点云项目学习一:PCL+opencv环境配置与Kinect获得深度信息
点云项目学习一:PCL+opencv环境配置与Kinect获得深度信息
- 环境配置
- 获得深度信息
- 运行结果
- 预留任务
目前第一篇博客,记录一下创新项目的学习进程。本项目基于Kinect2.0采集室内场景深度信息,在Pointnet框架中进行学习,实现识别的效果。
环境配置
我们的环境配置是:win10+vs2019+opencv+PCL1.10.1+Kinect v2
包含目录:
我直接把opencv+Kinect+PCL都贴上来了,读者请按照自己的地址。
C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\inc
D:\PCL 1.10.1\3rdParty\VTK\include\vtk-8.2
D:\PCL 1.10.1\3rdParty\Qhull\include
C:\Program Files\OpenNI2\Include
D:\PCL 1.10.1\3rdParty\FLANN\include
D:\PCL 1.10.1\3rdParty\Eigen\eigen3
D:\PCL 1.10.1\3rdParty\Boost\include\boost-1_72
D:\PCL 1.10.1\include\pcl-1.10
库目录:
C:\Program Files\Microsoft SDKs\Kinect\v2.0_1409\Lib\x64
D:\PCL 1.10.1\lib
D:\PCL 1.10.1\3rdParty\VTK\lib
D:\PCL 1.10.1\3rdParty\Qhull\lib
C:\Program Files\OpenNI2\Lib
D:\PCL 1.10.1\3rdParty\FLANN\lib
D:\PCL 1.10.1\3rdParty\Boost\lib
附加依赖项:
kinect20.lib
opencv_world412d.lib
PCL的就不列了,主要分得清release和debug就好了,太多了,贴一个其他博主写的教程:
vs2019+PCL配置
另:opencv的包含目录和库目录我按照一位暴力博主的方式永久配置了,每次新建项目就不需要重新导入了。
opencv永久配置
获得深度信息
我也是一边查csdn和github找各路博主搜来的代码,终于跑成功了几个:
#include "kinect.h"
#include 代码来源
下面开始分析代码:
Eigen是一个高层次的C ++库,有效支持线性代数,矩阵和矢量运算,数值分析及其相关的算法。我们主要用它的MatrixXd
如:Matrix3d:表示元素类型为double大小为3*3的矩阵变量
#include "kinect.h"
#include <iostream>
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
using namespace cv;
using namespace std;
头文件没啥好说的
// 获取Kinect设备,没有就返回failed
IKinectSensor* m_pKinectSensor;//定义类指针
HRESULT hr;
hr = GetDefaultKinectSensor(&m_pKinectSensor);//获取感应器
if (FAILED(hr))
{
return hr;
}
Kinect文档
IKinectSensor就是一个类,代表你的传感器设备,有一些库函数。
HRESULT为函数返回值(一种数据类型)
GetDefaultKinectSensor()这个函数用来获取预设的感应器,括号里填自己的预设名字就可以,然后就可以设置传感器的状态。
eg:
GetDefaultKinectSensor(&IKinectSensor); //获取感应器
IKinectSensor->Open(); //打开感应器
IMultiSourceFrameReader* m_pMultiFrameReader = NULL;
//表示多源框架的阅读器
if (m_pKinectSensor)
{
hr = m_pKinectSensor->Open();
if (SUCCEEDED(hr))
{
// 获取多数据源到读取器
hr = m_pKinectSensor->OpenMultiSourceFrameReader(
FrameSourceTypes::FrameSourceTypes_Color |
FrameSourceTypes::FrameSourceTypes_Infrared |
FrameSourceTypes::FrameSourceTypes_Depth,
&m_pMultiFrameReader);
//打开一个新的流阅读器,获取颜色,红外帧,深度
}
}
获取了一些数据
if (!m_pKinectSensor || FAILED(hr))//再来一次判断罢了
{
return E_FAIL;
}
// 三个数据帧及引用
IDepthFrameReference* m_pDepthFrameReference = NULL;//对实际深度框架的引用
IColorFrameReference* m_pColorFrameReference = NULL;
IInfraredFrameReference* m_pInfraredFrameReference = NULL;
IDepthFrame* m_pDepthFrame = NULL;//表示一个帧,其中每个像素代表该像素看到的最近物体的距离。
IInfraredFrame* m_pInfraredFrame = NULL;
IColorFrame* m_pColorFrame = NULL;
// 三个图片格式
Mat i_rgb(1080, 1920, CV_8UC4); //注意:这里必须为4通道的图,Kinect的数据只能以Bgra格式传出
Mat i_depth(424, 512, CV_8UC1);
Mat i_Infrared(424, 512, CV_8UC1);
