《算法手记》:功率谱的应用与代码实现
1. 背景:
早前接手一个小项目,使用振动传感器监测风机的开关。
这里不对单片机的使用和加速度传感器的数据采集多做说明。
数据准备:振动采样频率设置为400Hz。采样点为512个点。
由离散点FFT可知,实际可以监测的频率范围(400/2=200Hz)。
2. 期望结果
由离散的512个数据点,算出振动频率以及功率。
实际频率F 和 数据点横坐标x 成正比关系:
F = x (400/512)=0.78125 x3. 原始数据点
512个数据点是传感器连续采集得到的。他们是垂直于振动面(Z轴)的加速度值。用加速度值来描述某一瞬间的振动力。
根据加速度传感器芯片量程的配置的不同,原始数据点的数值也会不同。
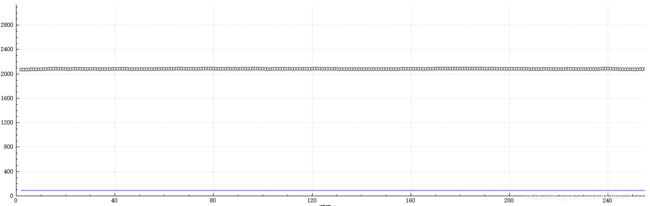
1. 如下图所示:取一半的点数(256)显示。配置传感器量程为正负16G。传感器水平放置时,Z轴的值表示地球引力G 。图中在2100左右。
2. 用手均匀摇动,显示如下:
下图共256个点,传感器1s钟输出400个点,也就是说图中的3.5个波实际上用了 256/400 =0.64 s 。
手摇的频率在 3.5/0.64 = 5.46875 Hz ,也就是一秒钟手摇了5.5下。(摇的确实很快)

