我给妹子讲了一晚上的RTOS Task的原理
本文首发于公众号“嵌入式软件实战派”,关注获得更多精品。
师兄,不好意思,又打扰你一下。”
此时的我刚解了一个bug,正闭目养神缓解一下疲惫的精神。听到妹子在叫我,忽然又精神百倍了。
“没事,你说。”
“自从你上次给我讲解了RTOS的一些概念原理,我没那么困惑了,我也查阅了很多资料,但是我还有些关于'Task'的疑问……”
“找个时间我再给你详细讲解下吧。”热情的我没等她说完我就答应她了。
于是,我约她在晚上……我当时又恰恰只有晚上比较有空(我真不是故意的) 。
。
顺着上次没讲完的问题点(见《妹子要我教她学RTOS》),这次打算给她讲个透彻。因为我们项目用了FreeRTOS,以下内容也是基于FreeRTOS做讲解。
多任务概念
内核是操作系统的核心组件,像Linux或者Windows,用户可以运行多个程序,多个程序又像是在同时运行。每个程序都可以是一个或者多个Task(或者Thread)。可以处理多个Task的系统,我们称其为多任务处理。在程序设计上,将软件应用根据不同功能分别设计成多个Task,然后实现其内部交互,非常方便。
![]()
上面提到多个程序像是同时运行的,真的可以同时运行?
![]()
程序看起来像同时运行的
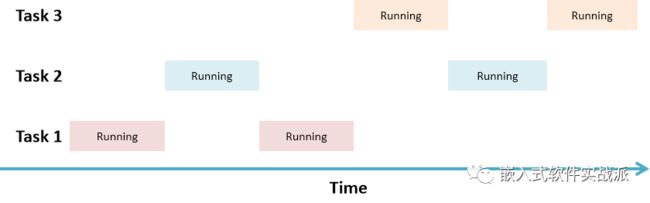
实际上程序是分时间片运行的
任务调度
此时,妹子很好奇,既然多个程序不是真的同时运行,系统是怎么实现按时间片运行的?
以下,我就给她讲解了“任务调度”的概念。
1. 调度策略
调度器或者说调度程序,是内核的一部分,它负责确定在任何特定时间应执行哪个任务。内核可以在任务生命周期中挂起(Suspend)许多任务,然后在适当的时候恢复并执行(Resume)任务。
这里就涉及到一个调度算法了,它是在任何时刻决定执行哪个任务的算法。用户可以根据任务的需要给每个任务分配或者设定其运行时刻。系统中的任务,不仅自己会挂起,用户也可以决定一个任务什么时候让其挂起,然后系统就会去寻找下一个就绪的任务运行。
以下,举例说明任务切换过程。
![]()
-
在1处Task 1在运行,运行到2处,被系统挂起了;
-
在第3处,系统切换到Task 2,第4处在运行;
-
第5处,Task 2被挂起,同时第6处是恢复Task 1运行;
-
第7处,挂起Task 1,在第8处切换到Task 3运行;
-
以此类推,第9/10处分别是Task 2和Task 3在运行。
以上,讲到的挂起,就有可能是用户设置让Task挂起(即Sleep或休眠),系统就将运行权交给其他的Task,也有可能是因为另外一个Task优先级更高,逼迫之前的Task挂起,即发生了抢占行为。
“师兄,以上过程比较容易理解,但是这Task是怎么切换走的,又是怎么切换回来的?”
细心的妹子还是提出了这个细节疑问。同时我也毫不吝啬地赞扬她提了个好问题。
2. 上下文
这里就涉及到另一个概念了——上下文切换。
程序在运行的时候,会用到CPU系统的资源,例如寄存器、栈空间等等。当前用到的这些资源,我们称之为上下文(Context)。
举例说明,当一个Task程序在运行1+1运算的时候,在CPU运行应该像这样的:

这里面的资源就是当前Task运行时的Context。
妹子是个优秀的妹子,她的问题总是直击要害。我从她犀利的眼神中可以看出,对于我讲解的过程她是理解的,同时还具有打破砂锅问到底的程序员特质。
这次她问的是,“如果一个task在运行计算这个1+1的程序时,被系统打断了或挂起了,恢复回来怎么继续?例如,mov R1, 1此处被打断了,系统切换到另一个task了,也有可能用这个R1和R2寄存器,并且这些寄存器在cpu上只有一份,系统切换不会搞乱套了么?”
