SPI协议———stm32读写串行Flash实验(上)
SPI 协议是由摩托罗拉公司提出的通讯协议(Serial Peripheral Interface),即串行外围设备接口,是一种高速全双工的通信总线。它被广泛地使用在 ADC、LCD 等设备与 MCU 间,要求通讯速率较高的场合。
1 SPI 协议的物理层

S S ( Slave Select):从设备选择信号线,常称为片选信号线,也称为 NSS、CS。,即有多少个从设备,就有多少条片选信号线。所以
SPI 通讯以 NSS 线置低电平为开始信号,以 NSS 线被拉高作为结束信号。
SCK (Serial Clock):时钟信号线,用于通讯数据同步。
MOSI (Master Output, Slave Input):主设备输出/从设备输入引脚。
MISO(Master Input,,Slave Output):主设备输入/从设备输出引脚。
2 SPI 协议的协议层
SPI 基本通讯过程如下:

这是一个主机的通讯时序。NSS、SCK、MOSI 信号都由主机控制产生,而 MISO 的信号由从机产生,主机通过该信号线读取从机的数据。MOSI 与 MISO 的信号只在 NSS 为低电平的时候才有效,在 SCK 的每个时钟周期 MOSI 和 MISO 传输一位数据。
通讯的起始和停止信号:标号0处,NSS 信号线由高变低,是 SPI 通讯的起始信号。在图中的标号6处,NSS 信号由低变高,是 SPI 通讯的停止信号,表示本次通讯结束,从机的选中状态被取消。
数据有效性:SPI 使用 MOSI 及 MISO 信号线来传输数据,使用 SCK 信号线进行数据同步。MOSI及 MISO 数据线在 SCK 的每个时钟周期传输一位数据,且数据输入输出是同时进行的。在 SCK 的下降沿时被采样。即在 SCK 的下降沿时刻,MOSI 及 MISO 的数据有效,高电平
时表示数据“1”,为低电平时表示数据“0”。在其它时刻,数据无效,MOSI 及 MISO为下一次表示数据做准备。SPI 每次数据传输可以 8 位或 16 位为单位,每次传输的单位数不受限制。
CPOL/CPHA 及通讯模式:时钟极性 CPOL 是指 SPI 通讯设备处于空闲状态时,SCK 信号线的电平信号(即 SPI 通讯开始前、 NSS 线为高电平时 SCK 的状态)。CPOL=0 时, SCK 在空闲状态时为低电平,CPOL=1 时,则相反。时钟相位 CPHA 是指数据的采样的时刻,当CPHA=0 时,MOSI 或 MISO 数据线上的信号将会在 SCK 时钟线的“奇数边沿”被采样。当 CPHA=1 时,数据线在 SCK 的“偶数边沿”采样。

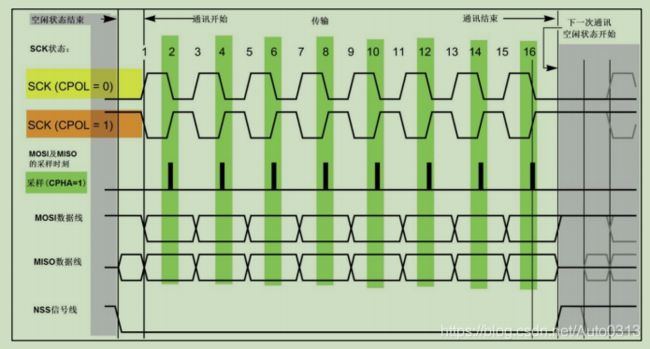
我们来分析这个 CPHA=0 的时序图。首先,根据 SCK 在空闲状态时的电平,分为两种情况。SCK 信号线在空闲状态为低电平时CPOL=0;空闲状态为高电平时,CPOL=1。无论 CPOL=0 还是=1,因为我们配置的时钟相位 CPHA=0,在图中可以看到,采样时刻都是在 SCK 的奇数边沿。注意当 CPOL=0 的时候,时钟的奇数边沿是上升沿,而CPOL=1 的时候,时钟的奇数边沿是下降沿。所以 SPI 的采样时刻不是由上升/下降沿决定的。MOSI 和 MISO 数据线的有效信号在 SCK 的奇数边沿保持不变,数据信号将在 SCK 奇数边沿时被采样,在非采样时刻,MOSI 和 MISO 的有效信号才发生切换。类似地,当 CPHA=1 时,不受 CPOL 的影响,数据信号在 SCK 的偶数边沿被采样。
2.1 SPI特性
STM32 的 SPI 外设可用作通讯的主机及从机,支持最高的 SCK 时钟频率为 fpclk/2 (STM32F103 型号的芯片默认 fpclk1为 72MHz,fpclk2为 36MHz),完全支持 SPI 协议的 4 种模式,数据帧长度可设置为 8 位或 16 位,可设置数据 MSB 先行或 LSB 先行。它还支持双线全双工(前面小节说明的都是这种模式)、双线单向以及单线模式。其中双线单向模式可以同时使用 MOSI 及 MISO 数据线向一个方向传输数据,可以加快一倍的传输速度。而单线模式则可以减少硬件接线,当然这样速率会受到影响。
