图像小波去噪的Matlab函数解析与并行化实现思路
此文由本人@EthanLifeGreat/@EthanUnbeaten原创,首发于CSDN。转载表明出处,感谢。
概述
本文首先介绍了一个用Matlab进行图像小波去噪的实例;然后分析了小波去噪的流程和其对应的函数,其间通俗地解释了卷积的操作、阈值化处理;最后解释了小波去噪可以并行化实现的原因,所使用的思路。
本文以一个普通理工科生能读懂的角度出发,解决了实践问题、通俗理解问题和改造问题。
对于一位想要使用Matlab进行图片的小波去噪,但又不想了解公式、原理的同学,可以重点阅读第二章;对于一位想参考小波去噪流程以及离散小波变换(DWT)原理的同学,可以重点阅读第三章;对GPU计算感兴趣的同学可以重点阅读第四章。
目录
- 概述
- 1. 简介
- 2. 如何用Matlab去噪
- 2.1. 一个小波去噪实例
- 2.2. 例子函数解析
- 2.2.1. ddencmp函数
- 2.2.2. wdencmp函数
- 3. 小波去噪的流程
- 3.1. 用傅立叶变换理解小波去噪/压缩
- 3.2. 小波分解:wavedec2函数
- 3.2.1. 函数参数
- 3.2.1.1. 输入
- 图片
- 分解层数
- 小波基/滤波器
- 3.2.1.2. 输出
- 分解系数 C
- 刻度 S
- 3.2.2 分解过程
- 3.2.2.1. 层层下分
- 3.2.2.2. wavedec2的C向量的排列
- 3.2.2.3. wavedec2的S向量的排列
- S存在的意义
- 3.2.2.4.单步分解过程
- 卷积
- 行/列卷积
- 下采样
- 单步分解总结
- 3.3. 阈值化:wthcoef2函数
- 3.3.1. 软/硬阈值化:wthresh函数
- 3.4. 小波重构:waverec2函数
- 3.4.1. 输入/输出
- 3.4.2. 层层合并
- 3.4.3. 单步合成过程
- 去边:wkeep函数
- 3.5. 小波去噪流程总结
- 4. 小波去噪的并行化实现思路
- 4.1. 通用GPU计算与CUDA框架
- 4.1.1. 通用GPU计算
- 4.1.2. CUDA架构
- 4.2. 小波分解的并行思路
- 4.3. 阈值化的并行思路
- 5. 高斯白噪声与小波变换的关系及应用
- 5.1. 独立同分布变量与高斯白噪声
- 5.2. 高斯白噪声在小波变换中的性质
- 5.3. 阈值选择
- 6. 结语
- 注脚
1. 简介
本文是作者对实习项目的过程中产生的思考的记录。
原项目需求是得到实时化(至少80fps)显示的去噪图片,这要求我们极大地缩减小波去噪的用时。 因为 Matlab 环境下的小波去噪的处理时间约是一张图5秒钟1,完全不符合我们的要求。所以我们将Matlab的函数拆解开,先用 C++ 实现,再将 C++ 代码改成 CUDA C 2 代码而成功实现了小波去噪的并行化处理(通用GPU计算)。最终的处理时间在 100 fps 左右3,满足了项目的使用需求。
在这里,我希望共享我们的思考过程。但由于版权问题,不公布项目源代码。如有建议/疑惑,欢迎留言。
同时在此感谢我的老师和两位同学,他们提供了重要的解决思路,对此文作出了重大贡献。
2. 如何用Matlab去噪
我相信你之所以能看到这篇文章,很有可能是因为你需要完成一个图像去噪的流程,而正在查阅资料。若如此,我相信这一章节会对你有帮助。
在这一章节,我们讨论怎样实现一个简易的图像去噪流程,并对其中的内容进行简要分析。读完这一章,你应该能够用 Matlab 轻松实现一个最简单的小波去噪。
2.1. 一个小波去噪实例
这个实例摘自于Matlab Support,原网页
-
wdencmp – Matlab Support
-
ddencmp – Matlab Support
% 加载图片
load sinsin; % --------- 1.加载《sinsin》图片在变量X
Y = X+18*randn(size(X)); % --------- 2.对X施加噪声得到Y
% 去噪
[thr,sorh,keepapp] = ddencmp('den','wv',Y);
% --------- 3.求解Y的全局阈值记录在thr
xd = wdencmp('gbl',Y,'sym4',2,thr,sorh,keepapp);
% --------- 4.小波去噪
% 绘图
subplot(2,2,1);
imagesc(X);
title('Original Image'); % --------- 原图X
subplot(2,2,2);
imagesc(Y);
title('Noisy Image'); % --------- 噪声图Y
subplot(2,2,3);
imagesc(xd);
title('Denoised Image'); % --------- 降噪图xd
绘图的结果在官网上是这样的:
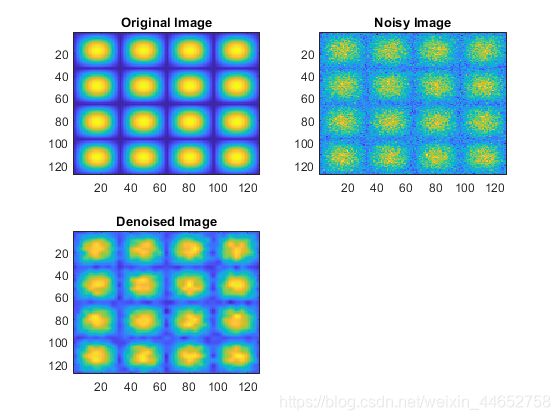
这段代码展示了一张图加噪后再进行小波去噪的结果。
实际上,要在Matlab里做到一个最简单的图像小波去噪,只需要两行代码——步骤3.和4.
步骤3.输入的三个参数意义分别是:
- ‘den’ 全称 denoise 表示去噪
- ‘wv’ 表示 小波变换
- Y 表示噪声图Y
输出的三个参数的意义是:
-
thr 全称 threshold 表示 阈值
-
sorh 全称 soft or hard 表示 硬/软降噪
-
keepapp 表示是否对分解出来的低频系数也降噪
以上三个参数都是中间过程量,如果你的目的只是会用,那么可以无视这三个解释。
步骤4.输入的前四个(后三个与3.输出的一模一样)参数意义是:
- ‘gbl’ 表示全局降噪,意味着分解出来的每一层使用的阈值都一样。也意味着thr只是一个数(而非向量)。
- Y 依然表示噪声图Y
- ‘sym4’ 表示小波基类型,有多种可选——参见Wavelet manager.
- 2 表示进行两层分解后去噪
2.2. 例子函数解析
下面我们来讲解一下这两位“集大成者”——ddencmp函数和wdencmp函数:
2.2.1. ddencmp函数
Default values for denoising or compression|去噪/压缩默认值
ddencmp在Matlab Support上的函数描述如下:
ddencmp returns default values for denoising or compression for the critically sampled discrete wavelet or wavelet packet transform.
正如前面解释过的函数输出一样,这个函数返回的是小波去噪/压缩的默认值(阈值、硬/软降噪、是否对分解出来的低频系数也降噪)。
在这里我们不细致地解析这些值是怎么得到的。我们可以先看看Matlab官方文档给出的文献:
[1] Donoho, D. L. “De-noising by Soft-Thresholding.” IEEE Transactions on Information Theory, Vol. 42, Number 3, pp. 613–627, 1995.
[2] Donoho, D. L., and Johnstone, I. M. “Ideal Spatial Adaptation by Wavelet Shrinkage.” Biometrika, Vol. 81, pp. 425–455, 1994.
[3] Donoho, D. L., and I. M. Johnstone. “Ideal denoising in an orthonormal basis chosen from a library of bases.” Comptes Rendus Acad. Sci. Paris, Ser. I, Vol. 319, pp. 1317–1322, 1994.
肤浅地看,这些文章都是这个叫DDL的人(作为第一作者)写的 (DDL可还行) 。官方文档里也提到了:
Use ddencmp to obtain the default global threshold for wavelet denoising. Demonstrate that the threshold is equal to the universal threshold of Donoho and Johnstone scaled by a robust estimate of the variance.
官方算出了一个值,并与ddencmp得到的值作对比,说明了这个算出来的 D&J的全局阈值 的计算过程。
在本文的并行化思路里,我们不讨论怎么得到阈值,不讨论怎么并行化计算阈值的步骤——我们假定阈值已经得到,并行化其他部分。
结语:ddencmp 函数通过给定的算法从原噪声图中计算出全局阈值、软/硬法和是否处理低频系数。但至于是怎么计算的,是否满足你的需求,还请参考文献。
2.2.2. wdencmp函数
Denoising or compression|(小波)去噪或压缩
这个函数的全称叫 Wavelet DeNoise CoMPress 小波去噪或压缩
在官方文档里有这么一句话
[XC, CXC, LXC, PERF0, PERFL2] = wdencmp(‘gbl’, X, wname, N, THR, SORH, KEEPAPP)
returns a denoised or compressed version XC of the input data X obtained by wavelet coefficients thresholding using the global positive threshold THR. [CXC,LXC] is the N-level wavelet decomposition structure of XC (see wavedec or wavedec2 for more information).
在上面的例子里,函数返回值被简化成了一个——XC,即图片X的降噪/压缩后的图。
后面的CXC和LXC是X进行小波分解并去噪后的结果,也是降噪图的小波分解结果——在wavedec2函数页也被分别称作C和S(coefficient和scale(系数和尺度)的简称)。
后面的两个返回参数PERF0和PERFL2反映去噪的程度,但与本文关系不大,故不深入讨论。
文档里还讲了,整个wdencmp函数的思路:
The denoising and compression procedures contain three steps:
- Decomposition.
- Thresholding.
- Reconstruction.
The two procedures differ in Step 2. In compression, for each level in the wavelet decomposition, a threshold is selected and hard thresholding is applied to the detail coefficients.
