智能小车蓝牙模块的学习
智能小车之蓝牙模块(一)
背景了解
本次课题为多功能智能导盲机器人的设计与开发 ,在研究单片机与蓝牙模块的连接方面有初步的了解和认识。
HC05蓝牙模块

根据查找资料,
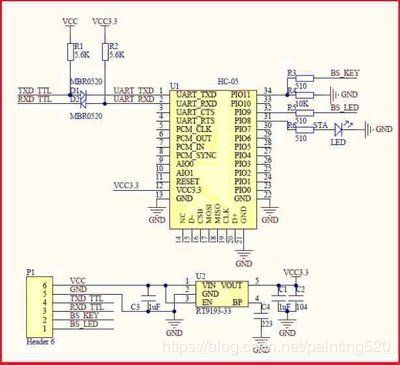
hc-05蓝牙模块外观与接脚:
命令响应模式接脚(key或en),用于启动at命令模式,用于调整蓝牙模块的设定
蓝牙模块HC05端口定义(6引脚)
state——蓝牙连接状态,未连接输出低,连接后输出高
TX——信号发
RX——信号收
GND——地
+5V
EN——使能端,需要进入AT模式时接3.3V,接单片机i/o引脚即可,高电平
蓝牙模块的AT命令模式与设定方法
蓝牙模块有两种模式:自动联机(透通模式)和命令响应(AT模式)。
state——接任意单片机i/o
rx——接usb转串口的tx端,P3^0
tx——接usb转串口的rx端,P3^1
gnd——接地
5v——接5V电
en——接任意单片机i/o,高电平
1、需要接通en,并给高电平
2、通信线路:电脑–>usb转串口–>hc05蓝牙模块(电脑与蓝牙模块间进行串口传输)
3、按住蓝牙模块的key键不松,单片机开发板上电,蓝牙模块指示灯进入慢闪状态,说明进入AT模式
4、通过电脑串口工具可以设置蓝牙的工作参数与状态
5、执行电脑串口工具SSCOM3.3,设置比特率38400,8位数据,1位停止位
6、发送测试指令AT\r\n,如果返回OK表示通信正常。
7、可以执行自己所需的命令了。
8、发送恢复默认状态指令AT+ORGL\r\n,如果返回OK表示设置成功。
出厂默认状态:
①.设备类:0
②.查询码:0x009e8b33
③.模块工作角色:Slave Mode
④.连接模式:指定专用蓝牙设备连接模式
⑤.串口参数:波特率—38400bits/s;停止位:1位;校验位:无
⑥.配对码:“1234”
⑦.设备名称:“H-C-2010-06-01”
…
9、设置波特率9600与单片机串口匹配,1停止位,0校验位
· 执行AT+UART=9600,1,0\r\n。返回OK
10、查看UART状态是否更改成功,执行AT+UART?,返回+UART:9600,1,0 OK
11、参数状态设置完毕,可断电,准备进入工作模式
进入自动连接工作模式进行蓝牙匹配
state——接任意单片机i/o
rx——接单片机的tx端,P3^1,与命令相应模式相反
tx——接单片机的rx端,P3^0
gnd——接地
5v——接5V电
en——可不接
1、不需要接通en
2、通信线路:手机蓝牙控制端–>hc05蓝牙模块–>单片机
3、单片机开发板上电,蓝牙模块指示灯进入快闪状态,说明进入自动连接工作模式
4、手机开蓝牙,即可搜到蓝牙模块,连接
5、打开手机端蓝牙串口工具,连接成功,蓝牙模块指示灯进入双闪状态
6、至此连接成功,准备发送数据
#include
void main(void)
{
while(1);
}
设置参数状态,匹配测试用上述几行代码。
体会
这次学习仅初步认识蓝牙模块hc05的一些运行指令和AT命令的认识。希望接下来的学习能认识更多。