stm32RS485串口通信——中断接收发送数据
功能:通过PC机的串口调试助手发送数据给串口A,串口B接收到串口A发送的数据,再由串口B将接收到的数据返回给PC机的串口调试助手。
PC->串口A->串口B->PC。
实验平台:stm32f407
/*********************************************************************
本平台具有六个串口:
com1 485
com2
com3 232 需一个管脚控制DTU
com4 485
com5 调试串口 TTL
com6 485
*********************************************************************/
本实验用的的串口A对应为com1,串口B对应为com4。
本程序的设计思路:
通过PC机串口调试助手发送数据,当串口A发现有数据过来时,产生串口接收中断,把数据保存到自定义的接收缓冲区中,然后串口接收函数去缓冲区中去取数据保存在发送缓冲区中,再将数据通过串口B发送给串口调试助手。
代码:
multiple_serial.h
-
#ifndef multiple_serial_H -
#define multiple_serial_H - #define MAX_RECV_BUF_LEN (64)
-
#define MAX_RECV_DATA_MASK (0x3f) -
#define MAX_COM_COUNT (6) -
-
typedef signed char int8_t; -
typedef signed short intint16_t; -
typedef signed int int32_t; -
-
typedef unsigned char uint8_t; -
typedef unsigned short intuint16_t; -
typedef unsigned int uint32_t; -
-
#define NEXTAI_COM1_NAME"COM1" -
#define NEXTAI_COM2_NAME"COM2" -
#define NEXTAI_COM3_NAME"COM3" -
#define NEXTAI_COM4_NAME"COM4" -
#define NEXTAI_COM5_NAME"COM5" -
#define NEXTAI_COM6_NAME"COM6" -
-
enum{ -
NEXTAI_COM1_ID=1, -
NEXTAI_COM2_ID, -
NEXTAI_COM3_ID, -
NEXTAI_COM4_ID, -
NEXTAI_COM5_ID, -
NEXTAI_COM6_ID -
}; -
-
typedef struct _NEXTAI_CHANNEL_INFO_ -
{ -
uint8_t local_com_id; -
//nextai_uint8 *databuf; -
//nextai_uint16 data_read_p; -
//nextai_uint16 data_write_p; -
-
uint8_t used_flag; -
}NEXTAI_CHANNEL_INFO; -
-
/******************************************************************************* -
* local_channel_data : 通道数据结构 -
* data_recv_flag : 是否有数据flag,1表示 -
*******************************************************************************/ -
typedef struct _NEXTAI_MGR_INFO_ -
{ -
NEXTAI_CHANNEL_INFO local_channel_data[MAX_COM_COUNT]; -
uint8_t data_recv_flag; -
}NEXTAI_MGR_INFO; -
-
static NEXTAI_MGR_INFO* local_com_mgr_p=0; -
void serial_nvic_Configuration(uint8_t comID); -
static void serial_gpio_configuration(uint8_t comID); -
static void serial_rcc_configuration(uint8_t comID); -
uint8_t serial_Configuration(uint8_t*comName); -
uint8_t serial_send(uint8_t comID,uint8_t*databuf,uint32_t datalen); -
uint32_t serial_recv(uint8_t comID,uint8_t*databuf,uint32_t datalen); -
void clean_rebuff(void); -
#endif
multiple_serial.c
-
#include"multiple_serial.h" -
#include"stm32f4xx_gpio.h" -
#include"stm32f4xx_usart.h" -
#include -
-
unsigned char uart_buf[MAX_RECV_BUF_LEN]={0}; -
-
uint8_t com1_recv_buf[MAX_RECV_BUF_LEN]={0}; -
int com1_gloabl_p=0; -
int com1_read_p=0; -
-
uint8_t com4_recv_buf[MAX_RECV_BUF_LEN]={0}; -
int com4_gloabl_p=0; -
int com4_read_p=0; -