Mat i_ir(424, 512, CV_16UC1);
Mat i_depthToRgb(424, 512, CV_8UC4);
//16位无符号整型
UINT16* depthData = new UINT16[424 * 512];
UINT16* InfraredData = new UINT16[424 * 512];
CameraSpacePoint* m_pCameraCoordinates = new CameraSpacePoint[512 * 424];//相机空间中的3D位置
ColorSpacePoint* m_pColorCoordinates = new ColorSpacePoint[512 * 424];//色彩空间中的2D位置
IMultiSourceFrame* m_pMultiFrame = nullptr;//表示KinectSensor中的多源框架
定义了一些东西。
while (true)
{
// 获取新的一个多源数据帧
hr = m_pMultiFrameReader->AcquireLatestFrame(&m_pMultiFrame);
if (FAILED(hr) || !m_pMultiFrame)
{
continue;
}
// 从多源数据帧中分离出彩色数据,深度数据和红外数据
if (SUCCEEDED(hr))
hr = m_pMultiFrame->get_ColorFrameReference(&m_pColorFrameReference);
if (SUCCEEDED(hr))
hr = m_pColorFrameReference->AcquireFrame(&m_pColorFrame);
if (SUCCEEDED(hr))
hr = m_pMultiFrame->get_DepthFrameReference(&m_pDepthFrameReference);
if (SUCCEEDED(hr))
hr = m_pDepthFrameReference->AcquireFrame(&m_pDepthFrame);
if (SUCCEEDED(hr))
hr = m_pMultiFrame->get_InfraredFrameReference(&m_pInfraredFrameReference);
if (SUCCEEDED(hr))
hr = m_pInfraredFrameReference->AcquireFrame(&m_pInfraredFrame);
// color拷贝到图片中
UINT nColorBufferSize = 1920 * 1080 * 4;
if (SUCCEEDED(hr))
hr = m_pColorFrame->CopyConvertedFrameDataToArray(nColorBufferSize, reinterpret_cast<BYTE*>(i_rgb.data), ColorImageFormat::ColorImageFormat_Bgra);
if (SUCCEEDED(hr))
{
hr = m_pInfraredFrame->CopyFrameDataToArray(424 * 512, InfraredData);
for (int i = 0; i < 512 * 424; i++)
{
// 0-255深度图,为了显示明显,只取深度数据的低8位
BYTE intensity = static_cast<BYTE>(InfraredData[i] % 256);
reinterpret_cast<BYTE*>(i_Infrared.data)[i] = intensity;
}
}
// depth拷贝到图片中
if (SUCCEEDED(hr))
{
hr = m_pDepthFrame->CopyFrameDataToArray(424 * 512, depthData);
for (int i = 0; i < 512 * 424; i++)
{
// 0-255深度图,为了显示明显,只取深度数据的低8位
BYTE intensity = static_cast<BYTE>(depthData[i] % 256);
reinterpret_cast<BYTE*>(i_depth.data)[i] = intensity;
}
ICoordinateMapper* m_pCoordinateMapper = NULL;
hr = m_pKinectSensor->get_CoordinateMapper(&m_pCoordinateMapper);
HRESULT hr = m_pCoordinateMapper->MapDepthFrameToColorSpace(512 * 424, depthData, 512 * 424, m_pColorCoordinates);
if (SUCCEEDED(hr))
{
for (int i = 0; i < 424 * 512; i++)
{
ColorSpacePoint p = m_pColorCoordinates[i];
if (p.X != -std::numeric_limits<float>::infinity() && p.Y != -std::numeric_limits<float>::infinity())
{
int colorX = static_cast<int>(p.X + 0.5f);
int colorY = static_cast<int>(p.Y + 0.5f);
if ((colorX >= 0 && colorX < 1920) && (colorY >= 0 && colorY < 1080))
{
i_depthToRgb.data[i * 4] = i_rgb.data[(colorY * 1920 + colorX) * 4];
i_depthToRgb.data[i * 4 + 1] = i_rgb.data[(colorY * 1920 + colorX) * 4 + 1];
i_depthToRgb.data[i * 4 + 2] = i_rgb.data[(colorY * 1920 + colorX) * 4 + 2];
i_depthToRgb.data[i * 4 + 3] = i_rgb.data[(colorY * 1920 + colorX) * 4 + 3];
}
}
}
}
imshow("rgb2depth", i_depthToRgb);
if (waitKey(1) == VK_ESCAPE)
break;
// 显示
/*imshow("rgb", i_rgb);
if (waitKey(1) == VK_ESCAPE)
break;*/
imshow("depth", i_depth);
if (waitKey(1) == VK_ESCAPE)
break;
imshow("Infrared", i_Infrared);
if (waitKey(1) == VK_ESCAPE)
break;
if (SUCCEEDED(hr))
{
HRESULT hr = m_pCoordinateMapper->MapDepthFrameToCameraSpace(512 * 424, depthData, 512 * 424, m_pCameraCoordinates);
}
if (SUCCEEDED(hr))
{
if (waitKey(100) == VK_SPACE)
{
SYSTEMTIME st;
GetLocalTime(&st);
char output_file[32];
char output_RGB[32];
char output_depth[32];
char output_ir[32];
sprintf_s(output_file, "%4d-%2d-%2d-%2d-%2d-%2d.txt", st.wYear, st.wMonth, st.wDay, st.wHour, st.wMinute, st.wSecond);
sprintf_s(output_RGB, "%4d-%2d-%2d-%2d-%2d-%2d-rgb.png", st.wYear, st.wMonth, st.wDay, st.wHour, st.wMinute, st.wSecond);
sprintf_s(output_depth, "%4d-%2d-%2d-%2d-%2d-%2d-depth.png", st.wYear, st.wMonth, st.wDay, st.wHour, st.wMinute, st.wSecond);
sprintf_s(output_ir, "%4d-%2d-%2d-%2d-%2d-%2d-ir.png", st.wYear, st.wMonth, st.wDay, st.wHour, st.wMinute, st.wSecond);
imwrite(output_RGB, i_rgb);
imwrite(output_depth, i_depth);
imwrite(output_ir, i_Infrared);
FILE* file = fopen(output_file, "w");
for (int i = 0; i < 512 * 424; i++)
{
CameraSpacePoint p = m_pCameraCoordinates[i];
if (p.X != -std::numeric_limits<float>::infinity() && p.Y != -std::numeric_limits<float>::infinity() && p.Z != -std::numeric_limits<float>::infinity())
{
float cameraX = static_cast<float>(p.X);
float cameraY = static_cast<float>(p.Y);
float cameraZ = static_cast<float>(p.Z);
if (file)
{
float b = i_depthToRgb.data[i * 4 + 0];
float g = i_depthToRgb.data[i * 4 + 1];
float r = i_depthToRgb.data[i * 4 + 2];
fprintf(file, "%.4f %.4f %.4f %.4f %.4f %.4f\n", cameraX, cameraY, cameraZ, r, g, b);
}
//cout << "x: " << cameraX << "y: " << cameraY << "z: " << cameraZ << endl;
//GLubyte *rgb = new GLubyte();
//rgb[2] = i_depthToRgb.data[i * 4 + 0];
//rgb[1] = i_depthToRgb.data[i * 4 + 1];
//rgb[0] = i_depthToRgb.data[i * 4 + 2];
//// 显示点
//glColor3ubv(rgb);
//glVertex3f(cameraX, -cameraY, cameraZ);
}
}
fclose(file);
cout << "文件保存成功" << endl;
}
}
}
// 释放资源
SafeRelease(m_pColorFrame);
SafeRelease(m_pDepthFrame);
SafeRelease(m_pInfraredFrame);
SafeRelease(m_pColorFrameReference);
SafeRelease(m_pDepthFrameReference);
SafeRelease(m_pInfraredFrameReference);
SafeRelease(m_pMultiFrame);
}
不停刷新显示
cv::destroyAllWindows();
m_pKinectSensor->Close();
std::system("pause");
return 0;
结束。
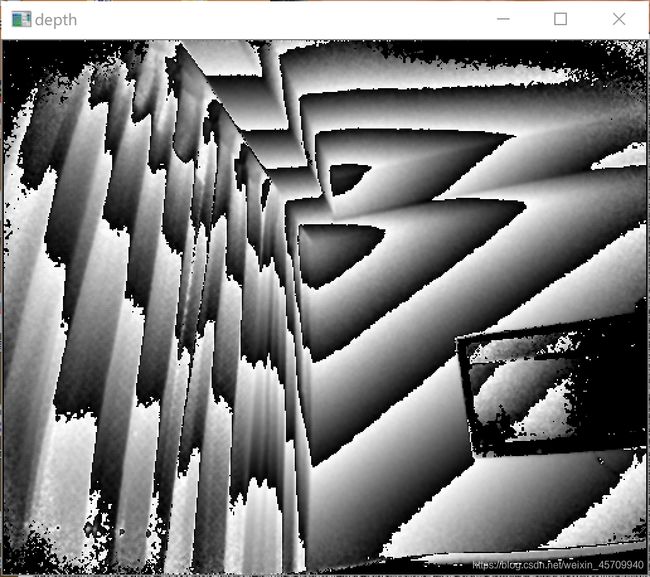
运行结果

预留任务
深度信息保存为pcd格式。
欢迎留言。