智能家居硬件小制作(含源码)《手势识别控制器》基于PAJ7620手势模块、L298N驱动板、arduino
智能家居硬件小制作(含源码)《手势识别控制器》基于PAJ7620手势模块、L298N驱动板、arduino
目录
- 智能家居硬件小制作(含源码)《手势识别控制器》基于PAJ7620手势模块、L298N驱动板、arduino
- 介绍
- 材料
- PAJ7620手势模块
- 参数
- 硬件连接
- 库文件
- 使用
- 其他硬件
- 制作手势识别控制器
- 接线
- 源代码
介绍
手势识别控制器,基于arduino、PAJ7620传感器,可实现9种手势识别,应用于制作各种智能硬件
控制电视、窗帘、门、计算机、手机、智能车、机器人等各种硬件
以下以控制电机为例子
材料
- Arduino uno
- PAJ7620手势模块
- Base shield扩展板(可选),使接线简单
- L298N驱动板
- 直流电机
- 杜邦线
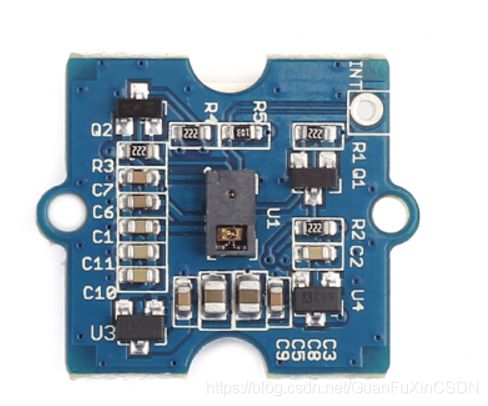
PAJ7620手势模块
L298N驱动板

PAJ7620手势模块
参数
主板支持:Arduino UNO / Seeeduino / Arduino Mega2560

模块支持9种手势,如下

硬件连接
-
你可以通过连接Base Shield 将此模块连接到 Base Shield 的 I2C 端口,如下

先把PAJ7620手势模块连接到 Base shield 的 I2C 端口上然后将 Base shield 连接到 Arduino UNO 上,即可 -
如果没有 Base Shield ,您也可以通过跳线将PAJ7620手势直接连接到 Arduino,方法如下
| Arduino UNO | Base Shield | PAJ7620手势模块 |
|---|---|---|
| 5V | I2C 端口 | VCC |
| GND | I2C 端口 | GND |
| SDA | I2C 端口 | SDA |
| SCL | I2C 端口 | SCL |
| Digit 2 | 未连接 | INT (Reserved pad) |
库文件
为了使用使用PAJ7620手势模块,我们需要引入一个库文件
库文件:PAJ7620
- 从上面链接将库代码的zip文件下载.
- 打开arduino IDE
- 点击【项目】----->【加载库】-----> 【添加.ZIP库】
- 选择刚刚下载的文件,打开即可
使用
官方的简单演示
以下简单的演示将向您展示一个非常简单的应用:当您向上移动时,红色的LED将被打开,反之红色的LED将被关闭。
#include 您可以自己查看 .h 和 .cpp 文件,以查看所有可用的功能
其他硬件
关于其他硬件有需要可以查看我的其他博客
Arduino小白入门全解,学习笔记
Arduino实践详细说明(三)L298N驱动直流电机
有能力的小伙伴可以考虑自己加上显示功能,我的lcd笔记如下
Arduino实践(二)lcd1602使用说明,源码
制作手势识别控制器
接线
L298N驱动和直流电机接线方法参考我的博客
Arduino实践详细说明(三)L298N驱动直流电机
PAJ7620手势接线方法如上述
这里就不再啰嗦重复,有疑问可评论
源代码
持续更新arduino 树莓派 python linux c语言等等
接到有帮助的话 求点赞 求关注❤️ 求分享
有问题可以评论
点关注,不迷路
如果有任何错误,如何建议,请批评指教,不胜感激 !
/*手势模块,控制l298n驱动电机*/
#include