2.2 SPI 架构剖析

2.3 通讯过程

主模式收发流程及事件说明如下:
(1) 控制 NSS 信号线,产生起始信号(图中没有画出);
(2) 把要发送的数据写入到“数据寄存器 DR”中,该数据会被存储到发送缓冲区;
(3) 通讯开始,SCK 时钟开始运行。MOSI 把发送缓冲区中的数据一位一位地传输出去;MISO 则把数据一位一位地存储进接收缓冲区中;
(4) 当发送完一帧数据的时候,“状态寄存器 SR”中的“TXE 标志位”会被置 1,表示传输完一帧,发送缓冲区已空;类似地,当接收完一帧数据的时候,“RXNE标志位”会被置 1,表示传输完一帧,接收缓冲区非空;
(5) 等待到“TXE 标志位”为 1 时,若还要继续发送数据,则再次往“数据寄存器DR”写入数据即可;等待到“RXNE 标志位”为 1 时,通过读取“数据寄存器DR”可以获取接收缓冲区中的内容。
3 硬件设计

FLASH 芯片(型号:W25Q64)是一种使用 SPI 通讯协议的 NOR FLASH存储器,它的 CS/CLK/DIO/DO 引 脚 分 别 连 接 到 了 STM32 对 应 的 SPI 引 脚NSS/SCK/MOSI/MISO 上,其中 STM32 的 NSS 引脚虽然是其片上 SPI 外设的硬件引脚,但实际上后面的程序只是把它当成一个普通的 GPIO,使用软件的方式控制 NSS 信号,所以在 SPI 的硬件设计中,NSS 可以随便选择普通的 GPIO,不必纠结于选择硬件 NSS 信号。FLASH 芯片中还有 WP 和 HOLD 引脚。WP 引脚可控制写保护功能,当该引脚为低电平时,禁止写入数据。我们直接接电源,不使用写保护功能。HOLD 引脚可用于暂停通讯,该引脚为低电平时,通讯暂停,数据输出引脚输出高阻抗状态,时钟和数据输入引脚无效。我们直接接电源,不使用通讯暂停功能。关于 FLASH 芯片的更多信息,可参考其数据手册《W25Q64》来了解。
4 软件设计
4.1 SPI 硬件相关宏定义
/*SPI接口定义-开头****************************/
#define FLASH_SPIx SPI1
#define FLASH_SPI_APBxClock_FUN RCC_APB2PeriphClockCmd
#define FLASH_SPI_CLK RCC_APB2Periph_SPI1
//CS(NSS)引脚 片选选普通GPIO即可
#define FLASH_SPI_CS_APBxClock_FUN RCC_APB2PeriphClockCmd
#define FLASH_SPI_CS_CLK RCC_APB2Periph_GPIOA
#define FLASH_SPI_CS_PORT GPIOA
#define FLASH_SPI_CS_PIN GPIO_Pin_4
//SCK引脚
#define FLASH_SPI_SCK_APBxClock_FUN RCC_APB2PeriphClockCmd
#define FLASH_SPI_SCK_CLK RCC_APB2Periph_GPIOA
#define FLASH_SPI_SCK_PORT GPIOA
#define FLASH_SPI_SCK_PIN GPIO_Pin_5
//MISO引脚
#define FLASH_SPI_MISO_APBxClock_FUN RCC_APB2PeriphClockCmd
#define FLASH_SPI_MISO_CLK RCC_APB2Periph_GPIOA
#define FLASH_SPI_MISO_PORT GPIOA
#define FLASH_SPI_MISO_PIN GPIO_Pin_6
