android10以后的版本才完全支持深色模式,测试下面两种方法判断系统是否深色模式都是有效的。publicstaticbooleanisDarkMode1(){if(Build.VERSION.SDK_INT
react-native android 环境搭建
环境:macjava版本:Java11最重要:一定要一定要一定要react涉及到很多的依赖下载,gradle和react相关的,第一次安装环境时有外网环境会快速很多。安装nodejs安装react-nativenpminstallreact-native-clinpminstallreact-native创建一个新项目react-nativeinitfirstReact替换gradle下载源rep
android查看so路径
之前遇到过一个问题,apk中有一个so无法确定其路径,是由哪个依赖引入的,网上查询一番后这里记录一下。build.gradle中添加如下任务//列出所有包含有so文件的库信息tasks.whenTaskAdded{task->if(task.name=='mergeDebugNativeLibs'){//如果是有多个flavor,则用mergeFlavorDebugNativeLibs的形式tas
OkHttp3源码解析--设计模式,android开发实习面试题
this.cache=builder.cache;}//构造者publicstaticfinalclassBuilder{Cachecache;…//构造cache属性值publicBuildercache(@NullableCachecache){this.cache=cache;returnthis;}//在build方法中真正创建OkHttpClient对象,并传入前面构造的属性值publi
Windows平台下Android Studio搭建Flutter开发环境的正确姿势(202506)
Flutter作为Google推出的跨平台移动应用开发框架,近年来获得了广泛关注。它允许开发者使用单一代码库构建iOS和Android应用,大大提高了开发效率。本文将带你一步步在Windows系统上搭建完整的Flutter开发环境。第一步:下载并安装FlutterSDK首先,我们需要获取FlutterSDK:访问Flutter官方中文文档的安装页面:https://docs.flutter.cn/
C++11中的std::function
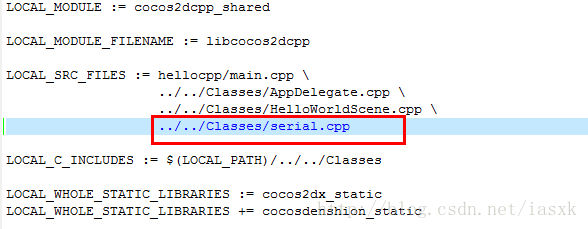
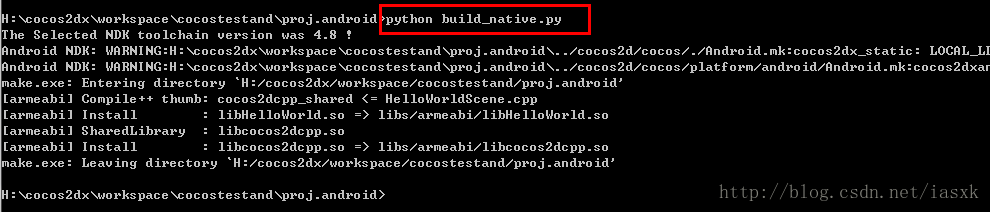
文章转载自:http://www.jellythink.com/archives/771看看这段代码先来看看下面这两行代码:std::functiononKeyPressed;std::functiononKeyReleased;这两行代码是从Cocos2d-x中摘出来的,重点是这两行代码的定义啊。std::function这是什么东西?如果你对上述两行代码表示毫无压力,那就不妨再看看本文,就当温
android中百度定位、城市选择列表,右侧字母展示
好久好久没光顾过自己空空的博客了,做项目的时候都是逛着别人的博客急着把功能实现,近来闲下来了总结总结。这个城市选择功能也是当时做项目急着实现从哪找来的框架不记得了,然后改改用到项目中来的。非常感谢提供最初源码的博主,主要的区别是添加了搜索功能、定位功能,把以前的操作本地数据库sqlite的部分,改为操作对assest文件的操作,封装的有百度地图定位方法、可删除的edittext。百度地图的key需
Android 15.0 根据app包名授予app监听系统通知权限
安卓兼职framework应用工程师
android15.0Rom定制化系列讲解androidromframework监听系统通知权限
1.概述在15.0的系统rom产品定制化开发中,在一些产品rom定制化开发中,系统内置的第三方app需要开启系统通知权限,然后可以在app中,监听系统所有通知,来做个通知中心的功能,所以需要授权获取系统通知的权限,然后来顺利的监听系统通知。来做系统通知的功能,接下来来实现这个功能2.根据app包名授予app监听系统通知权限的核心类packages/apps/Settings/src/com/and
flutter知识点
ZhDan91
flutter
#时隔4年了#4年前用flutter开发海外项目和医疗项目。绘制界面的语法与html还是较类似的。把这些封印的记忆和技术回顾一下,最开始是开发Android出身的,所以开发起flutter来依旧是用的androidstudio开发工具。整理下用到的知识点:整理来源:flutter面试题——基础篇(1)-CSDN博客1、Dart是单线程的。在单线程中以消息循环来运行的。其中敖汉两个任务队列。一个是微
