图像局部特征描述子——Harris角点及其Python代码实现
前言:参考了《Python计算机视觉编程》一书,部分知识点理解有误请多谅解( • ̀ω•́ )✧
原理部分叙述
我们需要利用一定的准则来获取图片中的某些特征点,并获取特征点周围的图像块,最后进行图片的匹配,特征应具有几何、光度等的不变性,本文章介绍的是利用Harris算子进行特征获取。
角点(corner points):
• 局部窗口沿各方向移动,均产生明显变化的点
• 图像局部曲率突变的点
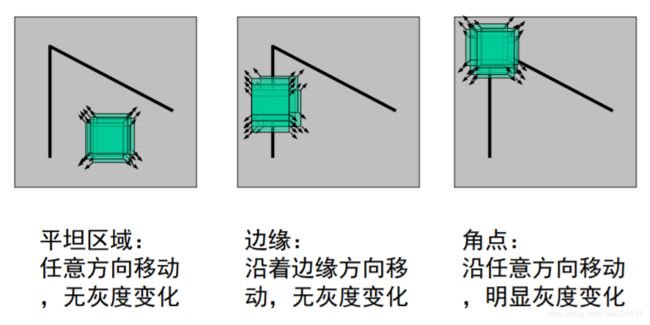
以下是不同类型的角点

如何探查出角点?
假设有一块矩形区域在平面上移动,那么矩形内的图案有以下三种情况:
此时我们可以假设:
将图像窗口平移[u,v]产生灰度变化E(u,v),那么:

函数I(x,y)表示图像的灰度信息,将I(x+u, y+v)函数在(x, y)处泰勒展开可以得到

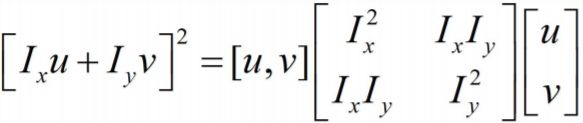
最后,我们将E(u,v)用下面的式子表示:

并且,M等于:

记M的特征值为K1和K2,当K1和K2都比较小的时候可以认为是在平坦区域,K1或K2其中有一个远大于另一个值,则可能是在边缘区域,当K1和K2都比较大时,表示位于角点。
怎样确定K1和K2的大小关系?使用角点响应函数R

• R 只与M的特征值有关
• 角点:R 为大数值正数
• 边缘:R为大数值负数
• 平坦区:R为小数值
Python代码实现
我们需要建立一个文件用于写入角点响应函数,我这里设为Harris.py,另外需要另一个文件用来运行我们的命令,我设为test.py。
下面是Harris.py文件内容:
#
#coding:utf-8
from scipy.ndimage import filters
from numpy import *
from pylab import *
def compute_harris_response(im,sigma=3):
imx=zeros(im.shape)#计算导数
filters.gaussian_filter(im,(sigma,sigma),(0,1),imx)
imy=zeros(im.shape)
filters.gaussian_filter(im,(sigma,sigma),(1,0),imy)
Wxx=filters.gaussian_filter(imx*imx,sigma)
#计算harris矩阵分量
Wxy=filters.gaussian_filter(imx*imy,sigma)
Wyy=filters.gaussian_filter(imy*imy,sigma)
Wdet=Wxx*Wyy-Wxy**2 #计算矩阵的特征值和迹
Wtr=Wxx+Wyy
return Wdet/Wtr
def get_harris_points(harrisim,min_dist=10,threshold=0.1):
"""从一幅Harris响应图像中返回角点"""
conner_threshold=harrisim.max()*threshold
harrisim_t=(harrisim>conner_threshold)*1
coords=array(harrisim_t.nonzero()).T
candidate_values=[harrisim[c[0],c[1]] for c in coords]
index=argsort(candidate_values)
allowed_locations=zeros(harrisim.shape)
allowed_locations[min_dist:-min_dist,min_dist:-min_dist]=1
filtered_coords=[]
for i in index:
if allowed_locations[coords[i,0],coords[i,1]]==1:
filtered_coords.append(coords[i])
allowed_locations[(coords[i,0]-min_dist):(coords[i,0]+min_dist),(coords[i,1]-min_dist):(coords[i,1]+min_dist)]=0#此处保证min_dist*min_dist只有一个harris特征点
return filtered_coords
def plot_harris_points(image,filtered_coords):
figure()
gray()
imshow(image)
plot([p[1] for p in filtered_coords],[p[0]for p in filtered_coords],'+')
axis('off')
show()
接下来是测试文件test.py
from PIL import Image
from numpy import *
import harris
from pylab import *
from scipy.ndimage import filters
#改变图片路径,测试的时候路径里面有中文好像不可以
im=array(Image.open('C:/Users/lenovo/Desktop/house.jpg').convert('L'))
harrisim=harris.compute_harris_response(im)
filtered_coords=harris.get_harris_points(harrisim)
harris.plot_harris_points(im,filtered_coords)
我的测试结果如下:

