进阶课程㉕丨Apollo规划技术详解——Optimization Inside Motion Planning
目录
- 动态规划
- 二次规划
- 二次规划问题的求解方法
原创 阿波君 Apollo开发者社区 2019-07-24
敲黑板,本文需要学习的知识点有
- 动态规划
- 离散空间
- 最优解
- EM算法
- KKT
- 启发式方法
在自动驾驶软件的开发中,运动规划是最核心的模块之一。它将综合感知、定位和地图等信息,规划出无人车未来一段时间(约10秒)的一系列动作指令(方向盘转角、油门、刹车等)。
运动规划的问题——目标函数(objective function)和约束(constraint)。运动规划的最终目的就是找出一条最优的运动轨迹,使其能够最小化(或者最大化)目标函数,并且不违背任何约束。
在自动驾驶中,可以将环境抽象成SL坐标系,在此坐标下的曲线光滑度是有要求的,因此需要对轨迹线进行平滑处理。
上周阿波君为大家详细介绍了「进阶课程㉔Apollo规划技术详解——Motion Planning Environment」。其中详细介绍了平滑的方法,包括对多项式进行优化,对 Bezier Spline 进行平滑处理,以及 Spline 2D 与 Spiral Path 等。
本周阿波君将继续与大家分享Apollo规划技术详解——Optimization Inside Motion Planning的相关课程。下面,我们一起进入进阶课程第25期。
完整版视频学习 请戳『阅读原文』
以下,ENJOY
约束问题的核心有三点:第一是目标函数的定义,目标函数比较清晰,对于后面的求解更有帮助。第二是约束,比如路网约束、交规、动态约束等。第三是约束问题的优化,比如动态规划、二次规划等。本节主要介绍动态规划和二次规划的基本概念,以及二次规划问题的求解方法和形式化方法。
▲运动规划的概念
动态规划
动态规划通过类似于有限元的方式,把问题从连续空间抽象成离散空间,然后在离散空间中进行优化。虽然这种方法可以逼近连续空间中的最优解,但是计算复杂度很高。针对计算时间长的问题,可以使用牛顿方法进行优化,它的收敛次数是指数平方,也叫二次收敛。
▲二次规划算法
二次规划
二次规划算法的本质是牛顿法的 Taylor 展开,但是它的求解过程涉及更复杂的情况。因为二次规划方法并不一定是处理一维问题,可能涉及更高阶求导。在实践中,二阶导数基本可以满足问题需求。
二次规划问题的求解方法
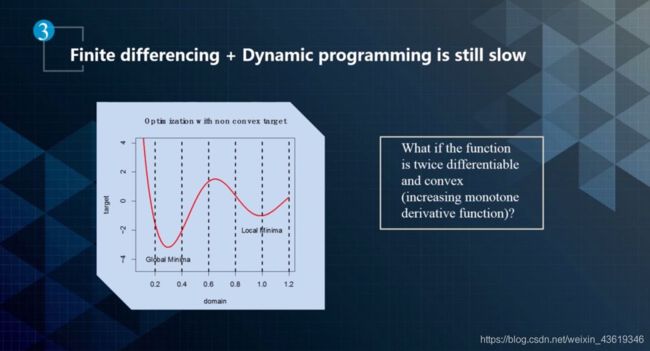