-
uint8_t com5_recv_buf[MAX_RECV_BUF_LEN]={0}; -
int com5_gloabl_p=0; -
int com5_read_p=0; -
-
uint8_t com6_recv_buf[MAX_RECV_BUF_LEN]={0}; -
int com6_gloabl_p=0; -
int com6_read_p=0; -
-
//串口gpio的配置 -
static void serial_gpio_configuration(uint8_t comID) -
{ -
GPIO_InitTypeDef GPIO_InitStructure; -
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE); -
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOC, ENABLE); -
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOD, ENABLE); -
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOF, ENABLE); -
-
/* Configure USART Tx and Rx as alternate function push-pull */ -
if(comID == NEXTAI_COM1_ID) -
{ -
GPIO_StructInit(&GPIO_InitStructure); -
-
GPIO_PinAFConfig(GPIOA, GPIO_PinSource9, GPIO_AF_USART1); -
GPIO_PinAFConfig(GPIOA, GPIO_PinSource10, GPIO_AF_USART1); -
-
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_AF; -
GPIO_InitStructure.GPIO_Speed= GPIO_Speed_100MHz; -
GPIO_InitStructure.GPIO_OType= GPIO_OType_PP; -
GPIO_InitStructure.GPIO_PuPd= GPIO_PuPd_UP; -
-
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_9; -
GPIO_Init(GPIOA,&GPIO_InitStructure); -
-
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_10; -
GPIO_InitStructure.GPIO_PuPd= GPIO_PuPd_UP; -
GPIO_Init(GPIOA,&GPIO_InitStructure); -
-
GPIO_StructInit(&GPIO_InitStructure); -
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_OUT; -
GPIO_InitStructure.GPIO_Speed= GPIO_Speed_100MHz; -
GPIO_InitStructure.GPIO_OType= GPIO_OType_PP; -
GPIO_InitStructure.GPIO_PuPd= GPIO_PuPd_UP; -
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_4; -
-
GPIO_Init(GPIOF,&GPIO_InitStructure); -
} -
elseif(comID== NEXTAI_COM4_ID) -
{ -
GPIO_StructInit(&GPIO_InitStructure); -
-
GPIO_PinAFConfig(GPIOA, GPIO_PinSource0, GPIO_AF_UART4); -
GPIO_PinAFConfig(GPIOA, GPIO_PinSource1, GPIO_AF_UART4); -
-
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_AF; -
GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz; -
GPIO_InitStructure.GPIO_OType= GPIO_OType_PP; -
GPIO_InitStructure.GPIO_PuPd= GPIO_PuPd_UP; -
-
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_1; -
GPIO_Init(GPIOA,&GPIO_InitStructure); -
-
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_0; -
GPIO_InitStructure.GPIO_PuPd= GPIO_PuPd_UP; -
GPIO_Init(GPIOA,&GPIO_InitStructure); -
-
GPIO_StructInit(&GPIO_InitStructure); -
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_OUT; -
GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz; -
GPIO_InitStructure.GPIO_OType= GPIO_OType_PP; -
GPIO_InitStructure.GPIO_PuPd= GPIO_PuPd_UP; -
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_7; -
-
GPIO_Init(GPIOA,&GPIO_InitStructure); -
} -
elseif(comID== NEXTAI_COM5_ID) -
{ -
GPIO_StructInit(&GPIO_InitStructure); -
-
GPIO_PinAFConfig(GPIOC, GPIO_PinSource12, GPIO_AF_UART5); -
GPIO_PinAFConfig(GPIOD, GPIO_PinSource2, GPIO_AF_UART5); -
-
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_AF; -
GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz; -
GPIO_InitStructure.GPIO_OType= GPIO_OType_PP; -
GPIO_InitStructure.GPIO_PuPd= GPIO_PuPd_UP; -
-
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_2; -
GPIO_Init(GPIOD,&GPIO_InitStructure); -
-
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_12; -
GPIO_InitStructure.GPIO_PuPd= GPIO_PuPd_UP; -
GPIO_Init(GPIOC,&GPIO_InitStructure); -
} -
elseif(comID== NEXTAI_COM6_ID) -
{ -
GPIO_StructInit(&GPIO_InitStructure); -
-
GPIO_PinAFConfig(GPIOC, GPIO_PinSource6, GPIO_AF_USART6); -
GPIO_PinAFConfig(GPIOC, GPIO_PinSource7, GPIO_AF_USART6); -
-
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_AF; -
GPIO_InitStructure.GPIO_Speed= GPIO_Speed_100MHz; -
GPIO_InitStructure.GPIO_OType= GPIO_OType_PP; -
GPIO_InitStructure.GPIO_PuPd= GPIO_PuPd_UP; -
-
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_6; -
GPIO_InitStructure.GPIO_PuPd= GPIO_PuPd_UP; -
GPIO_Init(GPIOC,&GPIO_InitStructure); -
-
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_7; -
GPIO_InitStructure.GPIO_PuPd= GPIO_PuPd_UP; -
GPIO_Init(GPIOC,&GPIO_InitStructure); -
-
GPIO_StructInit(&GPIO_InitStructure); -
GPIO_InitStructure.GPIO_Mode= GPIO_Mode_OUT; -
GPIO_InitStructure.GPIO_Speed= GPIO_Speed_50MHz; -
GPIO_InitStructure.GPIO_OType= GPIO_OType_PP; -
GPIO_InitStructure.GPIO_PuPd= GPIO_PuPd_UP; -
-
GPIO_InitStructure.GPIO_Pin= GPIO_Pin_8; -
GPIO_Init(GPIOC,&GPIO_InitStructure); -
} -
} -
-
//串口时钟的配置 -
static void serial_rcc_configuration(uint8_t comID) -
{ - /* Enable USART clock */
-
if(comID== NEXTAI_COM1_ID) -
{ -
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART1, ENABLE); -
} -
elseif(comID== NEXTAI_COM4_ID) -
{ -
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART4,ENABLE); -
} -
elseif(comID== NEXTAI_COM5_ID) -
{ -
RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART5,ENABLE); -
} -
elseif(comID== NEXTAI_COM6_ID) -
{ -
RCC_APB2PeriphClockCmd(RCC_APB2Periph_USART6, ENABLE); -
} -
} -
-
//配置各个串口的中断处理函数,优先级相同 -
void serial_nvic_Configuration(uint8_t comID) -
{ -
NVIC_InitTypeDef NVIC_InitStructure; -
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); -
-
if(comID== NEXTAI_COM1_ID) -
{ -
