二维卷积神经网络的初始化为0及其他初始化方式对比
今天想结合实验及公式讨论下,二维卷积神经网络下,
- 初始化为0
- 初始化为常数
- kaiming初始化
3种初始化方式的结果。
并分析复杂模型不能初始化为0的根本原因。
1. 实验背景
先介绍下实验模型,用的是Pytorch下两层卷积网络,各接BN层和ReLU层:
class Model(nn.Module):
def __init__(self):
super(Model, self).__init__()
self.conv1 = nn.Conv2d(3, 3, 3, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(3)
self.conv2 = nn.Conv2d(3, 3, 3, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(3)
self.relu = nn.ReLU(inplace=True)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.constant_(m.weight, 0.)
# for m in self.modules():
# if isinstance(m, nn.Conv2d):
# nn.init.constant_(m.weight, 5.)
# for m in self.modules():
# if isinstance(m, nn.Conv2d):
# nn.init.kaiming_normal_(m.weight, mode="fan_in", nonlinearity="relu")
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.conv2(x)
x = self.bn2(x)
x = self.relu(x)
return x
优化器选用SGD+momentum,学习率为1e-2
optimizer = torch.optim.SGD(params=model.parameters(), lr=1e-2)
训练40个epoch观察loss、两个conv层的均值和方差。
2. 实验结果
老规矩,先上结果!
下面分别为4个实验的结果:
- 初始化为0
- 初始化为0但只有一个conv层
- 初始化为5
- kaiming初始化
每个实验结果中的5个折线图分别为:
- loss值
- conv1的均值
- conv1的方差
- conv2的均值
- conv2的方差
初始化为0:
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.constant_(m.weight, 0.)
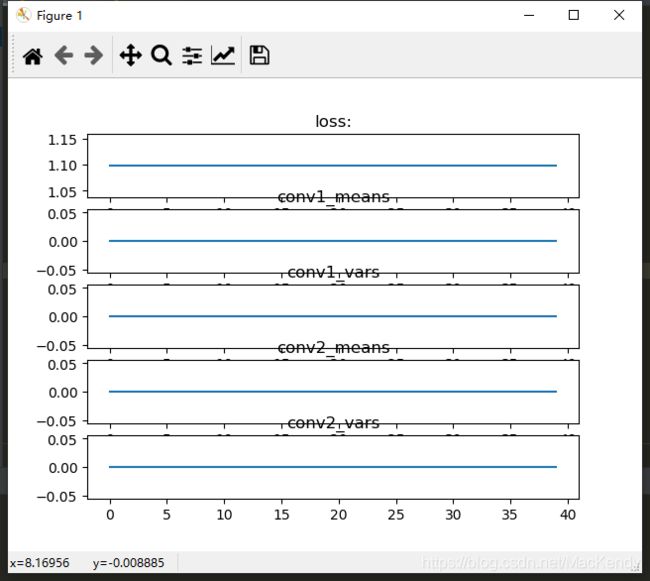
观察到经过40个epoch,两个conv层的均值和方差一直保持为0。
loss也一直悬浮在1.10附近。
初始化为0且只留一个conv层:
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.constant_(m.weight, 0.)
在forward处把其他层都注释掉:
def forward(self, x):
# x = self.conv1(x)
# x = self.bn1(x)
# x = self.relu(x)
x = self.conv2(x)
# x = self.bn2(x)
# x = self.relu(x)
return x
可以看到虽初始化为0,但在只剩一个conv层的时候,是能产生梯度的。(后面会通过公式解释)
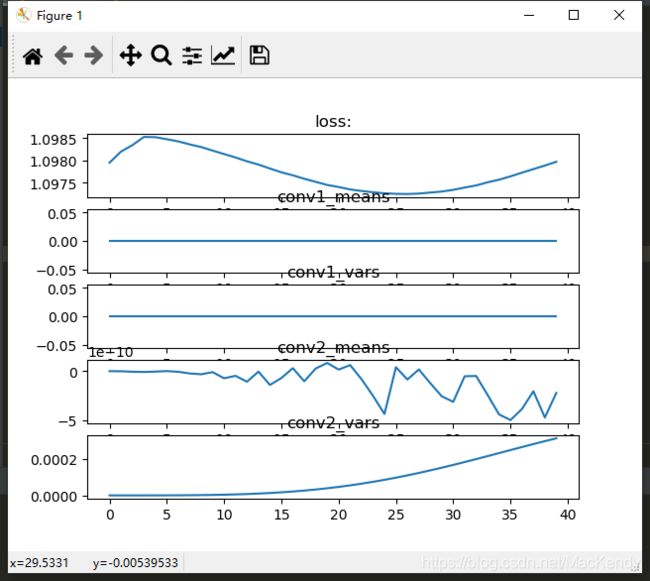
初始化为5:
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.constant_(m.weight, 5.)


初始化为5是可以通过SGD跑起来的,两个conv层的方差随着训练的迭代在提升,均值在5附近震荡。
kaiming初始化:
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode="fan_in", nonlinearity="relu")
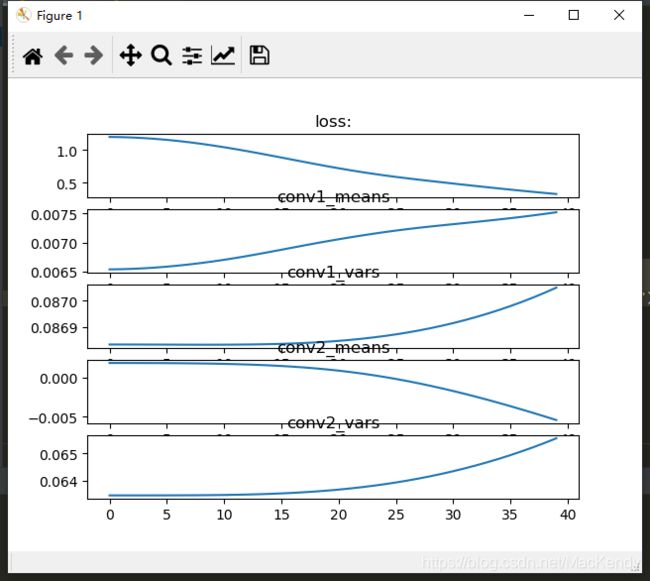
明显观察到两个conv层的学习是很平缓的。
对比 初始化为0 和 初始化为0且只留一个conv层 可以得知,单层卷积初始化为0是可以产生梯度的,但在两层及以上的卷积网络初始化为0则梯度均为0。
对比 初始化为0 和 初始化为5 ,在相同的网络结构下,后者是能够训练起来的(抛开训练的好坏),证明初始化为常数不是训练失败的根本原因,初始化为0才是。
对比 初始化为5 和 kaiming初始化 ,在相同的网络结构、相同的训练次数下,后者的loss值更低,证明在加了BN层后,科学的初始化方式,仍能有效提升模型的训练速度。
3. 公式推导
此处仅展示一层conv的计算过程,足以解释多层卷积网络初始化为0的致命影响。
假设图像(image)的size为3X3,卷积核(kernel)的size为2X2,由此输出的特征图(Feature Map)为2X2。
I m a g e = [ i 1 i 2 i 3 i 4 i 5 i 6 i 7 i 8 i 9 ] K e r n e l = [ k 1 k 2 k 3 k 4 ] F e a t u r e = [ f 1 f 2 f 3 f 4 ] Image = \begin{bmatrix} i_1 & i_2 & i_3 \\ i_4 & i_5 & i_6 \\ i_7 & i_8 & i_9 \end{bmatrix} \\ Kernel = \begin{bmatrix} k_1 & k_2 \\ k_3 & k_4 \\ \end{bmatrix} \\ Feature = \begin{bmatrix} f_1 & f_2 \\ f_3 & f_4 \\ \end{bmatrix} Image=⎣⎡i1i4i7i2i5i8i3i6i9⎦⎤Kernel=[k1k3k2k4]Feature=[f1f3f2f4]
Feature的各元素由Image和Kernel计算可得:
f 1 = i 1 k 1 + i 2 k 2 + i 4 k 3 + i 5 k 4 f 2 = i 2 k 1 + i 3 k 2 + i 5 k 3 + i 6 k 4 f 3 = i 4 k 1 + i 5 k 2 + i 7 k 3 + i 8 k 4 f 4 = i 5 k 1 + i 6 k 2 + i 8 k 3 + i 9 k 4 f_1 = i_1k_1 + i_2k_2 + i_4k_3 + i_5k_4 \\ f_2 = i_2k_1 + i_3k_2 + i_5k_3 + i_6k_4 \\ f_3 = i_4k_1 + i_5k_2 + i_7k_3 + i_8k_4 \\ f_4 = i_5k_1 + i_6k_2 + i_8k_3 + i_9k_4 f1=i1k1+i2k2+i4k3+i5k4f2=i2k1+i3k2+i5k3+i6k4f3=i4k1+i5k2+i7k3+i8k4f4=i5k1+i6k2+i8k3+i9k4
Feature和label产生的loss为:
L o s s = ∂ f 1 + ∂ f 2 + ∂ f 3 + ∂ f 4 Loss = \partial f_1 + \partial f_2 + \partial f_3 + \partial f_4 Loss=∂f1+∂f2+∂f3+∂f4
由此BP求得的Kernel的梯度为:
∂ L o s s ∂ k 1 = ∂ L o s s f ⋅ ∂ f ∂ k 1 = ∂ f 1 i 1 + ∂ f 2 i 2 + ∂ f 3 i 4 + ∂ f 4 i 5 \frac{\partial Loss} {\partial k_1} = \frac{\partial Loss}{f} \cdot \frac {\partial f}{\partial k_1} = \partial f_1 i_1 + \partial f_2 i_2 + \partial f_3 i_4 + \partial f_4 i_5 ∂k1∂Loss=f∂Loss⋅∂k1∂f=∂f1i1+∂f2i2+∂f3i4+∂f4i5
k 2 、 k 3 、 k 4 k2 、k3、k4 k2、k3、k4的梯度也是类似算法。
Loss是通常是大于0的,即 ∂ f 1 、 ∂ f 2 、 ∂ f 3 、 ∂ f 4 \partial f_1、 \partial f_2、 \partial f_3、 \partial f_4 ∂f1、∂f2、∂f3、∂f4一定不为0。
所以权重能否产生梯度只取决于 i i i。
那么我们来回顾实验中,权重初始化为0的两个情况:
- 模型由两层conv堆叠:权重一直为0
- 模型中仅含一层conv:权重得到更新
其实两种情况的根本差别在于Image的不同。
当只有一层conv,Image就是输入的图像,所以通常不为0。