然而,牛顿法要求 locally convex 才能保证收敛,也就是导数是严格单调递增的。但是一般函数并没有这样的特性,动态规划或二次规划都无法获得全局最优解。为了解决这样的问题,通常使用启发式搜索方法。
首先通过动态规划方式对整个问题有一个粗浅的认识,然后通过二次规划进行细化。这种启发式搜索方法也是目前百度 Apollo 的 EM 算法的核心思想。这种方法和人开车的过程是一样的,通常驾驶员会先形成一个大概的指导思想,指明往什么方向开,然后再规划一条最优路径。
决策问题是一个离散空间中的优化问题,它的决定是什么?可以通过动态规划对整个空间先形成一个粗浅的认识,然后以此为启发,用二次规划求最优解。
一般来说,二次规划问题会写成一个二次函数,如下图所示。
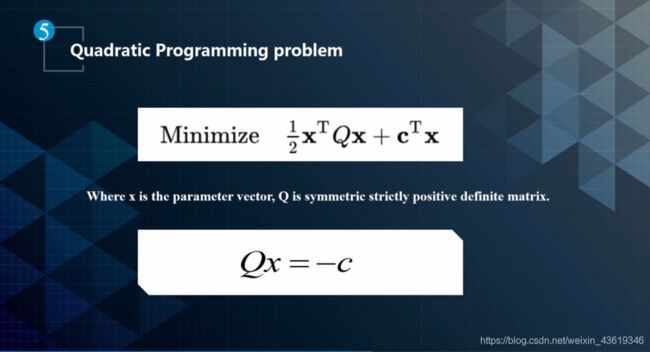
▲二次规划问题函数表达式
其中, X X X 是向量参数, Q Q Q 是一个对称的正定矩阵, c T x c^T x cTx是偏差项。对于这种没有约束的二次规划问题,只需要求导数等于0的那个点,使得 Q x = − C Qx=-C Qx=−C ,即可求解二次规划问题。这是一个线性方程组,它的求解速度是 O(N3)。
对于带约束的二次规划问题,情况就相对复杂一点,如下图所示。
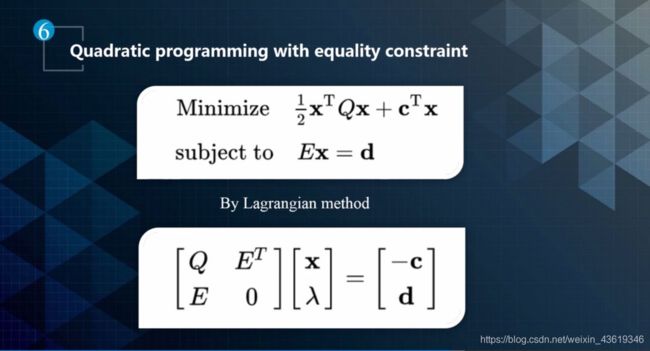
▲带约束的二次规划问题函数表达式
这种情况可以有很多种解法,其中一种把限制条件放到上面的式子中,通过换元,变成一个全新的 QP 问题求解,但是这种方法很慢。另一种方法是 Lagrangian method ,通过增加松弛变量的方式去掉约束条件,变成一个可以解决的问题。
对于不等式的约束条件,如何去求解呢?可以使用 active set method,其主要出发点是最后解,可能落到边界上,如果真的是边界最优,不等式约束就可以转化为等式约束问题求解。有人总结出求解二次规划问题的方法 KKT,其主要思想如下图所示。
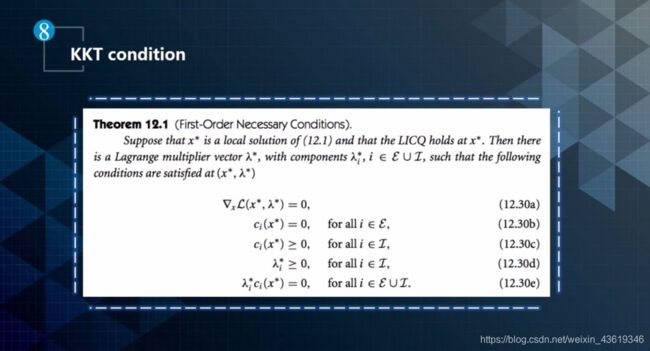
▲ KKT条件
总的来说,对于求解非线性优化问题(自动驾驶中的规划基本都是非线性的),通常就是用启发式方法来求解。先用动态规划给出一个粗略解,给出一个凸空间。然后用二次规划方法在凸空间里去寻找最优解,如下图所示。
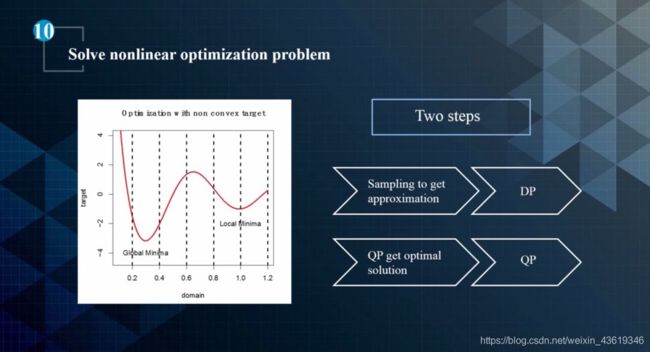
▲求解非线性优化问题
-----END-----