3. 放在电脑主机的侧面,测量主机振动,观察到的原始波形如下:
因为是放在侧面,Z轴受地球引力作用变小(还剩40左右,没有矫正,不过不影响频率的求取)。

4. FFT算法
4.1 基础了解
要对离散的点进行求取频率的操作,首先想到的就是FFT算法,也就是快速傅里叶变换。高等数学,积分变换中有详细的理论解释。网上也有很多的前辈们做出了出色的整理。我这里就不多重复了,给出我当时直接引用的文章链接:
https://blog.csdn.net/yga_airspace/article/details/86688278
文章里面有封装好的代码,且入参说明的也很详细。
4.2 思路整理
将512个原始数据点 传递到FFT函数中,得到新的变化后的数组。数组的个数不变,数据由时域变到了频域。
4.3 代码实现
这里的函数原作者,定义形参时,采用了古老的格式。所以不要惊讶。记得包含头文件"math.h" 。
其中pr[512]数组 ,存512个原始数据,函数结束后,pr中的数据变为 变换后的频域数据模长(用来频谱显示)。
/*******************************************************************\
double pr[n] 存放n个采样输入的实部,返回离散傅里叶变换的摸
double pi[n] 存放n个采样输入的虚部
double fr[n] 返回离散傅里叶变换的n个实部
double fi[n] 返回离散傅里叶变换的n个虚部
int n 采样点数
int k 满足n=2^k
\*******************************************************************/
void kfft(pr,pi,n,k,fr,fi)
int n,k;
double pr[],pi[],fr[],fi[];
{
int it,m,is,i,j,nv,l0;
double p,q,s,vr,vi,poddr,poddi;
for (it=0; it<=n-1; it++) //将pr[0]和pi[0]循环赋值给fr[]和fi[]
{
m=it;
is=0;
for(i=0; i<=k-1; i++)
{
j=m/2;
is=2*is+(m-2*j);
m=j;
}
fr[it]=pr[is];
fi[it]=pi[is];
}
pr[0]=1.0;
pi[0]=0.0;
p=6.283185306/(1.0*n);
pr[1]=cos(p); //将w=e^-j2pi/n用欧拉公式表示
pi[1]=-sin(p);
for (i=2; i<=n-1; i++) //计算pr[]
{
p=pr[i-1]*pr[1];
q=pi[i-1]*pi[1];
s=(pr[i-1]+pi[i-1])*(pr[1]+pi[1]);
pr[i]=p-q; pi[i]=s-p-q;
}
for (it=0; it<=n-2; it=it+2)
{
vr=fr[it];
vi=fi[it];
fr[it]=vr+fr[it+1];
fi[it]=vi+fi[it+1];
fr[it+1]=vr-fr[it+1];
fi[it+1]=vi-fi[it+1];
}
m=n/2;
nv=2;
for (l0=k-2; l0>=0; l0--) //蝴蝶操作
{
m=m/2;
nv=2*nv;
for (it=0; it<=(m-1)*nv; it=it+nv)
for (j=0; j<=(nv/2)-1; j++)
{
p=pr[m*j]*fr[it+j+nv/2];
q=pi[m*j]*fi[it+j+nv/2];
s=pr[m*j]+pi[m*j];
s=s*(fr[it+j+nv/2]+fi[it+j+nv/2]);
poddr=p-q;
poddi=s-p-q;
fr[it+j+nv/2]=fr[it+j]-poddr;
fi[it+j+nv/2]=fi[it+j]-poddi;
fr[it+j]=fr[it+j]+poddr;
fi[it+j]=fi[it+j]+poddi;
}
}
for (i=0; i<=n-1; i++)
{
pr[i]=sqrt(fr[i]*fr[i]+fi[i]*fi[i]); //幅值计算
}
return;
}4.4 效果
将传感器放在电脑主机的侧面,用于测频率。电脑主机的硬盘转速是7200转每分钟,对应频率120Hz。
可以看到FFT变换得到的频谱可以提取出120Hz的振动。但低频的噪声影响很严重。这对于后期的数据处理,无疑是增加麻烦。
4.5 优缺点
优点:速度快,1s内可以完成计算。
缺点:随机性变化太大,不利于数据处理。
5. 功率谱
5.1 求取方法
实话实说,我也是看了很多对于频谱信号处理的方法,比较了各种方式的稳定性和易实现程度。选择使用功率谱,就是看到功率谱可以去除掉FFT中的随机性。功率谱的图像更加平稳。
网上前辈们给出了各种求取功率谱的方式:
(1)直接法求功率谱(2)相关函数法(3)相关AR模型法(4) BURG法
相关的知识,大家可以自行baiDu。
我选用的是相关函数法。
5.2 相关函数法
先求取自相关函数,再做频域变换。
5.3 代码实现
1. 在实现代码的过程中发现,需要先对原始值进行预处理。
求出512个原始点的平均值,再对每个原始值减去平均值。这样做的目的是,使得原始值数组分布在零线上下,消除直流分量的影响,重点关注值的变化。
如果不进行该操作,求得的功率谱图像数据整体会很大,频率变化影响的程度在图像上就会很微弱。看起来就是一个毫无波澜对数曲线。
2. 求自相关函数
这里是C语言实现matlab中的xcorr函数。
int xcorr(double *corr, double *x, double *y, int iDataN, int iSyncLength)
{
double r =0.0;
int i=0, j=0;
for (i = 0; i < iDataN- iSyncLength+1; i++)
{
r=0;
for(j=0; j < iSyncLength; j++)
{
r+=x[i+j]*y[j];
}
corr[i]=r;
}
for (i = iDataN- iSyncLength+1; i < iDataN; i++)
{
r=0;
for(j=0; j 3. 求功率谱
void PowerSpectrum()
{
//求自相关函数
xcorr(fr,pr,pr,NUM,NUM);
memcpy(pr,fr,NUM*sizeof(double));
//快速傅里叶变换
kfft(pr,pi,NUM,9,fr,fi);
//对数变换
{
uint16_t i;
for(i=0;i5.4 效果
1. 将传感器放在静止的桌面上。可以发现功率谱在没有明显的特征。
功率谱如下:

2. 将硬件传感器放在我的笔记本表面,硬盘转速也是7200转/min(频率是120Hz)。
功率谱如下:
