OpenCV学习三十:approxPolyDP 多边拟合函数
approxPolyDP 主要功能是把一个连续光滑曲线折线化,对图像轮廓点进行多边形拟合。
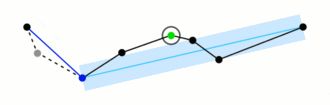
原理图:对比之前黑点连线,之后蓝色连线:
C++: void approxPolyDP(InputArray curve, OutputArray approxCurve, double epsilon, bool closed)
参数详解;
InputArray curve:一般是由图像的轮廓点组成的点集
OutputArray approxCurve:表示输出的多边形点集
double epsilon:主要表示输出的精度,就是另个轮廓点之间最大距离数,5,6,7,,8,,,,,
bool closed:表示输出的多边形是否封闭
#include
#include
#include
#include
using namespace cv;
using namespace std;
int main(int argc, char** argv)
{
Mat img = imread("4.jpg", -1);
pyrDown(img, img, Size(img.cols/2, img.rows/2), 4);
imshow("img", img);imwrite("img.jpg", img);
//通过canny算法找轮廓,这样 findcontours 的结果会好些
Mat canny_out;
Canny(img, canny_out, 45, 127, 3, false);
imshow("canny_out", canny_out);imwrite("canny_out.jpg", canny_out);
//寻找轮廓
vector> contours;
vector hierachy;
findContours(canny_out, contours, hierachy, RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(-1,-1));
drawContours(img, contours, -1, Scalar(0,0,255), 1, 8, hierachy);
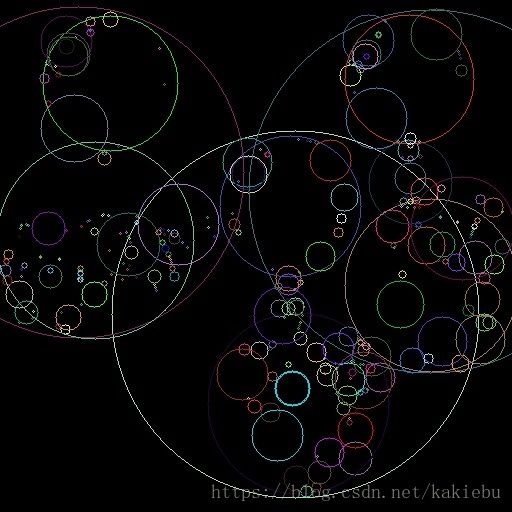
//定义圆形、方形、旋转矩形、椭圆的存储容器
vector> contours_ploy(contours.size());
vector rects_ploy(contours.size());
vector circle_centers(contours.size());
vector circle_radius(contours.size());
vector RotatedRect_ploy;//注意:由于下面赋值的过程中有个点数大于5的条件,所以这里没有直接初始化,才有下面pushback的方法添加值。
vector ellipse_ploy;//注意,这里是画椭圆,但是容器类型是 RotatedRect
//将结果放到各自的容器中
for (size_t i = 0; i< contours.size(); i++)
{
approxPolyDP(contours[i], contours_ploy[i], 5, true);
rects_ploy[i] = boundingRect(contours_ploy[i]);
minEnclosingCircle(contours_ploy[i], circle_centers[i], circle_radius[i]);
if (contours_ploy[i].size() >5)
{
RotatedRect temp1 = minAreaRect(contours_ploy[i]);
RotatedRect_ploy.push_back(temp1);
RotatedRect temp2 = fitEllipse(contours_ploy[i]);
ellipse_ploy.push_back(temp2);
}
}
//定义最终绘图的图片
Mat draw_rect(img.size(), img.type(), Scalar::all(0)),
draw_rotateRect(img.size(), img.type(), Scalar::all(0)),
draw_circle(img.size(), img.type(), Scalar::all(0)),
draw_ellipse(img.size(), img.type(), Scalar::all(0));
//绘图圆形、矩形
RNG rng(12345);
for (size_t i = 0; i