android去除gps漂移代码,GPS漂移过滤算法
扇贝君
GPS漂移过滤算法基本思想:逐点过滤,再经过基础过滤后,进行判断运动状态,静止状态和运动中。如果静止,则使用电子围栏;如果运动,则先过滤大速度,再过滤加速度,然后过滤距离(包括超大距离,和速度相关距离)。对于要过滤的点,采用之前最近的可靠点,进行替换,同时,无效次数+1,如果后面是有效点,则无效次数-1,如果无效次数归0,认为这个点才是真正可靠点(无效次数为正时,都为要被替换的点)。如果遇到不定点
【Android】安卓四大组件之广播接收器(Broadcast Receiver):从基础到进阶
m0_59734531
AndroidandroidjavaBoradcast安卓四大组件
在Android开发中,广播接收器(BroadcastReceiver)是一个非常重要的组件,它能帮助应用接收来自系统或其他应用的事件通知,实现跨组件、跨应用的通信。大家可以把广播接收器想象成一个“收音机”。它的作用是监听系统或应用发出的“广播消息”,并在收到消息后执行相应的操作。(一)基础概念BroadcastReceiver用于监听系统或应用发出的广播事件,实现跨组件通信。其特点是发送方无需关
Qualcomm Hexagon DSP 与 AI Engine 架构深度分析:从微架构原理到 Android 部署实战
观熵
国产NPU×Android推理优化人工智能架构android
QualcommHexagonDSP与AIEngine架构深度分析:从微架构原理到Android部署实战关键词QualcommHexagon、AIEngine、HTA、HVX、HMX、Snapdragon、DSP推理加速、AIC、QNNSDK、Tensor编排、AndroidNNAPI、异构调度摘要HexagonDSP架构是QualcommSnapdragonSoC平台中长期演进的异构计算核心之一
【Android】安卓四大组件之内容提供者(ContentProvider):从基础到进阶
m0_59734531
AndroidandroidJavaContentProvider安卓四大组件
你手机里的通讯录,存储了所有联系人的信息。如果你想把这些联系人信息分享给其他App,就可以通过ContentProvider来实现。。一、什么是ContentProviderContentProvider是Android四大组件之一,负责实现跨应用程序的数据共享与访问,通过统一接口封装数据存储细节,提供标准化操作方式。其中主要功能包括:数据抽象层:将应用内部的数据(如SQLite数据库、文
Android 系统默认代码,如何屏蔽相册分享功能
Android系统默认代码,如何屏蔽相册分享功能开发云-一站式云服务平台diff--gita/packages/apps/Gallery2/src/com/android/gallery3d/app/GalleryActionBar.javab/packages/apps/Gallery2/src/com/android/gallery3d/app/GalleryActionBar.javaind
Android系统高通平台修改调整虚拟机堆内存大小
zzq1996
android
Android系统高通平台如何修改调整虚拟机堆内存大小按如下方式修改开发云-一站式云服务平台diff--gita/device/qcom/msm89/system.propb/device/qcom/msm89/system.propindex---a/device/qcom/msm8974/system.prop+++b/device/qcom/msm8974/system.prop@@@@de
Android 图像处理 - Bitmap 图像处理观察记录(基本图像复制、带目录创建的图像复制、字节流处理的图像复制、并发图像复制、单线程池顺序图像复制)
Bitmap图像处理观察记录1、基本图像复制从应用内部存储目录读取test.png使用BitmapFactory解码为Bitmap对象将Bitmap重新压缩保存为newTest.png操作成功,compress返回trueFilefile=newFile(getFilesDir(),"test.png");StringabsolutePath=file.getAbsolutePath();Bitm
Android开发中RxJava的使用与原理
你过来啊你
androidrxjava
RxJava是ReactiveExtensions在JVM上的实现,专为处理异步事件流和基于观察者模式的编程而设计。在Android开发中,它极大地简化了异步操作(如网络请求、数据库访问、UI事件处理)的管理、组合和线程调度,有效解决了回调地狱问题。一、RxJava核心概念Observable(可观察者):数据源或事件源。它负责发出数据项(onNext)或事件(成功完成onComplete/发生错
uniapp使用uni-push模拟推送
uniapp使用uni-push模拟推送第一步先去uniapp开发者中心添加开通uni-push功能这里的Android应用签名可以先用测试的官网有,可以先用这个测试官方测试链接文档地址在项目中的配置文件勾选组件中使用如果要实时可以去做全局ws//消息推送模版uni.createPushMessage({title:'您有新的待办事项!',//标题content:`待办事项内容为:测试测试`,//
使用Adb wifi Android真机运行Uni-app
pony1688
adbuni-appandroid
1、手机安装Adbwifi,我的用是这个:ADBWiFi(com.rair.adbwifi)-5.1.5-应用-酷安2、手机上运行ADB,运行后点击开始后界面如下3、如果手机已root,在电脑上运行adbconnect192.168.200.33:5555就可以连上了(注意:(1)不要进PowerShell,否则报错:无法将“adb”项识别为cmdlet、函数、脚本文件或可运行程序的名称。...(
uniapp对接unipush 1.0 ios/android
车轮滚滚__
uni-appiosandroid
配置注意需要打包自定义基座之后在手机上运行自定义基座才可以!官方有文档可以根据文档来我这里用的是1.0为什么没有2.0因为2.0要用uinicloud注意每次打包之后cid都会变cid用户的标识iduniapp通过这个id可以把消息推送给指定人前端代码前端要做的很简单直接放到app.vue中onLaunch钩子中即可麻烦的在后端和个推的对接onPushMessage(that){//#ifdefA
android studio调用python_Android Studio调用python运行thensorflow模型--CLE方案实现
孔良
androidstudio调用python
AndroidStudio调用python运行thensorflow模型--CLE方案实现AndroidStudio调用python运行thensorflow模型--CLE方案实现我使用的是虚拟android设备,故对应的CLE中库文件版本为/x86,你可以根据自己开发环境找到对应的版本。调用的python版本为3.7,以下为主要步骤:1、环境准备在官网下载最新的CLEforAndroid开发包,
在Android Studio中成功集成Python功能指南
本文还有配套的精品资源,点击获取简介:在移动应用开发中,由于Python的易用性和丰富的库,越来越多的开发者希望在Android应用中使用Python。Chaquopy作为一个开源的Android库,使得开发者可以在Android应用中直接运行Python代码。本文将详细介绍如何在AndroidStudio中集成Chaquopy,配置Python环境,调用Python代码,使用Python库,以及
Android 插件化实现原理详解
小李飞飞砖
android
Android插件化实现原理详解插件化技术是Android开发中一项重要的高级技术,它允许应用动态加载和执行未安装的APK模块。以下是插件化技术的核心实现原理和关键技术点:一、插件化核心思想宿主与插件:宿主(Host):主应用APK,提供运行环境插件(Plugin):未安装的APK/DEX/JAR,提供扩展功能核心目标:动态加载代码资源隔离与共享组件生命周期管理二、关键技术实现1.类加载机制(1)
Android 开发中插桩
小李飞飞砖
android
在Android开发中,插桩(Instrumentation)主要通过以下几种方式实现,涵盖编译时、构建时和运行时不同阶段:一、编译时插桩1.注解处理器(APT/KSP)技术:AnnotationProcessingTool/KotlinSymbolProcessing作用:解析自定义注解生成新代码场景:依赖注入(Dagger)、路由表生成(ARouter)特点:不能修改已有代码KSP比APT处理
android沙箱逃逸漏洞,【技术分享】沙盒逃逸技术详解(一)
weixin_40004051
android沙箱逃逸漏洞
预估稿费:170RMB投稿方式:发送邮件至linwei#360.cn,或登陆网页版在线投稿写在前面的话在过去的十多年里,针对恶意软件沙盒逃逸技术的分析已经成为了对抗高级持续性威胁的银弹,虽然这种技术变得越来越热门,但是恶意软件的开发者们似乎也找到了一种基于静态分析的方法(例如加密、混淆处理和反逆向保护等技术)来躲避传统反病毒安全工具的检测。因此,针对恶意软件沙盒逃逸技术的分析与研究已经成为了我们抵
Android Studio Logcat升级和还原旧版
黑崎焚天
操作Androidandroid