看得出,她期待我给她讲解Context切换的过程。于是,我就准备了个例子,系统在Task A和Task B之间切换的过程。
1. 假设Task A是在当前运行的任务
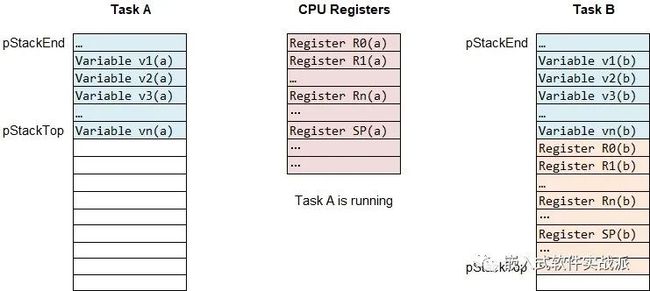
2. 保存Task A的Context
![]()
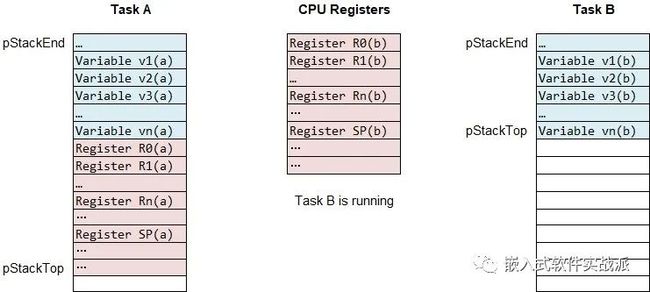
3. 恢复或者加载Task B的Context
![]()
4. 运行Task B
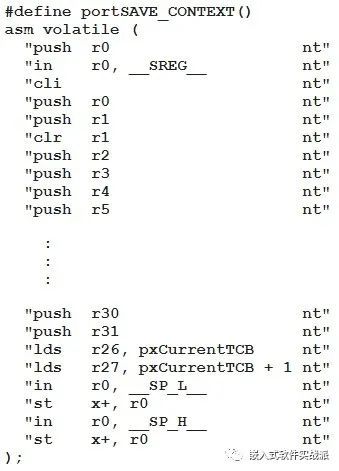
以上提到了个保存Context和恢复Context, 这个是怎么实现的呢?
我从FreeRTOS.org官网找到了个例子(针对AVR的),不同内核的IC实现还不一样,和具体的寄存器组有关,和编译环境有关。另外,这两个函数运行要求越快越好,这个会影响系统任务切换的性能,所以,这俩函数一般都是用汇编实现的。
![]()
对于这个例子的代码实现我在这里就不讲解了(我也没给妹子讲解这些细节,对于RTOS入门可以暂时跳过这个内容),有兴趣的可以参考FreeRTOS官网,里面有解释。
任务状态
上文提到了Task的状态,妹子问,“Task是不是只有挂起和运行两个状态?”突然,我觉得这个问题有点难回答Yes or No。她静静地看着我,一时语塞,我的答案总是姗姗来迟。
我勇敢果断地说了声“是”。然后还给她解释了下面一大堆内容。
实际上,确实可以认为一个Task只有运行和不运行(或者叫挂起)状态。

当任务处于运行状态时,处理器将执行任务的代码。 当任务处于“未运行”状态时,该任务处于休眠状态,其状态已保存,准备好在计划程序下次决定进入“运行”状态时恢复执行。 当任务恢复执行时,它会从上一次离开运行状态之前要执行的指令开始执行。
FreeRTOS.org
但是呢,“幸福总是相似的,而不幸却又各不一样。”Running只有一个,而Not Running却又各不相同。就FreeRTOS来说,Not Running分好几种状态:
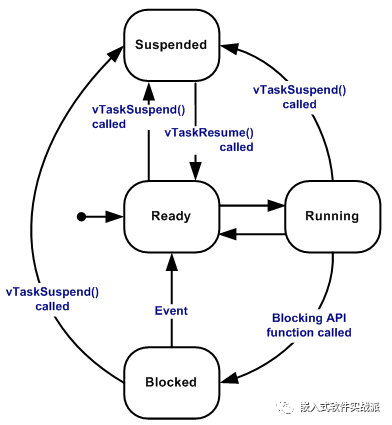
以下根据FreeRTOS官网内容解释下:
-
Running
实际执行任务时,据说它处于Running状态。当前正在使用处理器。如果运行RTOS的处理器只有一个内核,则在任何给定时间只能有一个任务处于“运行”状态。
-
Ready
Ready任务是那些能够执行的任务(它们不处于Blocked或Suspended状态),但当前却不执行,因为具有相同或更高优先级的其他任务已经处于Running状态。
-
Blocked
如果任务当前正在等待临时事件或外部事件,则称该任务处于Blocked状态。例如,如果任务调用vTaskDelay(),它将一直阻塞(置于Blocked状态),直到延迟时间到期为止–这是一个时间事件。任务也可以阻塞以等待队列,信号量,事件组,通知或信号量事件。处于Blocked状态的任务通常有一个“超时”时间段,此后该任务将超时并被解除阻止,即使未发生任务正在等待的事件也是如此。
处于Blocked状态的任务不使用任何处理时间,并且不能选择进入Running状态。
-
Suspended
与处于Blocked状态的任务一样,处于Suspended状态的任务无法选择进入Running状态,但是处于Suspended状态的任务没有超时。相反,只有在分别通过vTaskSuspend()和xTaskResume()API调用明确命令这样做时,任务才进入或退出Suspended状态。
怎么实现几个task轮流执行呢,直接给他们写个死循环行不行。
void task1(void)
{
while(1)
{
// doing something
}
}
void task2(void)
{
while(1)
{
// doing something
}
}这个问题,我让妹子想了好一会。她犹犹豫豫回答说不行。然后又向我投来期待的眼神。
我不慌不忙地给她说,确实不行,因为优先级高的,根本就没给机会优先级低的任务运行。那么,怎么做呢?
void task1(void)
{
while(1)
{
// doing something
vTaskDelay(10);
}
}
void task2(void)
{
while(1)
{
// doing something
vTaskDelay(10);
}
}最简单直接的办法,就是给每个Task一个delay,即让其没运行一次循环就睡一会,把机会留给其他任务。但是,这里有点死板,每次都要等10(ms)?能不能有事情就执行,没事情就休息呢?
答案是有的。这要用到信号量或者事件组这些东西了。在此暂不展开讨论,怕扯太远了,妹子会一路问下去。
讲到这里,妹子基本上理解我说的“是”的回答的含义了……但是这上面又提到了很多新概念,如信号量、队列等等。也许我只能再约她在另外一个晚上了(讲解RTOS概念![]() )。
)。
任务优先级
这里有必要提一下的是,这个任务的优先级,即Priority。其实也没很高深的知识,我是想让妹子知道,在人类创建RTOS的世界,任务并非个个平等的。因为人类有各种喜好或要求,总是希望有些任务设计成紧急处理的,其应该拥有高优先级。如果你要设计一个无关紧要的任务为最高优先级,那它只会“占着茅坑不拉屎”。Oh,我不能跟妹子做这么恶心的比喻。
话说回来,如果你认为你的RTOS是平等的大同世界,你可以设计每个任务的优先级一样,让他们佛系切换,我想bug也会少很多。但是你要掂量着,这是不是你想要的设计功能。当然,也有非抢占式的RTOS,其只能是等一个任务运行完才能轮到另一个任务的。我们在此不讨论这种情形,这种OS也很少使用。
好了,这个章节,无非是想告诉你,优先级的配置,是很重要的,影响功能体验甚至性能。
任务间通信
讲了那么多,回到应用来,我们将许多应用设计成多个不同的Task,它们是怎么交互或者通信的?
聪明的我,没等妹子反应过来,我就给她解释了。
一般情况下,RTOS都会提供一个叫mailbox的东西给两个Task之间通信,可以简单理解为,异地恋双方通过写信交流……(呃,虽然我好想打探妹子有没有男朋友,但是这个比喻我只能生硬地讲到这了。)
引用FreeRTOS官网里面的图来解释:

很明显,FreeRTOS的这个mailbox实际上就是个队列(First In First Out, FIFO),此处我没跟妹子讲解这个结构,而推荐了个文章《图解栈(Stack)与队列(Queue)》给她看。
她问,“不用mailbox,还有没有其他方法,例如直接共享全局变量,如果两个Task传输大量数据,mailbox不是很好吧……”
妹子总是这么好学,我又给她讲解了处理mailbox以外的方式。例如她提的全局变量。我笑着点了点头,但她不是很满意,似乎觉得过于简单了。因为,我们之前讲到过,Context切换时有备份的,但这个全局变量,是没有备份的。假如两个Task都同时更改这全局变量,会发生什么?假如一个Task正在更改变量,另一个Task却正在读取这个变量又会怎样?
我很想给她做以下这个比喻,但是始终没有。
“我跟你在讲解RTOS的知识,有时候需要用笔在纸上画一些图示来说明问题,你也会用笔来把问题指出来。如果只有一支笔,在讨论激烈的时候,我们可能会同时伸手去拿这支笔,然后……”
我很想出这个bug![]() ,可项目不能出啊。言归正传,以上这样做是会出问题的,而且问题会变得很复杂,bug也不好找。
,可项目不能出啊。言归正传,以上这样做是会出问题的,而且问题会变得很复杂,bug也不好找。
怎么办?加锁啊。一个task在用这个变量的时候,另一个task就只能静静地待着。RTOS有锁?锁是啥东西?你姑且认为信号量可以实现这个锁,后续再详细讨论。好了,先给你安利一个文章《我在马路上遇到一个死锁问题》。
空任务
好像,这个RTOS的Task概念基本讲完了,但是问题妹子又提问了,“如果所有我们定义的Task都在挂起,那系统在干嘛?”我听得出来,就好像她天真可爱地问“如果所有人都睡觉了,这个世界是不是都在睡觉?”
设计RTOS的,就好像在设计这个世界,世界怎么会睡觉呢?天和地怎么会睡觉呢?我跟她说“天行健,君子以自强不息!”说的我有点豪气,又有点装逼,似乎比喻不怎么恰当。慌忙地解释,RTOS还隐藏着另外一个Task——IDLE_Task。它拥有最低优先级,与世无争,就像水一样。然后,我顺口念出了一句:
“上善若水。水善利万物而不争,处众人之所恶, 故几于道。”
老子
我又怕装逼装过头了,慢慢地跟她解释这个IDLE Task,它的优先级是最低的,只有其他task不运行的时候,它才运行。
但是,你知不知道,这个IDLE Task在系统运行中,运行时间或次数最多的,正所谓“色即是空,空即是色”……
关注“嵌入式软件实战派”,我给你讲更多关于我和她RTOS的故事。