即
- Decomposition 小波变换分解
- Thresholding 阈值化
(这个不是很好翻译,大概意思是对分解后的结果进行处理,我们后面再细讲) - Reconstruction 逆小波变换重构
这个函数既可以实现小波去噪也可以实现小波压缩,而两者的区别在于步骤2——在压缩中每层的阈值都不一样,而且是用硬阈值处理。
至此,我们已经大致了解了wdencmp这个函数。至于这个函数具体的实现过程,我们在下一个章节讲述。
3. 小波去噪的流程
如上所述,小波去噪的过程分三步:分解、阈值化和重构。
将wdencmp拆开其实是三个函数,分别对应前面讲的三个步骤:
- 分解 – wavedec2函数
- 阈值化 – wthcoef2函数
- 重构 – waverec2函数
所谓知其然必知其所以然,在解释函数之前,我想先简单讲讲这样做的理论依据。小波变换的理论已经有非常多的细致的论述了。如果你学过高等数学/数学分析中的傅立叶变换,我希望从傅立叶变换的角度帮你理解小波去噪。
3.1. 用傅立叶变换理解小波去噪/压缩
傅立叶变换是把函数分解成正弦函数的和,小波变换也类似。在傅立叶变换里,我们需要求正弦和余弦函数的系数 a n a_n an 和 b n b_n bn 。而在小波变换里,正弦函数和余弦函数则对应的是小波基函数。小波分解呢,求的就是这些小波基的系数。
可以想像的是,如果删掉傅立叶变换得到的部分系数,如把 n > 3 n>3 n>3 时的 a n a_n an 和 b n b_n bn 置 0, 再进行逆傅立叶变换,这个函数将变成一个肉眼可见的正弦(组合)函数。当然n取3可能比较极端,但这只是为了形象地说明问题。这样的变换就大大简化了原本的函数。
不难理解,这对于压缩而言是个极大的利好——它一个函数压缩成了 5 个系数( a 0 a_0 a0, a 1 a_1 a1, a 2 a_2 a2, b 1 b_1 b1, b 2 b_2 b2)的集合。信息量少了很多。而对于去噪而言——虽然情况有些复杂——但如果勉强认为n很大时的 a n a_n an 和 b n b_n bn 代表了噪声的指标,那么我们也完成了去噪的过程。至于为什么它们代表了噪声的指标,又是怎么代表的,可以参考其它文献。
类似的,小波去噪也是把信号/图像分解成系数,再对系数进行操作。最后再逆变换(重构),得到去噪的信号/图。
3.2. 小波分解:wavedec2函数
Wavelet Decomposition 2D | 二维小波分解
本章节的所有内容,都从Matlab Support文档里展开。这些内容尚且没有中文翻译,所以我怎么讲也没问题,如果不理解这部分内容大家也可以参考原文。
3.2.1. 函数参数
先看看wavedec2函数的输入和输出:
Syntax|语法
- [C,S] = wavedec2(X,N,wname)
- [C,S] = wavedec2(X,N,Lod,Hid)
3.2.1.1. 输入
输入参数有三个:图片、层数和小波基/滤波器。
图片
X就是图片,二维数组,灰色图像。虽然也可以是RGB真彩图,但不在本文讨论范围。
分解层数
分解层数N代表了你要求分解多少层。对于不同的小波基和不同的图片的组合,有唯一确定的最大层数。至于怎么分解,我们下面会讲。
小波基/滤波器
调用方法有两种,前面一种就是用小波基,后面一种是用滤波器分解。两者天然等价。
Lod/Hid是Low/High Pass Decomposition 的简称,意思是低/高通分解(滤波器)。滤波器英文名也叫filter,也可以(被我)译为滤镜。每一个小波基天然地对应两个滤镜——低/高通分解滤波器(当然也对应两个重构滤波器),可以用这个函数得到:
[LoD,HiD,LoR,HiR] = wfilters(wname)
这些滤波器中的每一个都是一个一维数组,其中的值有正有负。
3.2.1.2. 输出
输出有二:C和S
分解系数 C
C实际上是coefficient(系数)的简写,正如上一章提到的,这些系数就类似于傅立叶变换里的 a n a_n an 和 b n b_n bn . 我们的目标是对这些系数进行处理后,再重新组合出图像。
为了方便保存,C被设定成了一个一维数组;而后面要讲的S,则是用于描述这个分解系数是如何存放的。
刻度 S
S是 scale 的简写,scale有很多的翻译方法:尺度、刻度、规模……但似乎都没能很好地描述这个S的作用——记录C中内容的存放规律。(如果你知道更好的翻译,请分享在留言区里)
事实上,官方文档里面说这是一个
Bookkeeping matrix.
簿记矩阵.
意义就是表示C里面的东西都:哪部分是干什么用的。
3.2.2 分解过程
3.2.2.1. 层层下分
正如前面所言,我们可以对图片分解很多层。每一层都由数张的图片组成。
我们还是用Matlab官方的图来说明:
原图: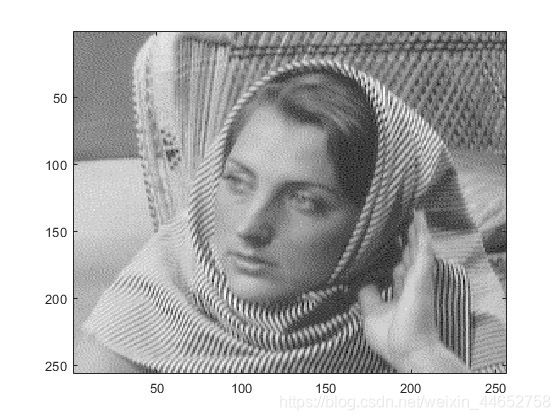
第一层分解结果: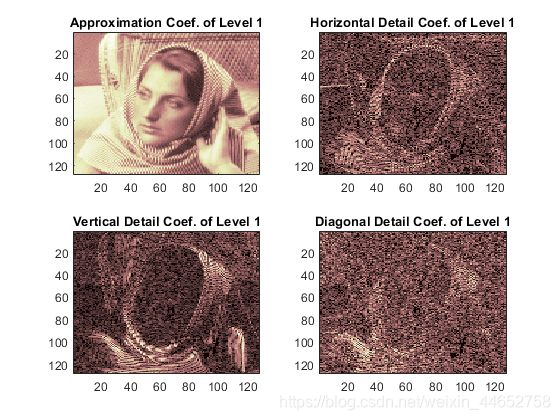
这是一张名为woman的图片在haar小波基下的第一层分解。分解后的图片变小了;原图的尺寸是 256 x 256,分解后的四张图大小都是 128 x 128.
直观地看,这四张图中只有左上角的 Approximation Coefficient (近似系数,简称A)和原图最像。右上角、左下角和右下角分别称为 水平细节(H)、垂直细节(V)和对角细节(D)
问题来了:这只是第一层分解,那要再往下分解怎么分呢?下一步,我们只分解和原图最像的A. 结果如下(还是官网原图):
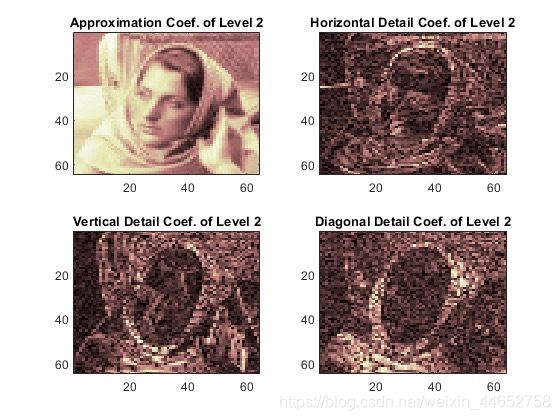
是不是又小了一圈?变成 64 x 64 了吧:)
所以聪明的你已经发现了规律——每一次将图分成四个小图AHVD,下一层分解只分解A,重复操作就可以一层层分解了!操作流程可以简化如下(依旧是官网的原图):
 其中s表示原图; c A n cA_n cAn表示第n层的A; c D n h cD_n^h cDnh表示第n层的H;D和V以此类推。
其中s表示原图; c A n cA_n cAn表示第n层的A; c D n h cD_n^h cDnh表示第n层的H;D和V以此类推。
知道了层次过程,我们接着就来解答之前留下的一个疑问——C中的元素到底是怎么排列的,以及S是怎么指导它们排列的。
3.2.2.2. wavedec2的C向量的排列
先说C,根据上面的结论,我们知道C中的(图片)元素应该有 3 N + 1 3N+1 3N+1 个/张(N表示最大分解层数,下同)。在Matlab存储时从左至右是这么排列的:
A(N), H(N), V(N), D(N), H(N-1), V(N-1), D(N-1), …, H(1), V(1), D(1)
其中的A(k)等价于上图的 c A k cA_k cAk;H(k)等价于 c D n h cD_n^h cDnh;D和V以此类推。
这就是C的排列方式。注意,这里C是一个行向量,而且每一个AHVD也都是行向量。你可能会感到奇怪;这AHVD不都是图片么?怎么合起来变成一维行向量了?其实是为了方便存储,把它们按照列优先的方式(Matlab固有方式)排列成了一维的向量。
(其实我之所以没有统一AHVD的表达,是因为官网真的给出了这些不同的表达方式;更过分的是,后面还有一种表达方式。所以,读者应自己对AHVD产生清晰的认识:)
3.2.2.3. wavedec2的S向量的排列
现在看S向量,在灰度图中,它是一个二维向量/矩阵,大小是 (N + 2) x 2.
其中N表示分解的总层数。宽度 2 表示每一层图片的长、宽两项;N + 2 项表示原图、N层的H V D、最深层A共 (1 + N + 1 = N + 2)项。具体表示见下图。
这张图展示了一个原大小为 512 x 512 的灰度图,分解 4 次至 32 x 32 大小时产生的 S 向量。箭头代表该行指向的图片的大小。
S存在的意义
看到这里,带着思考的你很可能会问:S存在的意义是什么?
我想说的是,如果我现在有一个已经算出来,排列好的C向量。那么(只要同一层的AHVD的大小总是相同,)我是不是只需要知道分解的层数和最小的A/H/V/D的大小,就可以恢复出原图呢?
如若真是这样,那我的S可以直接简化为 “层数 + A的大小” 一共三个信息量。(注意,整个分解完的C里面只有一个A矩阵,所以A在这里不引起歧义)
明明只需要3个数字,那为啥Matlab还要费心做一个这么大的矩阵,把每一层图片大小都记录下来呢?
如果你也有这样的疑惑,不妨设想一下,我们以上图为例,如果原图片不是 512 x 512,而是 513 x 513 呢?那么此时所有的分解结果都不变(分解结果向下取整),所以重构的时候就自然恢复出了 512 x 512 的图片。当然你可能会说:那有什么关系?不就是少了一行一列嘛,我这么大一张图,损失这么点可以接受。那我们再换成 511 x 511 来分解 4 层,过程我就不展示了,留作课后作业大家完成。 恢复出来的结果是 496 x 496。还能接受么?
当然你可能会说世界上哪有 511 x 511 这么吊诡的图片?
作为一名数学系学生,我反正不能接受;作为一个成熟的商业软件,Matlab 亦不能接受。
所以,保留每一层分解的图片大小是完整恢复原图的必要条件。这就是S存在的意义。
3.2.2.4.单步分解过程
现在我们已经知道了,每次分解出新的一层,都是对A进行一通操作,得到四张“小图片”。那么,究竟怎么分出四张图呢?
作为一篇普通理工生也可以读懂的文章,这里不讨论数学公式,只讲实操。
“首当其冲”地,还是官方的图:
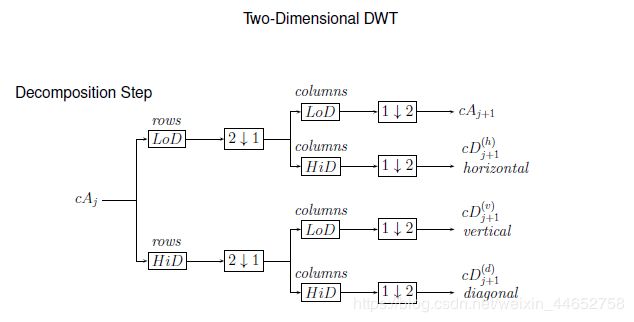
有了前面的知识铺垫,你应该能够清楚地认识到:这个图表示的是,第 j 层的 A,通过一通操作变成了 第 j + 1 层的 AHVD.
直接讲有点麻烦,我们还是看一下官网的图例:

对应着翻译过来就是(符号我就不画了):
其中
- 对列下采样:保留偶数序数的列
- 对行下采样:保留偶数序数的行
- 用滤镜 X 对行进行卷积
- 用滤镜 X 对列进行卷积4
所以按照先后顺序,一个A要经过一次卷积、一次下采样、一次卷积再一次下采样得到下一层的 A/H/V/D.
接下来我们就讲讲,什么是个卷积,什么又是个下采样。
卷积
如果你学过Deep Learning(深度学习),那么你一定对卷积这个词再熟悉不过了;但对于某些曾被DL劝退的人而言,我们仍需进行一些简单、通俗的解释。
在这里,我们不需要知道卷积是做什么的5,也不需要知道为什么要做卷积,我们只需要知道这个卷积是怎么完成的就可以了。
我从他人的博客上借鉴了这张图:
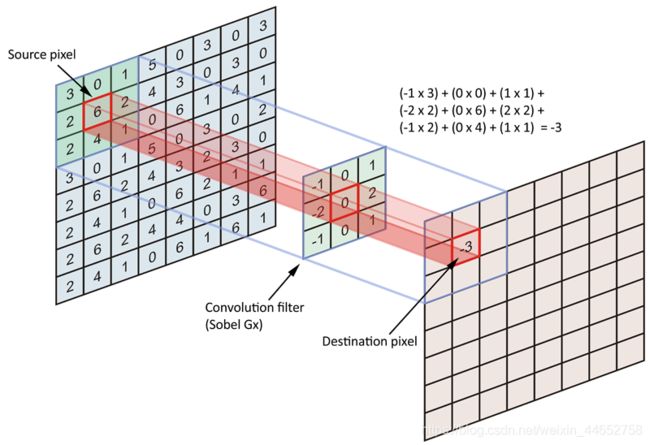
图中最左边的矩阵是原图,中间的小矩阵是所谓的滤镜filter,最右边是卷积结果图。这张图展示的是滤镜中心0对准原图中的数字6时得到的结果-3,然后九个位置的九对数字分别相乘,作和(如图中式子)结果写在结果图中对应(原图的6)的位置。
任由滤镜在原图上滑动,并进行如上的作和操作。我们可以想像,数字可以填满结果图中的每一个空——除去最外面的一圈。这是卷积的天然特性;结果图总比原图小。那怎么办呢?
好办,我们事先把原图像扩大一圈,再做卷积,就可以保证结果图和原图一样大了。好想法,那么我们怎么扩大呢?
有许多办法,最简单的有两种:
- 零延拓(Matlab: zpd)
将要填充的边界全部写成0 - 对称延拓(Matlab: sym)
将边界当作对称线,顶点当作对称点扩大图像
行/列卷积
上面我们简单讲了卷积的操作。但wavedec2函数里说的按行/列卷积又是什么样的呢?
还记得我们刚讲滤镜的时候说过,wavedec2里的每个滤镜都是一个一维数组吧。所以其实按行/列卷积的意思就是:把滤镜横/竖着卷积。
对于按行卷积,我做了一个简单的示意图:
这张动图展示了:原图 8 x 8大小,滤镜长度3,原图填充后行卷积的例子。深蓝色线条表示对应位置相乘,浅蓝色线条表示作和,与上一张图中显示的计算过程类似。
列卷积类似(列填充,滤镜竖直)。
在这个例子里,每一次卷积的输出结果应是与延拓前矩阵大小相同的矩阵。即保证输出与输入图片大小相同。
至此,我们已经讲完了wavedec2里卷积的部分。现在来讲讲下采样。
下采样
尽管其正当性一言难尽,但行/列下采样操作起来十分简单;保留偶数序数的行/列,丢掉剩余的行/列。

所以一个大小为 512 x 512 的图经过一次列的下采样,大小就变成了 512 x 256. 一张这样大小的图,经过一次行的下采样,就会变成 256 x 256 大小。形象直观。没有更多的解释余地。
单步分解总结
单步分解把某一层的A(最初为原图)分解成下一层的AHVD.
其步骤是:
- 行卷积
- 列下采样
- 列卷积
- 行下采样
从由于卷积核/滤镜的不同,使得分解的结果不同:
- 如果两次均为低通,得到A图;
- 如果先低通后高通,得到H图;
- 如果先高通后低通,得到V图;
- 如果两次均为高通,得到D图。
至此,我们已经讲完了wavedec2函数以及小波分解的实际操作流程。下面我们介绍小波去噪的核心程序:阈值化。
3.3. 阈值化:wthcoef2函数
Wavelet coefficient thresholding 2-D | 小波系数阈值化2D
阈值化虽说是去噪的核心,但实现起来非常简单。就是对分解得到的系数进行修改,用给定的阈值来修改。
wthcoef2函数所做的事情其实只有两件:
- 找到需要修改的部分系数
- 用相应的阈值修改这部分系数(调用wthresh函数)
首先是找到需要修改的部分系数,下面是对最常用的一个输入的解读。
NC = wthcoef2(‘type’,C,S,N,T,SORH)
For ‘type’ = ‘h’ ( ‘v’ or ‘d’), NC = wthcoef2(‘type’,C,S,N,T,SORH) returns the horizontal (vertical or diagonal, respectively) coefficients obtained from the wavelet decomposition structure [C,S] (see wavedec2 for more information), by soft (if SORH =‘s’) or hard (if SORH =‘h’) thresholding defined in vectors N and T. N contains the detail levels to be thresholded and T the corresponding thresholds. N and T must be of the same length. The vector N must be such that 1 ≤ N(i) ≤ size(S,1)-2.
‘type’ 可以输入三种字符 ‘h’, ‘v’, ‘d’,分别表示对给定C中的所有H/V/D进行处理;C和S是我们的老朋友了,wavedec2得到的结果;N和T是等长的一维数组,N表示要处理的层数(第几层),而T表示N对应的层数对应的阈值;SORH表示软/硬处理。
N和T的这种给人留了很多想象的空间,在这里我展示一种常见的调用方法;对于分解了 6 层的系数,N和T可以这样表示:
N = [1, 2, 3, 4, 5, 6];
T = [310, 305, 300, 295, 290, 295]; % 这里的六个系数是随便取的,不具有实际内涵
一旦确定了要处理的部分,与其对应的阈值,wthcoef2就会依次调用wthresh函数进行软/硬阈值化处理。
3.3.1. 软/硬阈值化:wthresh函数
Soft or hard thresholding|软或硬阈值化
通俗意义上我们将阈值理解为一个最小值。比如听觉阈值,指的是能听见最小声音的分贝数。
在去噪里,类似地,我们把低于最小值(阈值)的系数去掉(置为0);而对于大于阈值的系数:
- 如果保持不变就是硬阈值化
- 如果减去阈值就是软阈值化
为什么软阈值化要将原来的值减去阈值呢?看看Matlab官方的这张图就能理解了。

在这张图里,阈值为 0.4,两种处理结果中原信号低于0.4的部分都变成了0。此外,软处理还把大于0.4的部分都减去了0.4,这维持了原信号的光滑度,故称为软处理。
软阈值化是为了“小波域产生突变,导致去噪后结果产生局部的抖动”(百度知道)。
硬阈值化更适用于图像压缩;把系数置为0的目的是减少信息量。而对大于阈值的部分不做处理是为了与原图更相近。
//下面展示一个图像小波变换软/硬阈值化后的区别:
3.4. 小波重构:waverec2函数
2-D wavelet reconstruction|2维小波重构
有了前面的铺垫,再讲重构就很简单了;小波重构是小波分解的逆过程。在Matlab Support上有一个例子。在这个例子中,作者对woman这张图片先进行wavedec2分解,之后直接以同样的参数进行waverec2重构,并对两张图片进行对比。结果显示,两张图对应像素的差异的最大值只有2.5565e-10
3.4.1. 输入/输出
我们还是简单了解一下这个函数的调用方式吧:
X = waverec2(C,S,wname)
X = waverec2(C,S,Lo_R,Hi_R)
通过小波基或者高、低通滤镜对C和S操作合成出图片;
- C:C既可以是阈值化后的也可以是没有经过阈值化而刚分解的C
- S:S一直都是wavedec2分解出来的S,没有改变
- wname:小波基
- Lo_R/Hi_R:低/高通合成滤镜,也是由小波基唯一决定的
提示:分解滤镜和合成滤镜其实是同一组数据的互反:
还是用官网的图片来说明:

这张图展示了db5的四个滤镜(四个一维数组)中数字的大小。
可以明显地看出来:低通滤镜LoD和LoR两个数组中的元素是一样的,但是顺序恰好完全颠倒。高通滤镜亦如是。
这也是我选择将filter翻译为滤镜而非滤波器的原因之一;这些数组就像是一面透镜,图片从一面穿向另一面时被分解,回穿时被组合。
3.4.2. 层层合并
整体上,与分解的宏观过程相反:重构是从最深层把每一层的A/H/V/D组合起来,形成上一层的A。并重复这个过程,直到恢复到“第0层”。
3.4.3. 单步合成过程
那么单步具体怎么合成呢?类似地,我们来看看它的流程图,同样摘自官网.

还是解释一下原图里的图例(依次翻译):
- 列上采样:在奇序数列处填0
- 行上采样:在奇序数行处填0
- 行卷积:用滤镜X对行卷积
- 列卷积:用滤镜X对列卷积
你应该能注意到,在最后,我们多出了一个分解中没有的流程——wkeep函数。它又是做什么的呢?
去边:wkeep函数
Keep part of vector or matrix|部分保留向量/矩阵
看看这个简介,话语中就透露着稚气。是的,对比前面的那些函数,这算是最简单的函数(之一)了。我们只用一个例子来解释:
% For a matrix.
x = magic(5)
x =
17 24 1 8 15
23 5 7 14 16
4 6 13 20 22
10 12 19 21 3
11 18 25 2 9
y = wkeep(x,[3 2])
y =
5 7
6 13
12 19
在这里,wkeep保留了这个矩阵中最中间的3行2列。
3.5. 小波去噪流程总结
至此,我们已经完整地分析了小波去噪的流程:
- 将图片通过离散小波变换分解为系数
—— 对应 wavedec2 函数 - 对系数进行修改(阈值化)
—— 对应 wthcoef2 函数 - 将修改后的系数重新组合为图片
—— 对应 waverec2 函数
下面,我们将进入小波去噪的并行化思路的介绍。
4. 小波去噪的并行化实现思路
这一章简单讨论小波去噪并行化的思路与我们选择的方向。
4.1. 通用GPU计算与CUDA框架
什么是并行化?什么是GPU?什么又是通用GPU计算?什么又是CUDA?