//MOSI引脚
#define FLASH_SPI_MOSI_APBxClock_FUN RCC_APB2PeriphClockCmd
#define FLASH_SPI_MOSI_CLK RCC_APB2Periph_GPIOA
#define FLASH_SPI_MOSI_PORT GPIOA
#define FLASH_SPI_MOSI_PIN GPIO_Pin_7
#define SPI_FLASH_CS_LOW() GPIO_ResetBits( FLASH_SPI_CS_PORT, FLASH_SPI_CS_PIN )
#define SPI_FLASH_CS_HIGH() GPIO_SetBits( FLASH_SPI_CS_PORT, FLASH_SPI_CS_PIN )
/*SPI接口定义-结尾****************************/
以上代码根据硬件连接,把与 FLASH 通讯使用的 SPI 号 、GPIO 等都以宏封装起来,并且定义了控制 CS(NSS)引脚输出电平的宏,以便配置产生起始和停止信号时使用。
4.2 SPI_FLASH初始化
void SPI_FLASH_Init(void)
{
SPI_InitTypeDef SPI_InitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
/* 使能SPI时钟 */
FLASH_SPI_APBxClock_FUN ( FLASH_SPI_CLK, ENABLE );
/* 使能SPI引脚相关的时钟 */
FLASH_SPI_CS_APBxClock_FUN ( FLASH_SPI_CS_CLK|FLASH_SPI_SCK_CLK|
FLASH_SPI_MISO_PIN|FLASH_SPI_MOSI_PIN, ENABLE );
/* 配置SPI的 CS引脚,普通IO即可 */
GPIO_InitStructure.GPIO_Pin = FLASH_SPI_CS_PIN;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP;
GPIO_Init(FLASH_SPI_CS_PORT, &GPIO_InitStructure);
/* 配置SPI的 SCK引脚*/
GPIO_InitStructure.GPIO_Pin = FLASH_SPI_SCK_PIN;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(FLASH_SPI_SCK_PORT, &GPIO_InitStructure);
/* 配置SPI的 MISO引脚*/
GPIO_InitStructure.GPIO_Pin = FLASH_SPI_MISO_PIN;
GPIO_Init(FLASH_SPI_MISO_PORT, &GPIO_InitStructure);
/* 配置SPI的 MOSI引脚*/
GPIO_InitStructure.GPIO_Pin = FLASH_SPI_MOSI_PIN;
GPIO_Init(FLASH_SPI_MOSI_PORT, &GPIO_InitStructure);
/* 停止信号 FLASH: CS引脚高电平*/
SPI_FLASH_CS_HIGH();
/* SPI 模式配置 */
// FLASH芯片 支持SPI模式0及模式3,据此设置CPOL CPHA
SPI_InitStructure.SPI_Direction = SPI_Direction_2Lines_FullDuplex;
SPI_InitStructure.SPI_Mode = SPI_Mode_Master;
SPI_InitStructure.SPI_DataSize = SPI_DataSize_8b;
SPI_InitStructure.SPI_CPOL = SPI_CPOL_High;
SPI_InitStructure.SPI_CPHA = SPI_CPHA_2Edge;
SPI_InitStructure.SPI_NSS = SPI_NSS_Soft;
SPI_InitStructure.SPI_BaudRatePrescaler = SPI_BaudRatePrescaler_4;
SPI_InitStructure.SPI_FirstBit = SPI_FirstBit_MSB;
SPI_InitStructure.SPI_CRCPolynomial = 7;
SPI_Init(FLASH_SPIx , &SPI_InitStructure);
/* 使能 SPI */
SPI_Cmd(FLASH_SPIx , ENABLE);
}
GPIO 初始化流程如下:
(1) 使用 GPIO_InitTypeDef 定义 GPIO 初始化结构体变量,以便下面用于存储 GPIO 配置;
(2) 调用库函数 RCC_APB2PeriphClockCmd 来使能 SPI 引脚使用的 GPIO 端口时钟。
(3) 向 GPIO 初始化结构体赋值,把 SCK/MOSI/MISO 引脚初始化成复用推挽模式。而CS(NSS)引脚由于使用软件控制,我们把它配置为普通的推挽输出模式。
(4) 使用以上初始化结构体的配置,调用 GPIO_Init 函数向寄存器写入参数,完成 GPIO 的初始化。
配置 SPI 的模式
在配置 STM32 的 SPI 模式前,我们要先了解从机端的 SPI 模式。本例子中可通过查阅 FLASH 数据手册《W25Q64》获取。根据 FLASH 芯片的说明,它支持 SPI 模式 0 及模式 3,支持双线全双工,使用MSB 先行模式,支持最高通讯时钟为 104MHz,数据帧长度为 8 位。
把 STM32 的 SPI 外设配置为主机端,双线全双工模式,数据帧长度为 8位,使用 SPI 模式 3(CPOL=1,CPHA=1),NSS 引脚由软件控制以及 MSB 先行模式。代码中把 SPI 的时钟频率配置成了 4 分频,实际上可以配置成 2 分频以提高通讯速率,读者可亲自尝试一下。最后一个成员为 CRC 计算式,由于我们与 FLASH 芯片通讯不需要 CRC 校验,并没有使能 SPI 的 CRC 功能,这时 CRC 计算式的成员值是无效的。赋值结束后调用库函数 SPI_Init 把这些配置写入寄存器,并调用 SPI_Cmd 函数使能外设。
4.3 使用 SPI 发送和接收一个字节的数据
初始化好 SPI 外设后,就可以使用 SPI 通讯了,复杂的数据通讯都是由单个字节数据收发组成的。
/*等待超时时间*/
#define SPIT_FLAG_TIMEOUT ((uint32_t)0x1000)
#define SPIT_LONG_TIMEOUT ((uint32_t)(10 * SPIT_FLAG_TIMEOUT))
#define FLASH_ERROR(fmt,arg...) printf("<<-FLASH-ERROR->> "fmt"\n",##arg)
#define Dummy_Byte 0xFF
uint16_t SPI_TIMEOUT_UserCallback(uint8_t errorCode)
{
/* 等待超时后的处理,输出错误信息 */
FLASH_ERROR("SPI 等待超时!errorCode = %d",errorCode);
return 0;
}
/**
* @brief 使用SPI发送一个字节的数据
* @param byte:要发送的数据
* @retval 返回接收到的数据
*/
uint8_t SPI_FLASH_SendByte(uint8_t byte)
{
SPITimeout = SPIT_FLAG_TIMEOUT;
/* 等待发送缓冲区为空,TXE事件 */
while (SPI_I2S_GetFlagStatus(FLASH_SPIx , SPI_I2S_FLAG_TXE) == RESET)
{
if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(0);
}
/* 写入数据寄存器,把要写入的数据写入发送缓冲区 */
SPI_I2S_SendData(FLASH_SPIx , byte);
SPITimeout = SPIT_FLAG_TIMEOUT;
/* 等待接收缓冲区非空,RXNE事件 */
while (SPI_I2S_GetFlagStatus(FLASH_SPIx , SPI_I2S_FLAG_RXNE) == RESET)
{
if((SPITimeout--) == 0) return SPI_TIMEOUT_UserCallback(1);
}
/* 读取数据寄存器,获取接收缓冲区数据 */
return SPI_I2S_ReceiveData(FLASH_SPIx );
}
/**
* @brief 使用SPI读取一个字节的数据
* @param 无
* @retval 返回接收到的数据
*/
u8 SPI_FLASH_ReadByte(void)
{
return (SPI_FLASH_SendByte(Dummy_Byte));
}
SPI_FLASH_SendByte 函数实现了前面讲解的“SPI 通讯过程”:
(1) 本函数中不包含 SPI 起始和停止信号,只是收发的主要过程,所以在调用本函数前后要做好起始和停止信号的操作;
(2) 对 SPITimeout 变量赋值为宏 SPIT_FLAG_TIMEOUT。这个 SPITimeout 变量在下面的 while 循环中每次循环减 1,该循环通过调用库函数 SPI_I2S_GetFlagStatus 检测事件,若检测到事件,则进入通讯的下一阶段,若未检测到事件则停留在此处一直检测,当检测 SPIT_FLAG_TIMEOUT 次都还没等待到事件则认为通讯失败,调用的 SPI_TIMEOUT_UserCallback 输出调试信息,并退出通讯;
(3) 通过检测 TXE 标志,获取发送缓冲区的状态,若发送缓冲区为空,则表示可能存在的上一个数据已经发送完毕;
(4) 等待至发送缓冲区为空后,调用库函数 SPI_I2S_SendData 把要发送的数据“byte”写入到 SPI 的数据寄存器 DR,写入 SPI 数据寄存器的数据会存储到发送缓冲区,由 SPI 外设发送出去;
(5) 写入完毕后等待 RXNE 事件,即接收缓冲区非空事件。由于 SPI 双线全双工模式下 MOSI 与 MISO 数据传输是同步的(请对比“SPI 通讯过程”阅读),当接收缓冲区非空时,表示上面的数据发送完毕,且接收缓冲区也收到新的数据;
(6) 等待至接收缓冲区非空时,通过调用库函数 SPI_I2S_ReceiveData 读取 SPI 的数据寄存器 DR,就可以获取接收缓冲区中的新数据了。代码中使用关键字“return”把接收到的这个数据作为 SPI_FLASH_SendByte 函数的返回值,所以我们可以看到在下面定义的 SPI 接收数据函数 SPI_FLASH_ReadByte,它只是简单地调用了SPI_FLASH_SendByte 函数发送数据“Dummy_Byte”,然后获取其返回值(因为不关注发送的数据,所以此时的输入参数“Dummy_Byte”可以为任意值)。可以这样做的原因是 SPI 的接收过程和发送过程实质是一样的,收发同步进行,关键在于我们的上层应用中,关注的是发送还是接收的数据。
4.4 读取Flash设备的ID


通过指令表中的读 ID 指令“JEDEC ID”可以获取这两个编号,该指令编码为“9Fh”,其中“9F h”是指 16 进制数“9F” (相当于 C 语言中的 0x9F)。紧跟指令编码的三个字节分别为 FLASH 芯片输出的“(M7-M0)”、“(ID15-ID8)”及“(ID7-ID0)” 。
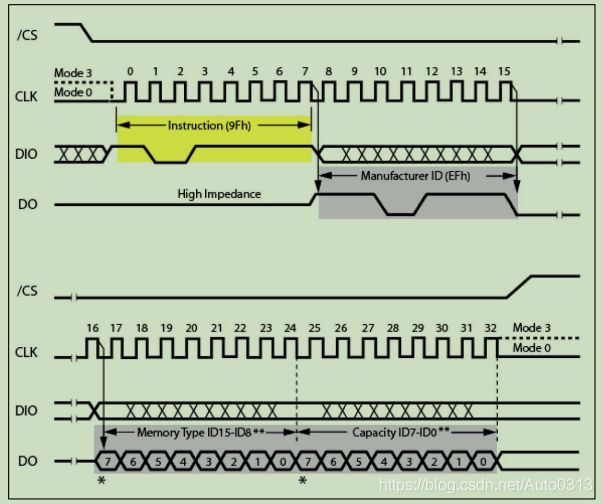