NVIC_InitStructure.NVIC_IRQChannel= USART1_IRQn; -
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1; -
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1; -
NVIC_InitStructure.NVIC_IRQChannelCmd= ENABLE; -
NVIC_Init(&NVIC_InitStructure); -
} -
elseif(comID== NEXTAI_COM4_ID) -
{ -
NVIC_InitStructure.NVIC_IRQChannel= UART4_IRQn; -
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1; -
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1; -
NVIC_InitStructure.NVIC_IRQChannelCmd= ENABLE; -
NVIC_Init(&NVIC_InitStructure); -
} -
elseif(comID== NEXTAI_COM5_ID) -
{ -
NVIC_InitStructure.NVIC_IRQChannel= UART5_IRQn; -
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1; -
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1; -
NVIC_InitStructure.NVIC_IRQChannelCmd= ENABLE; -
NVIC_Init(&NVIC_InitStructure); -
} -
elseif(comID== NEXTAI_COM6_ID) -
{ -
NVIC_InitStructure.NVIC_IRQChannel= USART6_IRQn; -
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority=1; -
NVIC_InitStructure.NVIC_IRQChannelSubPriority=1; -
NVIC_InitStructure.NVIC_IRQChannelCmd= ENABLE; -
NVIC_Init(&NVIC_InitStructure); -
} -
} -
-
-
/*串口参数配置*/ -
uint8_t serial_Configuration(uint8_t*comName) -
{ -
USART_InitTypeDef USART_InitStructure; -
uint8_t comID =0; -
-
if(strcmp(NEXTAI_COM1_NAME,(constchar*)comName)==0) -
{ -
comID= NEXTAI_COM1_ID; -
} -
elseif(strcmp(NEXTAI_COM4_NAME,(constchar*)comName)==0) -
{ -
comID= NEXTAI_COM4_ID; -
} -
elseif(strcmp(NEXTAI_COM5_NAME,(constchar*)comName)==0) -
{ -
comID= NEXTAI_COM5_ID; -
} -
elseif(strcmp(NEXTAI_COM6_NAME,(constchar*)comName)==0) -
{ -
comID= NEXTAI_COM6_ID; -
} -
-
/* System Clocks Configuration */ -
serial_rcc_configuration(comID); -
-
/* Configure the GPIO ports */ -
serial_gpio_configuration(comID); -
-
USART_InitStructure.USART_WordLength= USART_WordLength_8b; -
USART_InitStructure.USART_Parity= USART_Parity_No; -
USART_InitStructure.USART_HardwareFlowControl= USART_HardwareFlowControl_None; -
USART_InitStructure.USART_Mode= USART_Mode_Rx| USART_Mode_Tx; -
-
if(comID== NEXTAI_COM1_ID) -
{ -
USART_InitStructure.USART_BaudRate=9600; -
USART_InitStructure.USART_StopBits= USART_StopBits_1; -
USART_Init(USART1,&USART_InitStructure); -
} -
elseif(comID== NEXTAI_COM4_ID) -
{ -
USART_InitStructure.USART_BaudRate=38400; -
USART_InitStructure.USART_StopBits= USART_StopBits_1; -
USART_Init(UART4,&USART_InitStructure); -
} -
elseif(comID== NEXTAI_COM5_ID) -
{ -
USART_InitStructure.USART_BaudRate=115200; -
USART_InitStructure.USART_StopBits= USART_StopBits_1; -
USART_Init(UART5,&USART_InitStructure); -
} -
