PCA(主成分分析)获取BoundingBox&代码分析
引言
最近要用到PCA获取目标点云的BoundingBox,但是网上给出的有关PCA的代码大都太简洁了,我觉得可能是大佬觉得比较简单,没有详细描述。这里记录一下自己的探究结果,方便大家理解。欢迎留言讨论,如有错误,请批评指正。
理论
PCA(Principal Component Analysis)是一种十分常用的数据降维方法,其主要思想是通过线性变换的方法,将一组高维数据投影成互不相关的低维数据,保留原始数据最关键、最具代表性的数据,以压缩数据量、加速运算过程。
通过问题概述PCA推导过程:
-
PCA的目标是对原始数据进行降维,怎么降维呢?
由于数据是基于一组N维正交基表示的,因此可以将原始数据进行重新投影,投影到新的一组K维正交基上,当K -
那么新的正交基需要满足哪些条件呢?
为了最大程度保留原始数据的信息,需要使降维以后的数据尽可能的分散。也就是说,新的正交基需要保证降维数据的分散程度达到最大。而数据的分散程度通常使用方差来描述,即新的正交基要保证降维后数据的方差和达到最大。当然,还需要保证基之间相互正交。 -
具体怎么求呢?
在实际求目标正交基的时候,需要同时保证降维后数据的方差和最大、基之间相互正交。在数学上,数据的协方差矩阵的对角线元素描述的是数据的方差,非对角线元素描述的是数据的协方差,即变量之间的相互关系。因此上述两条件可以统一到协方差矩阵里,而且降维前后协方差矩阵满足关系: D = P C P T D=PCP^T D=PCPT, D D D为降维后数据协方差矩阵, C C C为原数据协方差矩阵。因此,目标就变成了求解矩阵 P P P,使得上述等式中 D D D为对角阵(对 C C C进行对角化),且 P P P为 P C P T PCP^T PCPT中最大的前 K K K个(保证方差和最大)对角线元素对应的特征向量组成的矩阵。 -
算法步骤
1)求原数据协方差矩阵 C = 1 / m ∗ X X T C=1/m*XX^T C=1/m∗XXT;
2)求出协方差矩阵 C C C的特征值及对应的特征向量;
3)将特征向量按对应特征值大小从上到下按行排列成矩阵,取前 K K K行组成矩阵;
4) Y = P X Y=PX Y=PX即为降维到 K K K维后的数据.
PCA详细理论介绍,可参考如下博客,讲解的十分清楚:
- PCA的数学原理
- 主成分分析(PCA)原理总结
- 线性代数之主成分分析(PCA)算法
- 主成分分析(PCA)原理及推导–参考其拉格朗日求解法
代码
环境:Win10+VS2015+PCL1.8
代码流程:
- 导入点云–>计算质心和协方差矩阵–>计算主方向(即特征向量);
- 将点云转到参考坐标系,保证点云主方向与参考坐标系坐标轴重合;
- 计算转换后点云的边界值(min_pt、max_pt)–>计算BoundingBox形心(mean_diag)–>将mean_diag转换到原点云;
- 最后根据变换关系及形心位置addCube(),在原点云形心处添加BoundingBox。
其实,在流程中的第一步就已经完成了点云主方向的计算,后续过程只是为了保证BoundingBox能完整的包围点云。
#include
float scale = (whd(0) + whd(1) + whd(2)) / 3; // 点云平均尺度,用于设置主方向箭头大小
// std::cout << "width/heigth/depth:" << whd << endl;
PointType cp; // 箭头由质心分别指向pirncipal_dir_X、pirncipal_dir_Y、pirncipal_dir_Z
cp.x = centroid(0);
cp.y = centroid(1);
cp.z = centroid(2);
PointType principal_dir_X;
principal_dir_X.x = scale * eigen_vectors(0, 0) + cp.x;
principal_dir_X.y = scale * eigen_vectors(1, 0) + cp.y;
principal_dir_X.z = scale * eigen_vectors(2, 0) + cp.z;
PointType principal_dir_Y;
principal_dir_Y.x = scale * eigen_vectors(0, 1) + cp.x;
principal_dir_Y.y = scale * eigen_vectors(1, 1) + cp.y;
principal_dir_Y.z = scale * eigen_vectors(2, 1) + cp.z;
PointType principal_dir_Z;
principal_dir_Z.x = scale * eigen_vectors(0, 2) + cp.x;
principal_dir_Z.y = scale * eigen_vectors(1, 2) + cp.y;
principal_dir_Z.z = scale * eigen_vectors(2, 2) + cp.z;
viewer.addArrow(principal_dir_X, cp, 1.0, 0.0, 0.0, false, "arrow_x"); // 箭头附在起点上
