数据结构(三) 栈和队列
刚才发现一个网站上,讲栈讲的特别好,给大家推荐下
http://www.nowamagic.net/librarys/veda/detail/2270
一、 填空
1、循环队列队满的条件是( front ==(rear+1)mod n ),队空的条件是( rear == front )。
解释:
请参考这篇博文http://blog.csdn.net/huangkq1989/article/details/5719529
2、设有一个空栈,栈顶指针为1000H,现有输入序列为1、2、3、4、5, 经过push,push,pop,push,pop,push,push后,输出序列是( 23 ),栈顶指针是( 1003H )。
解释:
切记push操作是往栈顶插入元素,而pop操作是删除栈顶元素,即把栈顶元素输出。
| push | push /pop | push/pop | push | push |
|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 |
| 1000H | 1001H | 1001H | 1001H | 1002H |
栈顶指针在栈顶元素的下一个位置上
3、设一个链栈的栈顶指针为ls,栈中结点两个字段分别为data和next,其中next是指示后继结点的指针,栈空的条件是( ls=Null ),如果栈不空,则退栈操作为p=ls;( ls=ls->next );free(p)。
解释:
栈顶指针Is为Null,即栈为空栈,这个需要记住
退栈的话,形象点说,就是把栈里面的往外推,后进先出的原则
p=ls;//把栈顶指针ls赋值给p
ls=ls->next;//改变栈顶指针的值为它的后继指针
free(p);//释放p4、栈和队列是两种特殊的线性表,栈的特点是( 后进先出 ),队列的特点是( 先进先出 ),二者的共同点是只允许在它们的( 端点 )处插入和删除数据元素。
解释:
这个就是它们的特点,记住就好!
5、栈结构通常采用的两种存储结构是( 顺序存储和链式存储 );其判定栈空的条件分别是( top == 0和top == null ),判定栈满的条件分别是(top == maxsize 和 内存无可用空间 )。
解释:
记住顺序存储的原理是数组,链式存储的原理是指针。
6、( 栈 )可作为实现递归函数调用的一种数据结构。
解释:
自己看书,没啥好解释的。
7、数组Q[n]用来表示一个循环队列,f为当前队头的前一个位置,r为队尾元素的位置,计算队列中元素个数的公式为( (r-f+n)mod n )。
解释:
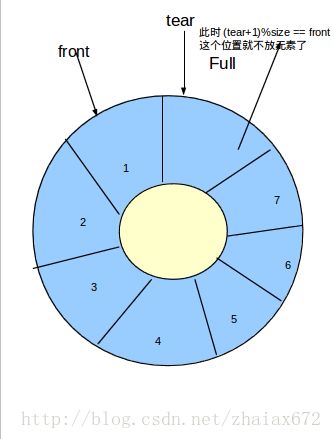
如图,f=0,r=7,n=8。(r-f+n) mod n =(7-0+8) mod 8 =7。公式得证!
8、循环队列的引入是为了克服( 假溢出 )。
解释:
这个很简单,自己想。
9、表达式a*(b+c)-d的后缀表达式是( abc+*d- )。
解释:
http://www.nowamagic.net/librarys/veda/detail/2306,这个是个很不错的网站!!
二、 选择题
1、若一个栈的输入序列是1,2,3……n,输出序列的第一个元素是n,则第i个输出元素是( D )。
A、不确定 B、n-i C、n-i-1 D、n-i+1
不解释,自己去试!