AS升级到2021.3.1后发现Logcat也能升级,点了之后就发现杯具了,界面完全不一样的没法直接过滤内容了,当然新的有新的优点,可以创建多个Logcat窗口,当然也可以过滤而且还是变着花样过滤:package:以包名过滤日志,预设package:mine表示用当前运行的应用包名进行过滤。package:com.uso6level:以优先级过滤日志。level:VERBOSE//显示所有信息le
Android-kotlin之Flow基础实战应用
每次的天空
androidkotlin开发语言
一、Flow是什么?Flow是一种用于处理异步数据流的强大工具,它基于协程实现,支持响应式编程模式。Flow是一个冷流(ColdStream),即只有在被收集(collect)时才会开始执行,类似于Kotlin序列(Sequence)的惰性求值特性。它可以异步地发射多个值,支持背压(Backpressure)机制。核心特点异步/非阻塞:Flow中的代码可以挂起而不阻塞线程。支持协程上下文:可以在不
Qt for Android 配置详细 (Windows下的)
总有刁民想爱朕ha
Qt开发安卓笔记作者:
[email protected]年1月讨论和交流一、安装jdk配置环境变量并测试java1.7的版本太高会出现问题。。我是用的是1.6点击jdk-6u21-windows-i586.exe即可,根据提示安装,安装路径可以复制,方便管理。jdk1.6安装在C:\Java\jdk1.6jre1.6安装在C:\Java\jre1.6安装后的文件和路径如上图。1.安
一、基本概述
Annontation是Java5开始引入的新特征。中文名称一般叫注解。它提供了一种安全的类似注释的机制,用来将任何的信息或元数据(metadata)与程序元素(类、方法、成员变量等)进行关联。
更通俗的意思是为程序的元素(类、方法、成员变量)加上更直观更明了的说明,这些说明信息是与程序的业务逻辑无关,并且是供指定的工具或
mysql优化特定类型的查询
annan211
java工作mysql
本节所介绍的查询优化的技巧都是和特定版本相关的,所以对于未来mysql的版本未必适用。
1 优化count查询
对于count这个函数的网上的大部分资料都是错误的或者是理解的都是一知半解的。在做优化之前我们先来看看
真正的count()函数的作用到底是什么。
count()是一个特殊的函数,有两种非常不同的作用,他可以统计某个列值的数量,也可以统计行数。
在统
MAC下安装多版本JDK和切换几种方式
棋子chessman
jdk
环境:
MAC AIR,OS X 10.10,64位
历史:
过去 Mac 上的 Java 都是由 Apple 自己提供,只支持到 Java 6,并且OS X 10.7 开始系统并不自带(而是可选安装)(原自带的是1.6)。
后来 Apple 加入 OpenJDK 继续支持 Java 6,而 Java 7 将由 Oracle 负责提供。
在终端中输入jav
javaScript (1)
Array_06
JavaScriptjava浏览器
JavaScript
1、运算符
运算符就是完成操作的一系列符号,它有七类: 赋值运算符(=,+=,-=,*=,/=,%=,<<=,>>=,|=,&=)、算术运算符(+,-,*,/,++,--,%)、比较运算符(>,<,<=,>=,==,===,!=,!==)、逻辑运算符(||,&&,!)、条件运算(?:)、位
国内顶级代码分享网站
袁潇含
javajdkoracle.netPHP
现在国内很多开源网站感觉都是为了利益而做的
当然利益是肯定的,否则谁也不会免费的去做网站
&
Elasticsearch、MongoDB和Hadoop比较
随意而生
mongodbhadoop搜索引擎
IT界在过去几年中出现了一个有趣的现象。很多新的技术出现并立即拥抱了“大数据”。稍微老一点的技术也会将大数据添进自己的特性,避免落大部队太远,我们看到了不同技术之间的边际的模糊化。假如你有诸如Elasticsearch或者Solr这样的搜索引擎,它们存储着JSON文档,MongoDB存着JSON文档,或者一堆JSON文档存放在一个Hadoop集群的HDFS中。你可以使用这三种配
mac os 系统科研软件总结
张亚雄
mac os
1.1 Microsoft Office for Mac 2011
大客户版,自行搜索。
1.2 Latex (MacTex):
系统环境:https://tug.org/mactex/
&nb
Maven实战(四)生命周期
AdyZhang
maven
1. 三套生命周期 Maven拥有三套相互独立的生命周期,它们分别为clean,default和site。 每个生命周期包含一些阶段,这些阶段是有顺序的,并且后面的阶段依赖于前面的阶段,用户和Maven最直接的交互方式就是调用这些生命周期阶段。 以clean生命周期为例,它包含的阶段有pre-clean, clean 和 post