viewer.addArrow(principal_dir_Y, cp, 0.0, 1.0, 0.0, false, "arrow_y");
viewer.addArrow(principal_dir_Z, cp, 0.0, 0.0, 1.0, false, "arrow_z");
// 显示包围盒,并设置包围盒属性,以显示透明度
viewer.addCube(tfinal, qfinal, whd(0), whd(1), whd(2), "bbox");
viewer.setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_REPRESENTATION, pcl::visualization::PCL_VISUALIZER_REPRESENTATION_WIREFRAME, "bbox");
viewer.setShapeRenderingProperties(pcl::visualization::PCL_VISUALIZER_COLOR, 1.0, 0.0, 0.0, "bbox");
while (!viewer.wasStopped())
{
viewer.spinOnce(100);
}
return 0;
}
另外,还可以使用pcl中的pca接口计算点云的主方向:
// 使用pcl中的pca接口
pcl::PointCloud<pcl::PointXYZ>::Ptr cloudPCAprojection (new pcl::PointCloud<pcl::PointXYZ>);
pcl::PCA<pcl::PointXYZ> pca;
pca.setInputCloud(cloudSegmented);
pca.project(*cloudSegmented, *cloudPCAprojection);
std::cerr << std::endl << "EigenVectors: " << pca.getEigenVectors() << std::endl; // 计算特征向量
std::cerr << std::endl << "EigenValues: " << pca.getEigenValues() << std::endl; // 计算特征值
结果
点云下载地址:lamppost.pcd
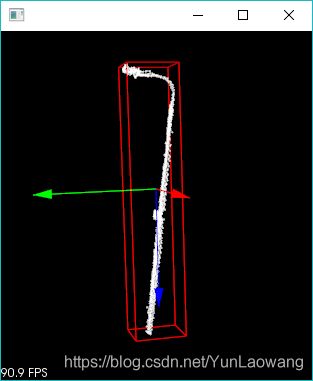
分析
- 为什么要将点云变换到原点,而不是直接对原点云进行操作?
把结论写在前面:如果只求原点云的主方向,则直接对原点云进行操作就可以了。之所以要将点云转换到原点,是为了后续能够正确的显示包围盒。原因在于getMinMax3D()计算得到的min_pt与max_pt代表的是原点坐标系下的边界值,而不是点云主方向坐标系下的值。
首先需要明确,原点云的特征向量组成了其主方向坐标系(称为 E E E系),该坐标系原点即是点云质心。同时 ,特征向量和质心坐标组成的 3 ∗ 4 3*4 3∗4的变换矩阵,即代表由参考坐标系(称为 W W W系)到主方向坐标系的变换矩阵 T E W T_{EW} TEW。
将点云从 E E E系变换到 W W W系,此时的点云的3个主方向已经与 W W W系的坐标轴重合,同时其质心也与 W W W系原点重合;在这种状态下,求点云3个方向上的边界值才是准确的。
因为pcl::getMinMax3D(*cloud, min_pt, max_pt)计算的是点云沿 W W W系3个坐标轴方向上的最小、最大值,所以如果点云本身的 E E E系没有与 W W W系重合,即未将点云从 E E E系变换到 W W W系,则通过getMinMax3D()计算得到的min_pt与max_pt代表的就不是点云主方向上的边界值。
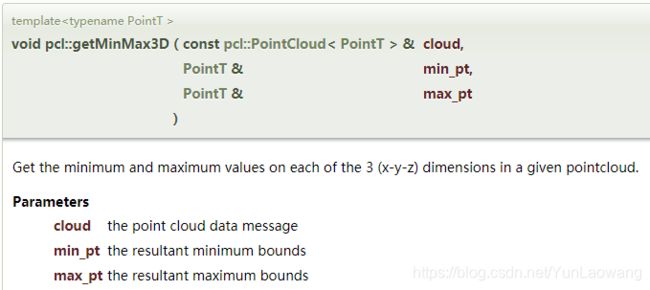
因此,如果直接对原点云进行操作,而不变换到 W W W系进行操作,则得到的BoundingBox的位置和尺寸都会有偏差,其原因就在于pcl::getMinMax3D(*point_cloud_ptr, min_pt, max_pt)得到的min_pt、max_pt结果不对,对应的代码如下:
PointType min_pt, max_pt;
pcl::getMinMax3D(*point_cloud_ptr, min_pt, max_pt); // 对原点云进行操作
const Eigen::Vector3f mean_diag = 0.5f*(max_pt.getVector3fMap() + min_pt.getVector3fMap());
// T_EW
const Eigen::Quaternionf qfinal(eigen_vectors);
const Eigen::Vector3f tfinal = mean_diag ;
参考
- PCA最小包围盒:Find minimum oriented bounding box of point cloud (C++ AND PCL)
- 网上很多相似代码的起源:Nicola Fioraio
- AABB&OBB包围盒:Moment of inertia and eccentricity based descriptors
- C++_Eigen函数库用法笔记——Block Operations