elseif(comID== NEXTAI_COM6_ID) -
{ -
USART_InitStructure.USART_BaudRate=9600; -
USART_InitStructure.USART_StopBits= USART_StopBits_1; -
USART_Init(USART6,&USART_InitStructure); -
} -
-
serial_nvic_Configuration(comID); -
-
if(comID== NEXTAI_COM1_ID) -
{ -
USART_Cmd(USART1, ENABLE); -
USART_ITConfig(USART1, USART_IT_RXNE, ENABLE); -
} -
elseif(comID== NEXTAI_COM4_ID) -
{ -
USART_Cmd(UART4, ENABLE); -
USART_ITConfig(UART4, USART_IT_RXNE, ENABLE); -
} -
elseif(comID== NEXTAI_COM5_ID) -
{ -
USART_Cmd(UART5, ENABLE); -
USART_ITConfig(UART5, USART_IT_RXNE, ENABLE); -
} -
elseif(comID== NEXTAI_COM6_ID) -
{ -
USART_Cmd(USART6, ENABLE); -
USART_ITConfig(USART6, USART_IT_RXNE, ENABLE); -
} -
-
return comID; -
} -
-
/******************************************************************************* -
* 函数名 : serial_send -
* 描 述 : 发送某个端口的数据 -
* 输 入 : comID: 串口标识号 -
databuf: 发送数据缓冲区 -
datalen: 发送数据长度 -
* 输 出 : None -
* 返 回 : None -
*******************************************************************************/ -
uint8_t serial_send(uint8_t comID,uint8_t*databuf,uint32_t datalen) -
{ -
int i =0; -
uint8_t nextai_timer =0; -
-
if(comID== NEXTAI_COM1_ID) -
{ -
GPIO_SetBits(GPIOF, GPIO_Pin_4); -
-
//清除标志位,否则第1位数据会丢失 -
USART_GetFlagStatus(USART1, USART_FLAG_TC); -
-
for(i=0; i< datalen; i++) -
{ -
//485 需添加超时检测 -
USART_SendData(USART1,databuf[i]); -
-
while(USART_GetFlagStatus(USART1, USART_FLAG_TC)== RESET) -
{ -
nextai_timer++; -
if(nextai_timer>>8) -
return0; -
} -
} -
GPIO_ResetBits(GPIOF, GPIO_Pin_4); -
} -
elseif(comID== NEXTAI_COM4_ID) -
{ -
GPIO_SetBits(GPIOA, GPIO_Pin_7); -
-
//清除标志位,否则第1位数据会丢失 -
USART_GetFlagStatus(UART4, USART_FLAG_TC); -
-
for(i=0; i< datalen; i++) -
{ -
//485 -
USART_SendData(UART4,databuf[i]);
-
while(USART_GetFlagStatus(UART4, USART_FLAG_TC)== RESET) -
{ -
nextai_timer++; -
if(nextai_timer>>8) -
return0; -
} -
} -
GPIO_ResetBits(GPIOA, GPIO_Pin_7); -
} -
elseif(comID== NEXTAI_COM5_ID) -
{ -
//清除标志位,否则第1位数据会丢失 -
USART_GetFlagStatus(UART5,USART_FLAG_TC); -
for(i=0; i< datalen; i++) -
{ - while(USART_GetFlagStatus(UART5, USART_FLAG_TC)== RESET);
-
USART_SendData(UART5,databuf[i]); -
while(USART_GetFlagStatus(UART5, USART_FLAG_TC)== RESET) -
{ -
nextai_timer++; -
if(nextai_timer>>8) -
return0; -
} -
} -
} -
elseif(comID== NEXTAI_COM6_ID) -
{ -
GPIO_SetBits(GPIOC, GPIO_Pin_8); -
-
//清除标志位,否则第1位数据会丢失 -
USART_GetFlagStatus(USART6,USART_FLAG_TC); -
for(i=0; i< datalen; i++) -
{ - //485
-
USART_SendData(USART6,databuf[i]); -
while(USART_GetFlagStatus(USART6, USART_FLAG_TC)== RESET) -
{ -
nextai_timer++; -
if(nextai_timer>>8) -