Linux下Jenkins迁移
aijuans
Jenkins
1. 将Jenkins程序目录copy过去 源程序在/export/data/tomcatRoot/ofctest-jenkins.jd.com下面 tar -cvzf jenkins.tar.gz ofctest-jenkins.jd.com &
request.getInputStream()只能获取一次的问题
ayaoxinchao
requestInputstream
问题:在使用HTTP协议实现应用间接口通信时,服务端读取客户端请求过来的数据,会用到request.getInputStream(),第一次读取的时候可以读取到数据,但是接下来的读取操作都读取不到数据
原因: 1. 一个InputStream对象在被读取完成后,将无法被再次读取,始终返回-1; 2. InputStream并没有实现reset方法(可以重
数据库SQL优化大总结之 百万级数据库优化方案
BigBird2012
SQL优化
网上关于SQL优化的教程很多,但是比较杂乱。近日有空整理了一下,写出来跟大家分享一下,其中有错误和不足的地方,还请大家纠正补充。
这篇文章我花费了大量的时间查找资料、修改、排版,希望大家阅读之后,感觉好的话推荐给更多的人,让更多的人看到、纠正以及补充。
1.对查询进行优化,要尽量避免全表扫描,首先应考虑在 where 及 order by 涉及的列上建立索引。
2.应尽量避免在 where
jsonObject的使用
bijian1013
javajson
在项目中难免会用java处理json格式的数据,因此封装了一个JSONUtil工具类。
JSONUtil.java
package com.bijian.json.study;
import java.util.ArrayList;
import java.util.Date;
import java.util.HashMap;
[Zookeeper学习笔记之六]Zookeeper源代码分析之Zookeeper.WatchRegistration
bit1129
zookeeper
Zookeeper类是Zookeeper提供给用户访问Zookeeper service的主要API,它包含了如下几个内部类
首先分析它的内部类,从WatchRegistration开始,为指定的znode path注册一个Watcher,
/**
* Register a watcher for a particular p
【Scala十三】Scala核心七:部分应用函数
bit1129
scala
何为部分应用函数?
Partially applied function: A function that’s used in an expression and that misses some of its arguments.For instance, if function f has type Int => Int => Int, then f and f(1) are p
Tomcat Error listenerStart 终极大法
ronin47
tomcat
Tomcat报的错太含糊了,什么错都没报出来,只提示了Error listenerStart。为了调试,我们要获得更详细的日志。可以在WEB-INF/classes目录下新建一个文件叫logging.properties,内容如下
Java代码
handlers = org.apache.juli.FileHandler, java.util.logging.ConsoleHa
不用加减符号实现加减法
BrokenDreams
实现
今天有群友发了一个问题,要求不用加减符号(包括负号)来实现加减法。
分析一下,先看最简单的情况,假设1+1,按二进制算的话结果是10,可以看到从右往左的第一位变为0,第二位由于进位变为1。
读《研磨设计模式》-代码笔记-状态模式-State
bylijinnan
java设计模式
声明: 本文只为方便我个人查阅和理解,详细的分析以及源代码请移步 原作者的博客http://chjavach.iteye.com/
/*
当一个对象的内在状态改变时允许改变其行为,这个对象看起来像是改变了其类
状态模式主要解决的是当控制一个对象状态的条件表达式过于复杂时的情况
把状态的判断逻辑转移到表示不同状态的一系列类中,可以把复杂的判断逻辑简化
如果在
CUDA程序block和thread超出硬件允许值时的异常
cherishLC
CUDA
调用CUDA的核函数时指定block 和 thread大小,该大小可以是dim3类型的(三维数组),只用一维时可以是usigned int型的。
以下程序验证了当block或thread大小超出硬件允许值时会产生异常!!!GPU根本不会执行运算!!!
所以验证结果的正确性很重要!!!
