Opencv3从头开始(十)Harris角点检测
Opencv3从头开始(十)Harris角点检测
如果某一点在任意方向的一个微小变动都会引起灰度很大的变化,那么我们就把它称之为角点
cornerHarris 函数用于在OpenCV中运行Harris角点检测算子处理图像
/*
Harris角点检测
*/
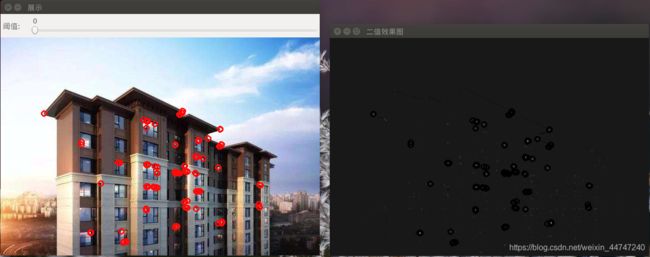
#includeimread(“建筑.jpeg”,0);
其中,imread->0表示直接读取灰度图像。
效果如下:

