V-rep是如何通过remoteAPI的交互,只需要一行代码simExtRemoteApiStart()。
以ABB为例,在新场景中直接从现有模型中拖出abb的模型。
1.1 ABB 机械臂
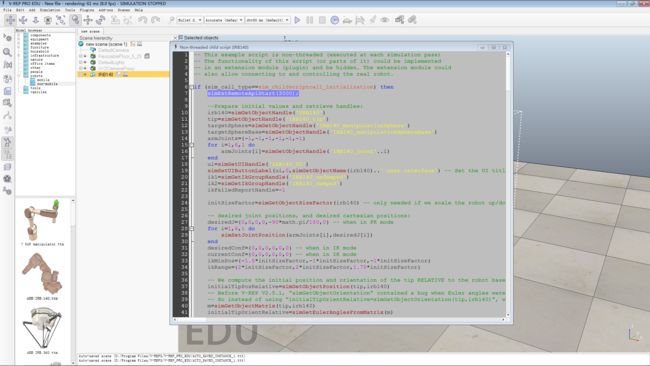
在Scene窗口中Abb元素的右边有一个小本子的标志,双击打开编译脚本。
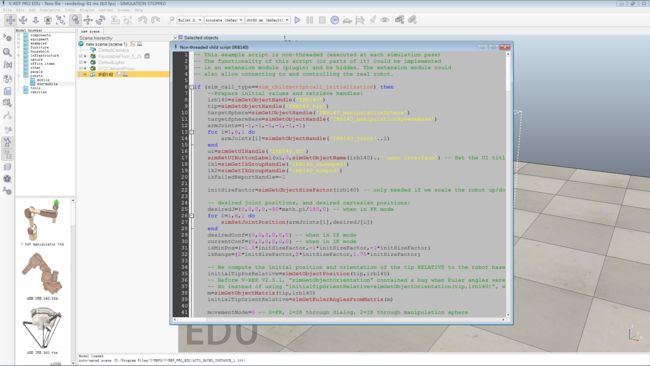
1.2 程序界面
里面的代码已经编译好啦,V-rep的代码示弱语言,内容主要分为几大块,以if(sim_call_type == xxxx)then .... end 为分界。
表示仿真开始,仿真中,仿真暂停,仿真结束等等不同的状态。在不同的状态里写入相应的指令就好啦。
而初始化调用RemoteApi需要在初始化过程中,调用simExtRemoteApiStart(3000)。 其中3000表示端口号。端口号只要不与已有进程冲突就可以了,具体可以查询端口使用的列表。
1.3 添加RemoteApi
这里我们通过C++连接V-rep。首先我们先找到v-rep的根目录里的programming引入include和RemoteApi两个文件夹。想了解更多可以以bubbleRobClient中的例程为例。
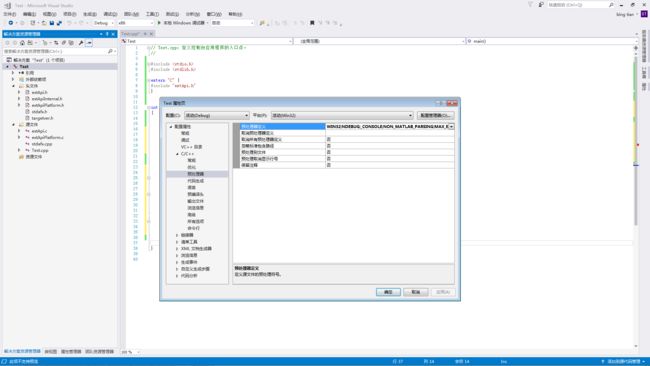
我们这里在VS中创建一个自己的C++控制台程序。
这里要添加预处理:
WIN32
NDEBUG
_CONSOLE
NON_MATLAB_PARSING
MAX_EXT_API_CONNECTIONS=255zasda
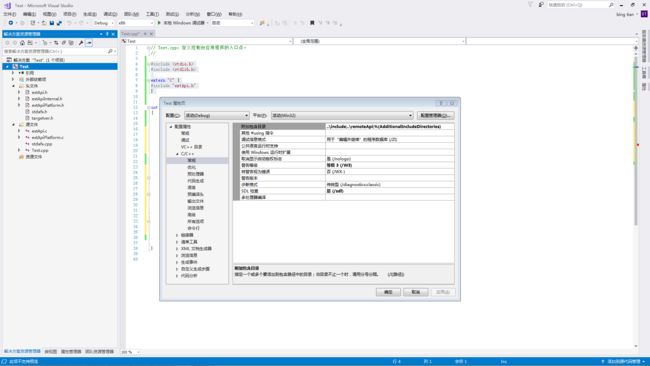
注意添加附加包含目录,要包括inclue和remoteapi两个文件夹,添加头文件
#include
#include
extern "C" {
#include "extApi.h"
}
其中Port是之前定下的端口号:3000。
使用simxStart函数开启RemoteApi的通信。返回值int,判断是否能够连接。
使用simxGetObjectHandle函数添加需要读取的ObjectHandle。
使用simxGetObjectPosition函数获得handle的位置信息。
例程如下:
#include "stdafx.h"
#include
#include
extern "C" {
#include "extApi.h"
}
int main()
{
int Port = 3000;
int PositionControlHandle;
simxChar* Adresse = "127.0.0.1";
float position[3];
int clientID = simxStart(Adresse, Port, true,true,2000,5);
if (clientID != -1)
{
printf("V-rep connected.");
extApi_sleepMs(300);
while (simxGetConnectionId(clientID) != -1)
{
simxGetObjectHandle(clientID,"IRB140_manipulationSphere", &PositionControlHandle, simx_opmode_oneshot);
simxGetObjectPosition(clientID,PositionControlHandle,-1,position, simx_opmode_oneshot);
printf("(%f,%f,%f)\r\n",position[0],position[1],position[2]);
}
simxFinish(clientID);
}
else {
printf("V-rep can't be connected.");
extApi_sleepMs(300);
}
return 0;
}
更多函数用法及参数见v-rep使用手册,RemoteApi中C++部分及Server部分介绍。