在VS中创建CUDA项目会有一个模板,里面有更详细的状态验证。
以下程序在K5000GPU上跑的。
诡异的超长时间GC问题定位
chenchao051
jvmcmsGChbaseswap
HBase的GC策略采用PawNew+CMS, 这是大众化的配置,ParNew经常会出现停顿时间特别长的情况,有时候甚至长到令人发指的地步,例如请看如下日志:
2012-10-17T05:54:54.293+0800: 739594.224: [GC 739606.508: [ParNew: 996800K->110720K(996800K), 178.8826900 secs] 3700
maven环境快速搭建
daizj
安装mavne环境配置
一 下载maven
安装maven之前,要先安装jdk及配置JAVA_HOME环境变量。这个安装和配置java环境不用多说。
maven下载地址:http://maven.apache.org/download.html,目前最新的是这个apache-maven-3.2.5-bin.zip,然后解压在任意位置,最好地址中不要带中文字符,这个做java 的都知道,地址中出现中文会出现很多
PHP网站安全,避免PHP网站受到攻击的方法
dcj3sjt126com
PHP
对于PHP网站安全主要存在这样几种攻击方式:1、命令注入(Command Injection)2、eval注入(Eval Injection)3、客户端脚本攻击(Script Insertion)4、跨网站脚本攻击(Cross Site Scripting, XSS)5、SQL注入攻击(SQL injection)6、跨网站请求伪造攻击(Cross Site Request Forgerie
yii中给CGridView设置默认的排序根据时间倒序的方法
dcj3sjt126com
GridView
public function searchWithRelated() {
$criteria = new CDbCriteria;
$criteria->together = true; //without th
Java集合对象和数组对象的转换
dyy_gusi
java集合
在开发中,我们经常需要将集合对象(List,Set)转换为数组对象,或者将数组对象转换为集合对象。Java提供了相互转换的工具,但是我们使用的时候需要注意,不能乱用滥用。
1、数组对象转换为集合对象
最暴力的方式是new一个集合对象,然后遍历数组,依次将数组中的元素放入到新的集合中,但是这样做显然过
nginx同一主机部署多个应用
geeksun
nginx
近日有一需求,需要在一台主机上用nginx部署2个php应用,分别是wordpress和wiki,探索了半天,终于部署好了,下面把过程记录下来。
1. 在nginx下创建vhosts目录,用以放置vhost文件。
mkdir vhosts
2. 修改nginx.conf的配置, 在http节点增加下面内容设置,用来包含vhosts里的配置文件
#
ubuntu添加admin权限的用户账号
hongtoushizi
ubuntuuseradd
ubuntu创建账号的方式通常用到两种:useradd 和adduser . 本人尝试了useradd方法,步骤如下:
1:useradd
使用useradd时,如果后面不加任何参数的话,如:sudo useradd sysadm 创建出来的用户将是默认的三无用户:无home directory ,无密码,无系统shell。
顾应该如下操作:
第五章 常用Lua开发库2-JSON库、编码转换、字符串处理
jinnianshilongnian
nginxlua
JSON库
在进行数据传输时JSON格式目前应用广泛,因此从Lua对象与JSON字符串之间相互转换是一个非常常见的功能;目前Lua也有几个JSON库,本人用过cjson、dkjson。其中cjson的语法严格(比如unicode \u0020\u7eaf),要求符合规范否则会解析失败(如\u002),而dkjson相对宽松,当然也可以通过修改cjson的源码来完成
Spring定时器配置的两种实现方式OpenSymphony Quartz和java Timer详解
yaerfeng1989
timerquartz定时器
原创整理不易,转载请注明出处:Spring定时器配置的两种实现方式OpenSymphony Quartz和java Timer详解
代码下载地址:http://www.zuidaima.com/share/1772648445103104.htm
有两种流行Spring定时器配置:Java的Timer类和OpenSymphony的Quartz。
1.Java Timer定时
首先继承jav
Linux下df与du两个命令的差别?
pda158
linux
一、df显示文件系统的使用情况,与du比較,就是更全盘化。 最经常使用的就是 df -T,显示文件系统的使用情况并显示文件系统的类型。 举比例如以下: [root@localhost ~]# df -T Filesystem Type &n
[转]SQLite的工具类 ---- 通过反射把Cursor封装到VO对象
ctfzh
VOandroidsqlite反射Cursor
在写DAO层时,觉得从Cursor里一个一个的取出字段值再装到VO(值对象)里太麻烦了,就写了一个工具类,用到了反射,可以把查询记录的值装到对应的VO里,也可以生成该VO的List。
使用时需要注意:
考虑到Android的性能问题,VO没有使用Setter和Getter,而是直接用public的属性。
表中的字段名需要和VO的属性名一样,要是不一样就得在查询的SQL中
该学习笔记用到的Employee表
vipbooks
oraclesql工作
这是我在学习Oracle是用到的Employee表,在该笔记中用到的就是这张表,大家可以用它来学习和练习。
drop table Employee;
-- 员工信息表
create table Employee(
-- 员工编号
EmpNo number(3) primary key,
-- 姓