return0; -
} -
} -
GPIO_ResetBits(GPIOC, GPIO_Pin_8); -
} -
-
return datalen; -
} -
-
/******************************************************************************* -
* 函数名 : serial_recv -
* 描 述 : 接收一定长度的数据(从内存中读取数据) -
* 输 入 : comID: 串口标识号 -
databuf: 接收数据缓冲区 -
datalen: 需要接收数据长度 -
* 输 出 : None -
* 返 回 : 实际接收到的数据长度 -
*******************************************************************************/ -
uint32_t serial_recv(uint8_t comID,uint8_t*databuf,uint32_t datalen) -
{ -
uint16_t i =0, nextai_indx=0, j=0; -
NEXTAI_MGR_INFO*me= local_com_mgr_p; -
-
if((comID> NEXTAI_COM6_ID)||(comID< NEXTAI_COM1_ID)) -
return 0xffffffff; -
nextai_indx= comID- NEXTAI_COM1_ID; -
-
if(me->local_channel_data[nextai_indx].used_flag==0) -
return 0xffffffff; -
-
if(!(me->data_recv_flag&(1<< nextai_indx))) -
return 0xffffffff; -
-
if(comID== NEXTAI_COM1_ID) -
{ -
i=0; -
while(1) -
{ -
if(com1_read_p== com1_gloabl_p) -
break; -
databuf[i]= com1_recv_buf[com1_read_p]; -
com1_read_p++; -
com1_read_p&= MAX_RECV_DATA_MASK; -
i++; -
if(i>= datalen) -
break; -
for(j=0; j<100; j++); -
} -
me->data_recv_flag= me->data_recv_flag&(~(1<< nextai_indx)); -
} -
-
if(comID== NEXTAI_COM4_ID) -
{ -
i=0; -
while(1) -
{ -
if(com4_read_p== com4_gloabl_p) -
break; -
databuf[i]= com4_recv_buf[com4_read_p]; -
com4_read_p++; -
com4_read_p&= MAX_RECV_DATA_MASK; -
i++; -
if(i>= datalen) -
break; -
for(j=0; j<100; j++); -
} -
me->data_recv_flag= me->data_recv_flag&(~(1<< nextai_indx)); -
} -
-
if(comID== NEXTAI_COM5_ID) -
{ -
i=0; -
while(1) -
{ -
if(com5_read_p== com5_gloabl_p) -
break; -
databuf[i]= com5_recv_buf[com5_read_p]; -
com5_read_p++; -
com5_read_p&= MAX_RECV_DATA_MASK; -
i++; -
if(i>= datalen) -
break; -
for(j=0; j<100; j++); -
} -
me->data_recv_flag= me->data_recv_flag&(~(1<< nextai_indx)); -
} -
-
if(comID== NEXTAI_COM6_ID) -
{ -
i=0; -
while(1) -
{ -
if(com6_read_p== com6_gloabl_p) -
break; -
databuf[i]= com6_recv_buf[com6_read_p]; -
com6_read_p++; -
com6_read_p&= MAX_RECV_DATA_MASK; -
i++; -
if(i>= datalen) -
break; -
for(j=0; j<100; j++); -
} -
me->data_recv_flag= me->data_recv_flag&(~(1<< nextai_indx)); -
} -
-
return i; -
} -
-
//中断处理函数只是将发送过来的数据保存到内存 -
void USART1_IRQHandler(void) -
{ -
NEXTAI_MGR_INFO*me= local_com_mgr_p; -
-
if(USART_GetITStatus(USART1, USART_IT_RXNE)!= RESET) -
{ -
USART_ClearITPendingBit(USART1,USART_IT_RXNE); -
com1_recv_buf[com1_gloabl_p]= USART_ReceiveData(USART1); -
com1_gloabl_p++; -
com1_gloabl_p&= MAX_RECV_DATA_MASK; -
} -
-
me->data_recv_flag|=0x01; - }
-
- //void UART5_IRQHandler(void)
-
//{ -
// uint8_t temp; -