4.1.1. 通用GPU计算
我从别人的博客里搬了一段话:
GPU英文全称Graphic Processing Unit,中文翻译为”图形处理器”。GPU从诞生之日起就以超越摩尔定律的速度发展,运算能力不断提升。业界很大研究者注意到GPU进行计算的潜力,于2003年SIGGRAPH大会上提出了GPGPU(General-purposecomputing on graphics units)的概念。GPU逐渐从由若干专用的固定功能单元(Fixed Function Unit)组成的专用并行处理器向以通用计算资源为主,固定功能单元为辅的架构转变。
————————————————
版权声明:本文为CSDN博主「fengbingchun」的原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/fengbingchun/article/details/19619491
简单但不那么精确地说,就是:以前用来作图形显示的所谓“显卡”6,今天被拿来当成计算器了。而且效果还不错。然后这种起计算作用的GPU就叫做通用GPU。
那为什么GPU(有些时候)效果就值得比CPU好呢?我大i9它不香么? 其实是各有所长罢了。我们先用一张图来理解这个事情:
蓝色的是CPU的计算核心,绿色的是GPU的计算核心(此处数量不代表真实数字)。此图想表达的是:CPU核心少,但每个核心的计算能力相当强大;GPU核心多,但每个块儿的计算能力相当单薄。
我曾经听过一个我认为很贴切的比喻:
CPU是一个老教授,积分微分都能干;GPU是一群小学生,每个人能力有限,但数量庞大。
很多情况下也可以用搬砖做比喻的话那就是:一个大力士与一群瘦竹竿。在砖的数量很多时,你肯定愿意选一群人来帮你搬砖,尽管每个人一次搬的量要少一些。等会我们会看到:做卷积就是类似于这种搬砖的过程。
概括性地讲:CPU做事效率高,但得一件一件接着做(串行处理);GPU做事效率一般,但可以成百上千件事同时干(并行处理)。
4.1.2. CUDA架构
我们刚才讲了,某些时候GPU可以替代CPU做计算,这被称为通用GPU计算。
CUDA架构则允许我们用类C语言对(NVIDIA的)GPU进行编程,使之用于计算。这样的类C语言被称为CUDA C或C的CUDA拓展。
刚才说了,通用GPU计算有一个通俗的比喻是:指挥一群人搬砖。但问题是,怎么指挥?CUDA提供的办法是:
编号。 每个工人对应一个号码比如1-100。而我们有10000块砖需要从A地搬到B地,我们分别对砖块也标记上1-10000。然后我们下令:每个工人将所有编号为 自 己 编 号 + k ∗ 100 自己编号+k*100 自己编号+k∗100的砖从A地搬到B地,其中k取0到99。
在这里,砖块上的号码就叫做“线程号7”。有10000块砖就有10000件事等着做8,就有10000个所谓的“线程”。至于安排多少个工人来做,工人们又是怎么编号的,那是GPU来决定的,咱不用管。
实际上,CUDA C编程要比这个比喻复杂得多。篇幅有限,我们就不再赘述。有兴趣的话可以参考NVIDIA的官网以及其它的CUDA编程教程。
4.2. 小波分解的并行思路
小波去噪的三过程:分解、阈值化和重构。由于分解和重构极其相似,我们只讨论分解就够了。
还记得我们之前讲过的小波分解的流程吧。
按照先后顺序,一个A要经过一次行卷积、一次下采样、一次列卷积再一次下采样得到下一层的 A/H/V/D.