主机首先通过 MOSI 线向 FLASH 芯片发送第一个字节数据为“9F h”,当 FLASH 芯片收到该数据后,它会解读成主机向它发送了“JEDEC 指令”,然后它就作出该命令的响应:通过 MISO 线把它的厂商 ID(M7-M0)及芯片类型(ID15-0)发送给主机,主机接收到指令响应后可进行校验。常见的应用是主机端通过读取设备 ID 来测试硬件是否连接正常,或用于识别设备。
#define W25X_JedecDeviceID 0x9F
#define W25X_DeviceID 0xAB
/**
* @brief 读取FLASH ID
* @param 无
* @retval FLASH ID
*/
u32 SPI_FLASH_ReadID(void)
{
u32 Temp = 0, Temp0 = 0, Temp1 = 0, Temp2 = 0;
/* 开始通讯:CS低电平 */
SPI_FLASH_CS_LOW();
/* 发送JEDEC指令,读取ID */
SPI_FLASH_SendByte(W25X_JedecDeviceID);
/* 读取一个字节数据 */
Temp0 = SPI_FLASH_SendByte(Dummy_Byte);
/* 读取一个字节数据 */
Temp1 = SPI_FLASH_SendByte(Dummy_Byte);
/* 读取一个字节数据 */
Temp2 = SPI_FLASH_SendByte(Dummy_Byte);
/* 停止通讯:CS高电平 */
SPI_FLASH_CS_HIGH();
/*把数据组合起来,作为函数的返回值*/
Temp = (Temp0 << 16) | (Temp1 << 8) | Temp2;
return Temp;
}
/**
* @brief 读取FLASH Device ID
* @param 无
* @retval FLASH Device ID
*/
u32 SPI_FLASH_ReadDeviceID(void)
{
u32 Temp = 0;
/* Select the FLASH: Chip Select low */
SPI_FLASH_CS_LOW();
/* Send "RDID " instruction */
SPI_FLASH_SendByte(W25X_DeviceID);
SPI_FLASH_SendByte(Dummy_Byte);
SPI_FLASH_SendByte(Dummy_Byte);
SPI_FLASH_SendByte(Dummy_Byte);
/* Read a byte from the FLASH */
Temp = SPI_FLASH_SendByte(Dummy_Byte);
/* Deselect the FLASH: Chip Select high */
SPI_FLASH_CS_HIGH();
return Temp;
}
/*
* 函数名:main
* 描述 :主函数
* 输入 :无
* 输出 :无
*/
int main(void)
{
LED_GPIO_Config();
/* 配置串口为:115200 8-N-1 */
USART_Config();
printf("\r\n 串口通信正常!!!!! \r\n");
/* 8M串行flash W25Q64初始化 */
SPI_FLASH_Init();
/* 获取 Flash Device ID */
DeviceID = SPI_FLASH_ReadDeviceID();
Delay( 200 );
/* 获取 SPI Flash ID */
FlashID = SPI_FLASH_ReadID();
printf("\r\n FlashID is 0x%X, \
Manufacturer Device ID is 0x%X\r\n", FlashID, DeviceID);
while(1);
}
5 实验结果