// if(USART_GetITStatus(UART5, USART_IT_RXNE)!= RESET) -
// { -
// temp= USART_ReceiveData(UART5); -
// USART_SendData(UART5,temp); -
// } -
//} -
-
void UART4_IRQHandler(void) -
{ -
NEXTAI_MGR_INFO*me= local_com_mgr_p; -
-
if(USART_GetITStatus(UART4, USART_IT_RXNE)!= RESET) -
{ -
com4_recv_buf[com4_gloabl_p++]= USART_ReceiveData(UART4); -
com4_gloabl_p&= MAX_RECV_DATA_MASK; -
} -
-
me->data_recv_flag|=0x08; -
} -
-
void UART5_IRQHandler(void) -
{ -
NEXTAI_MGR_INFO *me = local_com_mgr_p; -
-
if(USART_GetITStatus(UART5, USART_IT_RXNE) != RESET) -
{ -
com5_recv_buf[com5_gloabl_p++] = USART_ReceiveData(UART5); -
com5_gloabl_p &= MAX_RECV_DATA_MASK; -
} -
-
me->data_recv_flag |= 0x10; -
} -
-
void USART6_IRQHandler(void) -
{ -
NEXTAI_MGR_INFO*me= local_com_mgr_p; -
-
if(USART_GetITStatus(USART6, USART_IT_RXNE)!= RESET) -
{ -
com6_recv_buf[com6_gloabl_p++]= USART_ReceiveData(USART6); -
com6_gloabl_p&= MAX_RECV_DATA_MASK; -
} -
-
me->data_recv_flag|=0x20; -
}
main.c
-
#include"multiple_serial.h" -
#include"stm32f4xx_gpio.h" -
#include"stm32f4xx_usart.h" -
#include -
#include -
-
int main() -
{ -
char*COM1="COM1"; -
char*COM4="COM4"; -
-
serial_Configuration((uint8_t*)COM1); -
serial_Configuration((uint8_t*)COM4); -
-
extern unsigned char uart_buf[64]; -
-
int i=0,j; -
-
unsigned char printf_buf[128]={0}; -
-
uint8_t flag=0; -
-
while(1) -
{ -
flag= serial_recv(1, uart_buf,64); -
//延时让serial_recv函数接收完PC机串口调试助手发来的全部数据 -
for(i=10000;i!=0;i--) -
for(j=3000;j!=0;j--); -
-
if(flag>0) -
{ -
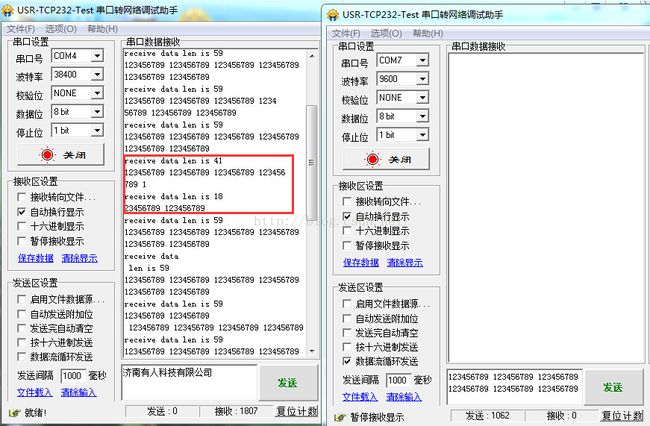
sprintf((char*)printf_buf,"receive data len is %d\n", flag);//将字符串写入printf_buf中 -
serial_send(4, printf_buf, strlen((char*)printf_buf));//发送printf_buf中的内容到串口 -
-
serial_send(4, uart_buf, flag+1); -
-
} -
-
} -
-
return 0; -
}
测试结果如下图所示:
刚才改了下程序:
main.c
-
#include"multiple_serial.h" -
#include"stm32f4xx_gpio.h" -
#include"stm32f4xx_usart.h" -
#include -
#include -
-
int main() -
{ -
char*COM1="COM1"; -
char*COM4="COM4"; -
char*COM5="COM5"; -
char*COM6="COM6"; -
-
serial_Configuration((uint8_t*)COM1); -
serial_Configuration((uint8_t*)COM6); -
extern unsigned char uart_buf[64]; - int i=0,j;
-
unsigned char printf_buf[128]={0}; - uint8_t flag=0;
-
-
while(1) -
{ -
//从串口调试助手发送数据,串口A接收到数据后产生中断,在中断函数中将数据保存到com6_recv_buf中, -
//然后通过serial_recv函数将数据从com6_recv_buf中保存到接收uart_buf中,最后调用serial_send回传给串口调试助手。 -
flag= serial_recv(1, uart_buf,64); -
-
if(flag>0) -
{ -
serial_send(4, uart_buf, flag+1); -
} -
} -
-
return0; -
}
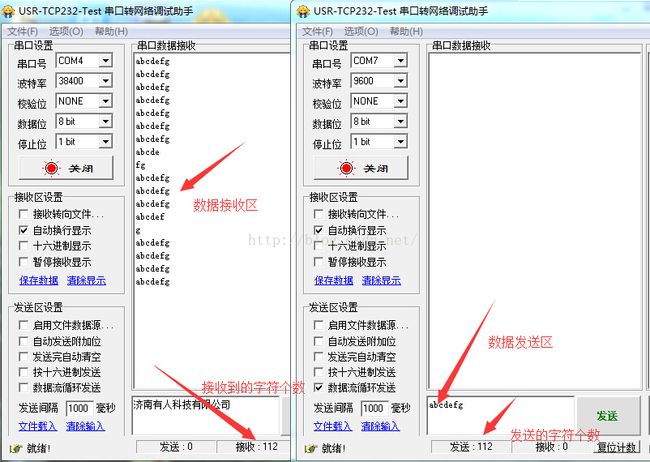
测试结果如下图所示:
通过发送和接收的数据对比,发现程序设计的还是比较稳定的,没有出现数据丢失的现象。