muduo网络库:线程池的实现
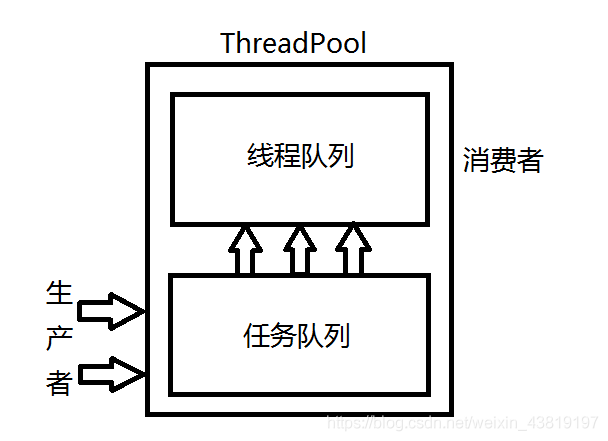
线程池问题本质上也是一个生产者-消费者问题
外部线程可以向线程池中的任务队列添加任务,相当于“生产者”;一旦任务队列中有任务,就唤醒线程队列中的线程来执行这些任务,这些线程就相当于“消费者”。模型如下图。
muduo ThreadPool类图:
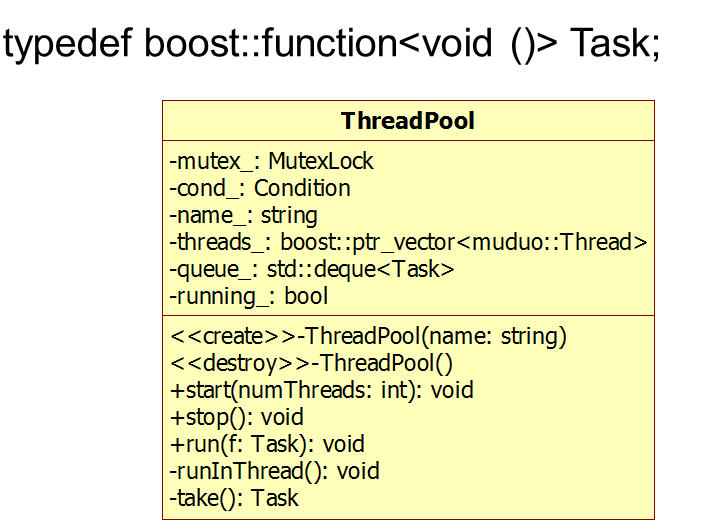
- 任务队列的实现用到了STL的deque容器
deque容器为一个给定类型的元素进行线性处理,像向量一样,它能够快速地随机访问任一个元素,并且能够高效地插入和删除容器的尾部元素。但它又与vector不同,deque支持高效插入和删除容器的头部元素,因此也叫做双端队列。
deque常用函数如下:
#include - 几个成员函数的说明
//文件名:ThreadPool.cc
// 启动线程池,启动的线程是固定个数的(numThreads)
void ThreadPool::start(int numThreads)
{
assert(threads_.empty()); // 断言线程池是空的
running_ = true; // 运行状态标记置为true
threads_.reserve(numThreads); // 为线程池预留指定大小的空间
// 创建线程
for (int i = 0; i < numThreads; ++i)
{
char id[32];
snprintf(id, sizeof id, "%d", i);
threads_.push_back(new muduo::Thread(
boost::bind(&ThreadPool::runInThread, this), name_+id));
threads_[i].start();
}
}
在线程池 start 的时候,使用new muduo::Thread(boost::bind(&ThreadPool::runInThread, this), name_+id)初始化,其中 boost::bind 是函数类型转换的函数,目的是将 ThreadPool::runInThread 转换为 void() ,这里 ThreadPool::runInThread 其实已经是 void() 函数了,为了使得程序兼容性更好,这么做可以使得细节更加完美。最后对每个线程执行 start() 函数,
void ThreadPool::runInThread()
{
try
{
while (running_)
{
Task task(take()); //取出一个任务
if (task)
{
task(); //执行该任务
}
}
}
catch (const Exception& ex)
{
fprintf(stderr, "exception caught in ThreadPool %s\n", name_.c_str());
fprintf(stderr, "reason: %s\n", ex.what());
fprintf(stderr, "stack trace: %s\n", ex.stackTrace());
abort();
}
catch (const std::exception& ex)
{
fprintf(stderr, "exception caught in ThreadPool %s\n", name_.c_str());
fprintf(stderr, "reason: %s\n", ex.what());
abort();
}
catch (...)
{
fprintf(stderr, "unknown exception caught in ThreadPool %s\n", name_.c_str());
throw; // rethrow
}
}
runInThread() 函数先通过当前线程的 running 的状态进行判断,然后执行 take() 取出一个任务,如果取出来了执行 take() 。 take() 函数如下:
ThreadPool::Task ThreadPool::take()
{
MutexLockGuard lock(mutex_);
// always use a while-loop, due to spurious wakeup
while (queue_.empty() && running_)
{
cond_.wait(); //条件变量用以当前队列为空时的等待
}
Task task;
if(!queue_.empty())
{
task = queue_.front();
queue_.pop_front();
}
return task;
}
接下来是,线程池的任务添加:
void ThreadPool::run(const Task& task)
{
if (threads_.empty())
{
task();
}
else
{
MutexLockGuard lock(mutex_);
queue_.push_back(task);
cond_.notify();
}
}
最后线程池中的线程销毁:
void ThreadPool::stop()
{
{
MutexLockGuard lock(mutex_);
running_ = false;
cond_.notifyAll();
}
for_each(threads_.begin(),
threads_.end(),
boost::bind(&muduo::Thread::join, _1));
}
通过上述代码可以看出这是一个固定大小的线程池,实现比较容易,将生产者-消费者模型的产品抽象成任务,从线程池中添加( run() ),同时利用线程池中的线程将这些任务完成。
最后任务什么时候截止呢?线程池什么时候才能执行 stop() ?
线程池的结束不是库的设计者能够决定呢,这是开发者(用户)决定的,让目前进行的线程池停止,必须保证当前所有的任务已经全部完成,从这个角度出发,我们可以将最后一个任务设计成一个结束的任务标志,怎么设计呢?这就可以采用CountDownLatch 了。CountDownLatch 是一个倒计时类:它的用途有:
(1)主线程发起多个子线程,等这些子线程各自都完成一定的任务之后,主线程才继续执行。通常用于主线程等待多个子线程完成初始化。
(2)主线程发起多个子线程,子线程都等待主线程,主线程完成其他一些任务之后通知所有子线程开始执行。通常用于多个子线程等待主线程发出“起跑”命令。
//设置结束标志
muduo::CountDownLatch latch(1);
pool.run(boost::bind(&muduo::CountDownLatch::countDown, &latch));
latch.wait();
pool.stop();