立方体的体积减小,可以得到比较好的模型):
3、Moving Least Square
cpp:
#include
#include
#include // pcl IO
#include // pcl PointT Structures
#include // pcl Display using VTK library
#include
#include
//#include
#include
#include
// convenient typedefs
typedef pcl::PointXYZ PointT;
typedef pcl::PointCloud PointCloud;
int main(int argc,char** argv)
{
PointCloud::Ptr inputCloud (new PointCloud); // original point cloud data
PointCloud::Ptr outputCloud (new PointCloud);
pcl::visualization::PCLVisualizer viewer("demo"); // visualizer
// load the original data
pcl::io::loadPCDFile("can.pcd", *inputCloud);
std::cout << "Loaded " << inputCloud->width * inputCloud->height << " data points from " << "pcd files!" << std::endl;
// Create a timer
clock_t start, end;
// MLS filter
pcl::MovingLeastSquaresOMP mls(10);
//pcl::MovingLeastSquares mls(10);
// mls,if output with normals,and mls.setComputeNormals(true),PointOutT must be normals
// search method
pcl::search::KdTree::Ptr tree(new pcl::search::KdTree);
mls.setInputCloud(inputCloud);
mls.setSearchMethod (tree);
mls.setPolynomialFit (true);
mls.setPolynomialOrder(4);
mls.setComputeNormals(false);
mls.setSearchRadius(8);
mls.setUpsamplingMethod(mls.SAMPLE_LOCAL_PLANE);
mls.setUpsamplingRadius(10);
mls.setUpsamplingStepSize(4.5);
start = clock();
mls.process(*outputCloud);
end = clock();
std::cout << "Computation ended!" << std::endl<< outputCloud->size() << "Points after MLS!"<("can_mls.pcd",*outputCloud);
viewer.setBackgroundColor (0.0, 0.0, 0.0);
pcl::visualization::PointCloudColorHandlerCustom handler(outputCloud, 255, 0, 0);
viewer.addPointCloud (outputCloud, handler, "sample cloud");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");
viewer.initCameraParameters ();
viewer.spin();
return 0;
} 运行后没有生成网格,不过点云变得密集均匀了。