看代码解读CenterNet :Objects as Points
文章目录
- 1. idea
- 2. 网络结果
- 2.1 hm分支
- 2.2 wh分支
- 2.3 reg分支
- 3. 数据+loss
- 4. 推理
- 结果
- reference
摘要:
centernet是单阶段的目标检测网络,采用高斯图来表示目标,速度很快,比YOLOV3更快,效果方面没有对比过。网上也没有具体的对比。
这篇通过读代码的方式来解读centernet,先来张图:

1. idea
文章主要用高斯分布来表示目标,就是一个目标用高斯分布来覆盖,目标中心点的值越大。
2. 网络结果
2.1 hm分支
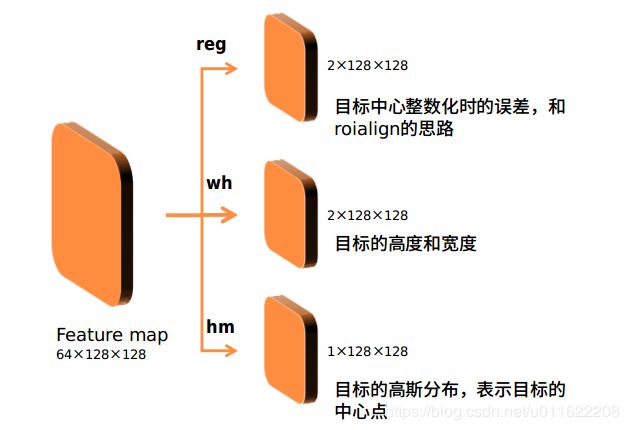
整个网络主要有bone net特征提取网络和输出部分组成,网络结果如上图所示,特征提取网络就不细讲了。用高斯分布来表示目标,网络第三个分支/hm输出部分网络如下:
nn.Sequential( nn.Conv2d(64, 256, kernel_size=3, padding=1, bias=True),
nn.ReLU(inplace=True),
nn.Conv2d(256, classes, kernel_size=final_kernel, stride=1, padding=final_kernel // 2, bias=True))
其实就是一个conv2d(64,256),relu(),conv2d(256,1),最后的输出为n_category×128×128,一个类别一个通道,其中每个点的值表示:是目标的概率有多大。上图是只有一个类别的情况。
2.2 wh分支
网络定义为:
nn.Sequential( nn.Conv2d(64, 256, kernel_size=3, padding=1, bias=True),
nn.ReLU(inplace=True),
nn.Conv2d(256, 2, kernel_size=final_kernel, stride=1, padding=final_kernel // 2, bias=True))
分支最后输出:2×128×128,所有类别用共同的预测宽度w和高度h。
2.3 reg分支
网络定义为:
nn.Sequential( nn.Conv2d(64, 256, kernel_size=3, padding=1, bias=True),
nn.ReLU(inplace=True),
nn.Conv2d(256, 2, kernel_size=final_kernel, stride=1, padding=final_kernel // 2, bias=True))
分支输出:2×128×128,每个点的两个值表示,当前index为目标时hm输出位置的偏差,所有类别用共同的w,h预测值。
总结: 整个网络还是很好理解的。
3. 数据+loss
- 分类误差
采用的focalloss,target是一个n_cat×128×128的矩阵,每一个channel表示一个类别,128×128的每个值是用高斯分布覆盖目标处理出来的。 - 尺寸误差
target是:(2×n_category)×128×128矩阵,用L1_loss。 - 中心点修正误差
target是:(2×n_category)×128×128矩阵,用L1_loss。
4. 推理
- 网络前向传播
output = self.model(images)[-1]
hm = output['hm'].sigmoid_()
wh = output['wh']
reg = output['reg']
就是正常的前向,hm的输出要经过sigmoid。
- 对hm用max_pool2d(3*3)进行滤波
hmax = nn.functional.max_pool2d(heat, (kernel, kernel), stride=1, padding=pad)
- 根据hm的值筛选出前100
scores, inds, clses, ys, xs = _topk(heat, K=K)
- 对结果进行一些后处理,比如中点+reg等
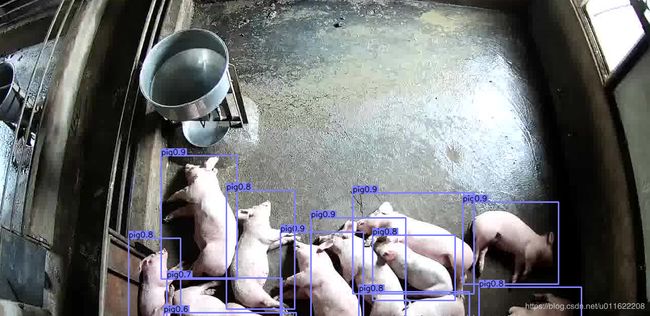
结果
reference
- 【论文笔记】CenterNet:Objects as Points
- centernet源码