当有两层conv,由于第一层的权重均为0,导致输入第二层的Image(就是第一层输出的Feature)均为0。由此导致conv2无法更新,回传给conv1的梯度也为0。
最终的结果就是所有层的权重均无法更新。
至此也理清了在复杂网络中,初始化为0将导致模型无法训练的根本原因了。
最后附上实验源码,希望本文能帮助到你,也欢迎讨论指正~:
import torch
import torch.nn as nn
import matplotlib.pyplot as plt
class Model(nn.Module):
def __init__(self):
super(Model, self).__init__()
self.conv1 = nn.Conv2d(3, 3, 3, padding=1, bias=False)
self.bn1 = nn.BatchNorm2d(3)
self.conv2 = nn.Conv2d(3, 3, 3, padding=1, bias=False)
self.bn2 = nn.BatchNorm2d(3)
self.relu = nn.ReLU(inplace=True)
# for m in self.modules():
# if isinstance(m, nn.Conv2d):
# nn.init.constant_(m.weight, 0.)
# for m in self.modules():
# if isinstance(m, nn.Conv2d):
# nn.init.constant_(m.weight, 5.)
for m in self.modules():
if isinstance(m, nn.Conv2d):
nn.init.kaiming_normal_(m.weight, mode="fan_in", nonlinearity="relu")
def forward(self, x):
x = self.conv1(x)
x = self.bn1(x)
x = self.relu(x)
x = self.conv2(x)
x = self.bn2(x)
x = self.relu(x)
return x
size1 = (1, 3, 224, 224)
size2 = (1, 224, 224)
image = torch.randn(size1)
label = torch.full(size2, 2, dtype=torch.long)
model = Model()
model = model.train()
optimizer = torch.optim.SGD(params=model.parameters(), lr=1e-2, momentum=0.1)
criterion = nn.CrossEntropyLoss()
losses = []
conv1_means = []
conv1_vars = []
conv2_means = []
conv2_vars = []
figure = plt.figure()
axes1 = figure.add_subplot(5, 1, 1)
axes1.set_title("loss:")
axes2 = figure.add_subplot(5, 1, 2)
axes2.set_title("conv1_means")
axes3 = figure.add_subplot(5, 1, 3)
axes3.set_title("conv1_vars")
axes4 = figure.add_subplot(5, 1, 4)
axes4.set_title("conv2_means")
axes5 = figure.add_subplot(5, 1, 5)
axes5.set_title("conv2_vars")
epochs = 40
for i in range(epochs):
pred = model(image)
loss = criterion(pred, label)
loss.backward()
losses.append(loss.item())
conv1_weight = model.state_dict()["conv1.weight"]
conv1_means.append(conv1_weight.mean())
conv1_vars.append(conv1_weight.var())
conv2_weight = model.state_dict()["conv2.weight"]
conv2_means.append(conv2_weight.mean())
conv2_vars.append(conv2_weight.var())
print("round {}: loss = {}".format(i, loss.item()))
optimizer.step()
axes1.plot(losses)
axes2.plot(conv1_means)
axes3.plot(conv1_vars)
axes4.plot(conv2_means)
axes5.plot(conv2_vars)
plt.show()