NAL unit 的解码(一)
HEVC视频编码的数据输出都是以NAL为基本单位进行输出的,
NAL的前两个BYTE是NAL的头,这两个BYTE的数据存储了当前NAL的类型,以及LayerID和TID,这两个的作用现在还没有完全弄懂
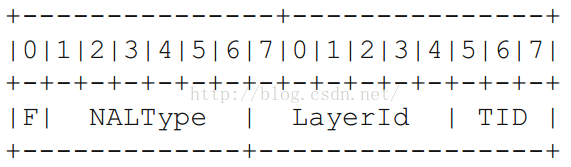
还有就是NAL分为VCL和non-VCL两大类,VCL是指携带编码数据的数据流,而non-VCL则是控制数据流,其中一个携带编码数据的数据流VCL包含了一个slice segment的数据。
下图为官方标准中NAL层的句法元素,且以伪代码的形式给出了解码过程:
在HM中由TAppDecTop::decode()调用byteStreamNALUnit(bytestream, nalUnit, stats)实现如上伪代码:
/**
* Parse an AVC AnnexB Bytestream bs to extract a single nalUnit
* while accumulating bytestream statistics into stats.
*
* Returns false if EOF was reached (NB, nalunit data may be valid),
* otherwise true.
*/
Bool
byteStreamNALUnit(
InputByteStream& bs,
vector& nalUnit,
AnnexBStats& stats)
{
Bool eof = false;
try
{
_byteStreamNALUnit(bs, nalUnit, stats); //!< 实际完成NAL解析工作的函数
}
catch (...) //!< 捕获所有异常
{
eof = true;
}
stats.m_numBytesInNALUnit = UInt(nalUnit.size());
return eof;
} 在分析NAL解析过程之前,先介绍几个会被调用到的子函数,以便更好地理解解析过程。
1. Bool eofBeforeNBytes(UInt n)
如果在读码流的接下来的n字节的过程中遇到了文件结束符,则该函数返回true,否则返回false。
/**
* returns true if an EOF will be encountered within the next
* n bytes.
*/
Bool eofBeforeNBytes(UInt n)
{
assert(n <= 4);
if (m_NumFutureBytes >= n) //!< m_NumFutureBytes大于等于n只会在该函数被调用2次及2次以上的情况下发生,满足该条件时无须继续读多余的字节,故返回false
return false;
n -= m_NumFutureBytes; //!< n先减去m_NumFutureBytes的目的是防止被函数peekBytes调用时再读入接下来的n字节数据
try
{
for (UInt i = 0; i < n; i++)
{
m_FutureBytes = (m_FutureBytes << 8) | m_Input.get(); //!< 每次读入一个字节,循环结束后,m_FutureBytes存放的是读入的n个字节的数据
m_NumFutureBytes++;
}
}
catch (...) //!< 出现异常即读到文件结尾,返回true
{
return true;
}
return false;
} 2. uint32_t peekBytes(UInt n)
该函数在不移动文件指针的前提下返回文件中接下来的n字节。实现的即是伪代码中的next_bits(n)的功能。
/**
* return the next n bytes in the stream without advancing
* the stream pointer.
*
* Returns: an unsigned integer representing an n byte bigendian
* word.
*
* If an attempt is made to read past EOF, an n-byte word is
* returned, but the portion that required input bytes beyond EOF
* is undefined.
*
*/
uint32_t peekBytes(UInt n)
{
eofBeforeNBytes(n);
return m_FutureBytes >> 8*(m_NumFutureBytes - n); //!< 若m_NumFutureBytes=4, n=3,则返回m_FutureBytes左移8位后(即有效数据位为3字节)的数据
} 3. uint8_t readByte()
该函数读文件的一个字节并返回。
/**
* consume and return one byte from the input.
*
* If bytestream is already at EOF prior to a call to readByte(),
* an exception std::ios_base::failure is thrown.
*/
uint8_t readByte()
{
if (!m_NumFutureBytes) //!< m_FutureBytes为NULL,则从文件中读入一个字节并返回
{
uint8_t byte = m_Input.get();
return byte;
}//! m_FutureBytes非NULL,则从它当中取出一个字节出来
m_NumFutureBytes--; //!< 计数值减1
uint8_t wanted_byte = m_FutureBytes >> 8*m_NumFutureBytes; //!< m_FutureBytes为4字节,取出有效数据中的最高字节
m_FutureBytes &= ~(0xff << 8*m_NumFutureBytes); //!< 对应位置的数据清零
return wanted_byte;
} 4. uint32_t readBytes(UInt n)
该函数读文件的n个字节并返回。
/**
* consume and return n bytes from the input. n bytes from
* bytestream are interpreted as bigendian when assembling
* the return value.
*/
uint32_t readBytes(UInt n)
{
uint32_t val = 0;
for (UInt i = 0; i < n; i++)
val = (val << 8) | readByte(); //!< 每次调用readByte()读入一个字节,通过对val左移8位且与输入值进行或运算实现将n个字节存储到val这个变量中
return val;
} ()
在完成了参数配置文件的解析之后,主函数中调用cTAppDecTop.decode()开始正式的解码过程。这个函数中首先调用
xCreateDecLib();
xInitDecLib();建立和初始化解码器的对象。下面的byteStreamNALUnit (bytestream, nalUnit, stats);函数进行NAL的解码过程,进入该函数,发现实际进行操作的是_byteStreamNALUnit(bs, nalUnit, stats);这个函数,看来关键就在这里。
为了更加清晰地与实验结果进行对照,用ultraedit打开之前编码生成的码流文件str.bin,查看其二进制码流结构,我们之前生成的码流数据如下图所示:

程序在运行中变量的变化值会同ultraedit中显示的值进行对照,以辅助我们的理解。
_byteStreamNALUnit(bs, nalUnit, stats)中,
while ((bs.eofBeforeNBytes(24/8)||bs.peekBytes(24/8) != 0x000001)
&&(bs.eofBeforeNBytes(32/8) || bs.peekBytes(32/8) != 0x00000001))的这个循环寻找第一个3或4字节长度,值为1的元素,并丢弃之前的0。
if (bs.peekBytes(24/8) != 0x000001)部分的作用是找出并丢弃zero_byte字段。
uint32_t start_code_prefix_one_3bytes = bs.readBytes(24/8);将提取并舍弃start_code_prefix_one字段。
while (bs.eofBeforeNBytes(24/8) || bs.peekBytes(24/8) > 2){nalUnit.push_back(bs.readByte());}的作用是正式读取nal单元的数据。在本例中,前四个字节“00 00 00 01”都将被舍弃,正式读取的数据时从那个0x40(64)开始读取,一直读到文件末尾,或者遇到后面三个字节为0或1为止。
while ((bs.eofBeforeNBytes(24/8) || bs.peekBytes(24/8) != 0x000001)&&(bs.eofBeforeNBytes(32/8) || bs.peekBytes(32/8) != 0x00000001))将会舍弃末尾的trailing_zero_8bits字段。
在本例中,NAL分析读取完成后,nalUnit中将包含从value=64开始的24个元素,并在
read(nalu, nalUnit);函数中进行下一步处理。
read(nalu, nalUnit)这个函数调用
convertPayloadToRBSP函数,将nalUnit中的元素转化为nal的参数数据。(该函数为什么会舍弃元素3?我没太弄明白)完成后,nalUnit的buf中共20个元素。之后调用
readNalUnitHeader函数,解析nal头数据。文献“
Overview of HEVC High-Level Syntax and Reference Picture Management
”中讲述了NAL的头数据结构,也就是下图所示:

这样
readNalUnitHeader函数的功能便很明朗了,其主要目的就是获取nal type和temporal_id这两部分信息。