2、设数组SQ[m]作为循环队列SQ的存储空间,front为队头指针,rear为队尾指针,则执行出队操作的语句为( B )
A:front++ B:front=(front+1) mod m
C:rear=(rear+1)mod m D:front=(front+1)mod (m+1)
解释:按照先进先出的原则,就是不停地把队头指针的下一个指针赋值给它
3、链栈与顺序栈相比有一个明显的优点是( B )。
A:插入操作更加方便 B:通常不会出现栈满的情况
C:不会出现栈空的情况 D:删除操作更加方便
解释:
顺序存储 栈空的条件 top == 0;栈满的条件 top == maxsize【数组,懂吧】
链式存储 栈栈空的条件 top == null ;栈满的条件 内存无可用空间 【指针,懂吧】
4、判定一个顺序栈ST(最多元素为m)为空的条件是( B ),栈满的条件是( D )。
A:STtop!=0 B:STtop= =0 C:STtop!=m D:STtop= =m
参照上一题。。。
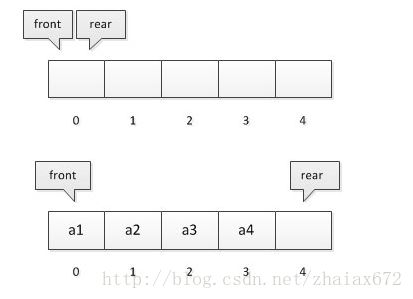
5、判定一个顺序队列QU(最多元素为m)为空的条件是( C ),队满的条件是( A )。
A:QU->rear-QU->front= =m B:QU->rear-QU->front-1= =m
C:QU->front= =QU->rear D:QU->front= =QU->rear+1
这个应该很好想吧
6、判定一个循环队列QU(最多元素为m)为空的条件是( A ),队满的条件是( C )。
A:QUrear= =QUfront B:QUrear!=QUfront
C:QUfront= =(QUrear+1)%m D:QUfront! =(QUrear+1)%m
参照填空第一题
7、设栈S和队列Q的初始状态为空,元素e1、e2、e3、e4、e5、e6依次通过栈S,一个元素出栈后即进入队列Q,若6个元素出列的顺序是e2、e4、e3、e6、e5、e1,则栈S的容量至少应该是( C )。
A:6 B:4 C:3 D:2
参照填空题第二道
8、一个栈的入栈序列是1,2,3,4,5,则栈的不可能的输出序列是( C )。
A:54321 B:45321 C:43512 D:12345
解释:先进后出,一个个试一下
9、设计一个判别表达式中左右括号是否配对的算法,采用( B )数据结构最佳。
A:顺序表 B:栈 C:队列 D:链表
解释:没错,这个又是书上的栈的一个应用
10、一个队列的入队顺序是1,2,3,4,则队列的输出顺序是( B )。
A:4321 B:1234 C:1432 D:3241
解释:先进先出
11、栈和队的主要区别在于( D )。
A:它们的逻辑结构不一样 B:它们的存储结构不一样
C:所包含的运算不一样 D:插入、删除运算的限定不一样
解释:
栈(Stack)是限定只能在表的一端进行插入和删除操作的线性表。
队列(Queue)是限定只能在表的一端进行插入和在另一端进行删除操作的线性表。
12、设数组S[n]作为两个栈S1和S2的存储空间,对任何一个栈只有当S[n]全满时才不能进行进栈操作。为这两个栈分配空间的最佳方案是( A )。
A:S1的栈底位置为0,S2的栈底位置为n-1
B:S1的栈底位置为0,S2的栈底位置为n/2
C:S1的栈底位置为0,S2的栈底位置为n
D:S1的栈底位置为0,S2的栈底位置为1
解释:
利用栈底位置不变的特性,可让两个顺序栈共享一个一维数据空间,以互补余缺,实现方法是:将两个栈的栈底位置分别设在存储空间的两端,让它们的栈顶各自向中间延伸。这样,两个栈的空间就可以相互调节,只有在整个存储空间被占满时才发生上溢,这样一来产生上溢的概率要小得多。
三、 算法设计
1、 以标志变量flag作为判断循环队列空或满的依据,写出循环队列中插入和删除的算法。
分析:设标志flag=0表示队空,flag=1表示队不空。则队空条件为(rear=front)&&(flag=0),队满条件为(rear=front)&&(flag=1)。
(1)插入算法:
void insert (sqQueue sq , QElemType x) {
if ((sq.rear= =sq.front)&&(flag= =1))
error(‘overflow’);
else {
flag=1;
sq.rear=(sq.rear+1)%maxqsize;
sq.data[sq.rear]=x ;
}
}//insert
(2)删除算法:
void delete (sqQueue sq ) {
if ((sq.rear= =sq.front)&&(flag= =0)
error(“underflow’);
else {
flag=0;
sq.front=(sq.front+1)%maxqsize;
x=sq.data[sq.front];
}
}//delete
2、 假设以不带头结点的循环链表表示队列,并且只设一个指针指向队尾结点,但不设头指针。试设计相应的入队和出队的算法。
分析:出队操作是在循环单链表的头部进行,相当于删除首结点,而入队操作是在循环单链表的尾部进行,相当于在终端结点后插入一个结点。算法如下:
(1)入队算法:
void enqueue( QueuePtr rear, Qelemtype x ) {
s=( QueuePtr)malloc(sizeof (Qnode));
sdata=x;
if (rear= =Null) { rear=s;
rearnext=s;}
else {snext=rearnext;
rearnext=s;
rear=s;
}
}//enqueue
(2) 出队算法:
void delqueue (QueuePtr rear, Qelemtype x) {
if (rear= =Null) return ERROR;
else { s=rearnext;
if (s= =rear) rear=Null;
else rearnext=snext;
x=s->data;
free(s);
}
}//delqueue
加油!!