直观上看,想要并行化处理,那就要在卷积上做文章(也似乎只有卷积可以做文章)。
卷积的本质是:将一张图的部分与滤镜对应相乘再作和,得到结果图中的一个像素点。所以回顾我们的工人比喻,我们可以将结果图中的像素点进行编号。这样一来,每一个线程的工作(搬砖工作)就是:把指定位置的原图部分和滤镜对上,对应位置相乘后全部加起来,用算式描述:
R ( x , y ) = Σ l e n ( f i l t e r ) ( S A i ∗ f i l t e r i ) R_{(x,y)} = \Sigma_{len(filter)} (S_{A_i} * filter_i) R(x,y)=Σlen(filter)(SAi∗filteri)
其中R表示卷积结果图,filter表示滤镜,len()表示取长度,S表示原图,i表示滤镜上的位置,A是某种映射函数。
现在我们已经直到卷积怎么并行化了。但还有一点值得说明:
行卷积之后是有行下采样的!也就是说,如果你第一次卷积的时候把所有行都做了卷积。哈哈,那你多浪费了一倍的时间;你做出来的结果有一半都是多余的,马上要被丢掉的。所以说,不论是行卷积还是列卷积,只要有选择性地做(隔着行/列)就可以了。
事实上,这个问题并不是并行化的问题。不论在何种架构里,这部分卷积过程都是多余的。不知道Matlab有没有发现这个事情呢?:B)
4.3. 阈值化的并行思路
最后一部分是阈值化的并行,这一部分的简单来自于阈值化这个函数的简单。(这句话里流露出作者对阈值化函数的蔑视,和他的孤傲心态)
在确定好了哪些部分的系数需要阈值化处理之后,把这些位置编上号丢给GPU去分配工作就好了。
5. 高斯白噪声与小波变换的关系及应用
这一章是补充更新的。时隔多月,如与前文文风不符,请见谅。
高斯白噪声是较常见的加性噪声,本章希望通过阐述该噪声在小波变换下的特性,导出一种可能的面向高斯白噪声的噪声阈值选取办法。
本章理论推导主要集中于一维信号,但不难推广至二维信号(图像)。在最后一节我们给出二维中的结论。
5.1. 独立同分布变量与高斯白噪声
对于若干随机变量,若他们的取值相互独立,并且服从同一分布,则称之为独立同分布(i.i.d.)变量。
高斯白噪声是一种采样点取值服从独立同分布的信号。独立意味着信号在某一时间点的取值与其它时间无关,这对应了“白”的性质9。同分布指同高斯分布,这种分布是自然界中最为常见的分布。
5.2. 高斯白噪声在小波变换中的性质
(一维)高斯白噪声经过小波变换后,在两个子信号中的能量一致,并与变换前的能量一致。这一点可以简单验证——白噪声频谱平坦,故高通滤波和低通滤波的结果能量一致。
利用正态随机变量线性组合的性质我们可以给出证明。
证明:假设某一小波变换的支撑长度为4(不失一般性),原信号S中的点记作 S i S_i Si,满足 S i S_i Si ~ ( 0 , σ 2 ) ( 0,\sigma^2) (0,σ2). 由概率论中正态随机变量线性组合的性质知道,变换后趋势子信号的任意一点的值为
![]()
在这里, α i \alpha_i αi是前面章节提到的滤波器的系数,满足 Σ α i 2 = 1 \Sigma \alpha_i^2=1 Σαi2=1的性质。
不难发现其同样满足 N ( 0 , σ 2 ) N ( 0,\sigma^2) N(0,σ2)的性质,同样地,可以证明波动子信号的分布也保持不变。
这与其它一般信号(包括语音、音乐、图片等)能量集中在低频不同,因此,可以通过小波变换把噪声在波动子信号(相对)独立地展现出来。
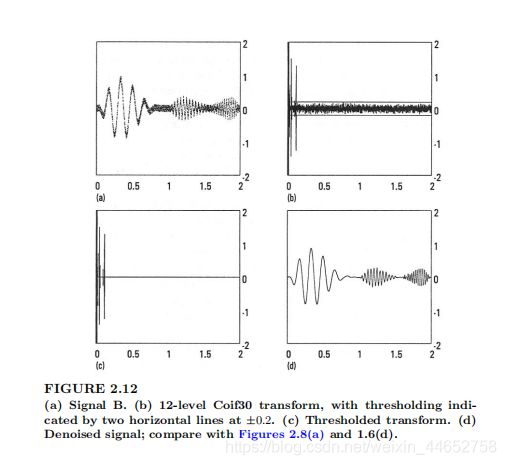
上面这张图(源自《A Primer on Wavelets and their Scientific Applications》)展示了一个带高斯白噪声信号经12层小波变换后的样子(b),可以看到噪声依然集中在整个区域内,但是原来信号中主要的内容已经集中到趋势子信号(前面讲的近似系数A,图片中左侧部分)。
因此可以对右侧的噪声进行估计,选取阈值。
5.3. 阈值选择
由于高斯白噪声经过变换还是高斯白噪声 (你大爷还是你大爷) ,而纯净信号的主要能量已经集中到近似系数里了。
所以,可以把阈值设置在高斯白噪声的 4 σ 4\sigma 4σ处。就概率而言,噪声振幅大于此处的部分占比仅为0.01%。
因此,对细节信号(对角细节/波动子信号)进行标准差计算,最后将阈值设为4个标准差左右即可。
当然,这么做显然不是十全十美的。因为纯净部分的信号经过变换也会有一部分出现在细节信号里,它们很容易被噪声淹没。这会带来两个问题:
一是这些细节可能将永远无法恢复,所以对含噪信号去噪,近似等于对原信号低通滤波;
二是这些细节影响标准差的计算。如果要避免影响的发生,则需要先验知识,例如——确信某一小部分细节信号的纯净部分很小至可以忽略时,只对这一部分细节信号进行标准差估计即可。正如“细节”这个描述一样,这样的区域可以选在原图/原信号中非常光滑、没有波动、没有什么细节的地方。
6. 结语
本文从通俗的角度介绍了图像小波去噪的实例,解析了三个函数,最后对这三个函数的并行化实现进行了简要分析。目的在于给非专业同学一些启发性的参考。
注脚
图像2k大小,需要6层分解 ↩︎
显卡厂商NVIDIA推出的运算平台 ↩︎
使用 NVIDIA GeForce GTX1080Ti ↩︎
这里原文把列打成了行,翻译后已修正。 ↩︎
“但我就是想知道”:在DL里,卷积是为了“抽取特征”;在这里,卷积是为了完成离散小波变换(DWT)的功能。 ↩︎
这里的“显卡”应为“GPU”;“GPU”不等于“显卡”,GPU是显卡的核心,显卡还包括显存等其它组件。 ↩︎
这里的线程号不同于操作系统里的线程号。CUDA的线程称为“硬件线程”。 ↩︎
(假定一次只能搬一块砖,并计作一件事) ↩︎
白的意思是频谱的振幅(在概率上)是恒定的,与有色噪声相对。 ↩︎