如何通俗地讲解 viterbi 算法?
原文链接
一、通俗地讲解 viterbi 算法
这篇回答你绝对看得懂!如下图,假如你从S和E之间找一条最短的路径,除了遍历完所有路径,还有什么更好的方法?
答案:viterbi (维特比)算法。
过程非常简单:
为了找出S到E之间的最短路径,我们先从S开始从左到右一列一列地来看。
首先起点是S,从S到A列的路径有三种可能:S-A1、S-A2、S-A3,如下图:
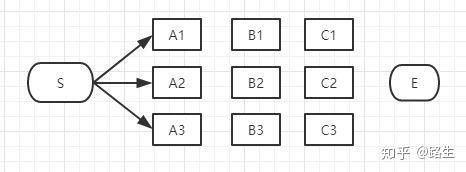
我们不能武断的说S-A1、S-A2、S-A3中的哪一段必定是全局最短路径中的一部分,目前为止任何一段都有可能是全局最短路径的备选项。
我们继续往右看,到了B列。B列的B1、B2、B3逐个分析。
先看B1: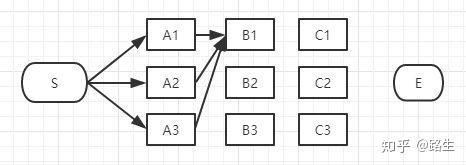
如上图,经过B1的所有路径只有3条:S-A1-B1S-A2-B1S-A3-B1以上这三条路径,我们肯定可以知道其中哪一条是最短的(把各路径每段距离加起来比较一下就知道哪条最短了)。假设S-A3-B1是最短的,那么我们就知道了经过B1的所有路径当中S-A3-B1是最短的,其它两条路径路径S-A1-B1和S-A2-B1都比S-A3-B1长,绝对不是目标答案,可以大胆地删掉了。删掉了不可能是答案的路径,就是viterbi算法(维特比算法)的重点,因为后面我们再也不用考虑这些被删掉的路径了。现在经过B1的所有路径只剩一条路径了,如下图:
接下来,我们继续看B2:

如上图,经过B2的路径有3条:S-A1-B2S-A2-B2S-A3-B2这三条路径中我们肯定也可以知道其中哪一条是最短的,假设S-A1-B2是最短的,那么我们就知道了经过B2的所有路径当中S-A1-B2是最短的,其它两条路径路径S-A2-B2和S-A3-B1也可以删掉了。经过B2所有路径只剩一条,如下图:

接下来我们继续看B3:

如上图,经过B3的路径也有3条:S-A1-B3S-A2-B3S-A3-B3这三条路径中我们也肯定可以知道其中哪一条是最短的,假设S-A2-B3是最短的,那么我们就知道了经过B3的所有路径当中S-A2-B3是最短的,其它两条路径路径S-A1-B3和S-A3-B3也可以删掉了。经过B3的所有路径只剩一条,如下图:

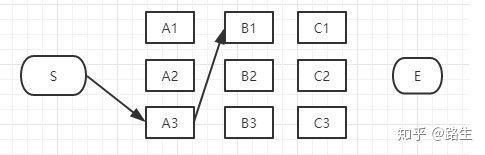
现在对于B列的所有节点我们都过了一遍,B列的每个节点我们都删除了一些不可能是答案的路径,看看我们剩下哪些备选的最短路径,如下图:
上图是我们我们删掉了其它不可能是最短路径的情况,留下了三个有可能是最短的路径:S-A3-B1、S-A1-B2、S-A2-B3。现在我们将这三条备选的路径汇总到下图:

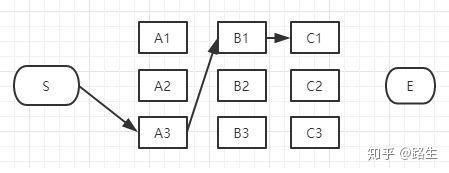
S-A3-B1、S-A1-B2、S-A2-B3都有可能是全局的最短路径的备选路径,我们还没有足够的信息判断哪一条一定是全局最短路径的子路径。 如果我们你认为没毛病就继续往下看C列,如果不理解,回头再看一遍,前面的步骤决定你是否能看懂viterbi算法(维特比算法)。 接下来讲到C列了,类似上面说的B列,我们从C1、C2、C3一个个节点分析。经过C1节点的路径有:S-A3-B1-C1、S-A1-B2-C1、S-A2-B3-C1
如图:

和B列的做法一样,从这三条路径中找到最短的那条(假定是S-A3-B1-C1),其它两条路径同样道理可以删掉了。那么经过C1的所有路径只剩一条,如下图:
同理,我们可以找到经过C2和C3节点的最短路径,汇总一下:

到达C列时最终也只剩3条备选的最短路径,我们仍然没有足够信息断定哪条才是全局最短。
最后,我们继续看E节点,才能得出最后的结论。
到E的路径也只有3种可能性:

E点已经是终点了,我们稍微对比一下这三条路径的总长度就能知道哪条是最短路径了。

在效率方面相对于粗暴地遍历所有路径,viterbi 维特比算法到达每一列的时候都会删除不符合最短路径要求的路径,大大降低时间复杂度。
viterbi算法果然很简单吧!
python版本实现代码如下:
1.带备忘的自顶向下法
import numpy as np
'''
N为隐藏状态数目
M为观测符号数目
A为状态转移矩阵:N×N
B为观测矩阵:N×M
pi为初始向量:1×N
T为观测序列长度
O为观测序列
'''
def Viterbi(M, N, A, B, pi, T, O):
delta = np.zeros(shape=(T, N)) # delta为局部概率,即到达某个特殊的中间状态时的概率
psi = np.zeros(shape=(T, N)) # psi为反向指针,指向最优的引发当前状态的前一时刻的某个状态
# 初始化,计算初始时刻所有状态的局部概率,反向指针均为0
# delta[0] = pi * B[:, O[1]-1]
for i in range(N):
delta[0][i] = pi[i] * B[i][O[0]-1]
psi[0][i] = 0
# 递推,递归计算除初始时刻外每个时间点的局部概率和反向指针
for t in range(1, T):
for i in range(N):
val = delta[t-1] * A[:, i]
# 计算t-1时刻每个状态的局部概率与到t时刻第i个状态的转移概率之积
maxval = max(val)
# 从t-1时刻到t时刻第i个状态的最大概率
maxvalind = np.argmax(val)
# 使从t-1时刻到t时刻第i个状态的概率为最大的t-1时刻的状态序号
delta[t][i] = maxval * B[i][O[t]-1]
# t时刻第j个状态的局部概率
psi[t][i] = maxvalind
# t时刻第i个状态的反向指针
# 终止,观测序列的概率等于T时刻的局部概率
P = max(delta[T-1])
I = [0] * T # q记录找出的隐藏状态路径
I[T-1] = np.argmax(delta[T-1]) + 1 # T时刻的隐藏状态
# 最优路径回溯
for t in range(T-2, -1, -1): # 回溯记录T-1时刻到起始(1)时刻的隐藏状态路径
I[t] = int(psi[t+1][I[t+1]-1] + 1) # 由t+1时刻的隐藏状态及其反向指针找到t时刻的隐藏状态,+1是为了输出状态序号1~3,而不是0~2
return I, P, delta
2.自底向上法
这种方法将子问题从小到大进行求解,在T时刻每个状态的最优路径已经全部求解出来,不需要第四步最优路径回溯。
def Viterbi(M, N, A, B, pi, T, O):
delta = np.zeros(shape=(T, N)) # delta为局部概率,即到达某个特殊的中间状态时的概率
path = {} # psi为反向指针,指向最优的引发当前状态的前一时刻的某个状态
# 初始化,计算初始时刻所有状态的局部概率,反向指针均为0
# delta[0] = pi * B[:, O[1]-1]
for i in range(N):
delta[0][i] = pi[i] * B[i][O[0] - 1]
path[i] = [i]
# 递推,递归计算除初始时刻外每个时间点的局部概率和反向指针
for t in range(1, T):
newpath = {}
for i in range(N):
maxval, ind = max([(delta[t - 1][j] * A[j][i], j) for j in range(N)])
# 找到从t-1时刻到t时刻第i个状态的最大概率和使从t-1时刻到t时刻第i个状态的概率为最大的t-1时刻的状态序号
delta[t][i] = maxval * B[i][O[t] - 1] # 更新局部概率
newpath[i] = path[ind] + [i] # 更新t时刻状态i的最优路径
path = newpath
# 终止,观测序列的概率等于T时刻的局部概率
P, last = max([(delta[T - 1][i], i) for i in range(N)]) # 输出最优概率和第T时刻哪个状态(last)达到最优概率
path[last] = [path[last][i] + 1 for i in range(N)] # 输出T时刻状态last的最优路径,+1是为了输出状态序号1~3,而不是0~2
return path[last], P, delta
维特比算法的时间复杂度为 O ( T ∗ N 2 ) O(T*N^{2}) O(T∗N2),其中T为观测序列长度,N为隐藏状态数目。(python内置函数max的时间复杂度为 O ( n ) ) O(n)) O(n))
通过《统计学习方法》中例10.3来验证算法的正确性:
A = [ 0.5 0.2 0.3 0.3 0.5 0.2 0.2 0.3 0.5 ] , B = [ 0.5 0.5 0.4 0.6 0.7 0.3 ] , π = ( 0.2 , 0.4 , 0.4 ) T A=\begin{bmatrix} 0.5 &0.2 &0.3 \\ 0.3 &0.5 &0.2 \\ 0.2 &0.3 &0.5 \end{bmatrix},B=\begin{bmatrix} 0.5 &0.5 \\ 0.4 &0.6 \\ 0.7 &0.3 \end{bmatrix},\pi =(0.2,0.4,0.4)^{T} A=⎣⎡0.50.30.20.20.50.30.30.20.5⎦⎤,B=⎣⎡0.50.40.70.50.60.3⎦⎤,π=(0.2,0.4,0.4)T
观测序列O=(红,白,红),试求最优状态序列,即最优路径 I ∗ = ( i 1 ∗ , i 2 ∗ , . . . , i T ∗ ) I^{\ast }=(i_{1}^{\ast },i_{2}^{\ast },...,i_{T}^{\ast }) I∗=(i1∗,i2∗,...,iT∗)
将模型及序列作为参数传入viterbi函数中:
M = 2
N = 3
A = np.array([[0.5, 0.2, 0.3],
[0.3, 0.5, 0.2],
[0.2, 0.3, 0.5]])
B = np.array([[0.5, 0.5],
[0.4, 0.6],
[0.7, 0.3]])
pi = np.array([0.2, 0.4, 0.4])
T = 3
O = [1, 2, 1]
计算最优状态序列、最优路径概率、局部概率矩阵:
q, p, delta = Viterbi(M, N, A, B, pi, T, O)
print("最优状态序列:", q)
print("最优路径概率:", p)
print("局部概率矩阵:", delta)
两种方法的结果相同:
最优状态序列: [3, 3, 3]
最优路径概率: 0.014699999999999998
局部概率矩阵: [[0.1 0.16 0.28 ]
[0.028 0.0504 0.042 ]
[0.00756 0.01008 0.0147 ]]
与例题中的结果一致。