卡尔曼滤波及例程
1、五大公式
 预测状态
预测状态
![]() 预测协方差
预测协方差
![]() kalman增益
kalman增益
![]() 状态估计值
状态估计值
![]() 当前状态方差
当前状态方差
其中:
![]()
 为测量值,
为测量值, 为测量噪声,
为测量噪声,![]()
![]() :预测值 A:状态转移矩阵
:预测值 A:状态转移矩阵  :状态的控制量
:状态的控制量  :过程造噪声,假定其符合均值为0,协方差矩阵为Q的多元正太分布,
:过程造噪声,假定其符合均值为0,协方差矩阵为Q的多元正太分布,![]()
H:测量矩阵,从真实值到测量值的状态转移矩阵
2、python demo
# -*- coding=utf-8 -*-
# Kalman filter example demo in Python
# A Python implementation of the example given in pages 11-15 of "An
# Introduction to the Kalman Filter" by Greg Welch and Gary Bishop,
# University of North Carolina at Chapel Hill, Department of Computer
# Science, TR 95-041,
# http://www.cs.unc.edu/~welch/kalman/kalmanIntro.html
# by Andrew D. Straw
#coding:utf-8
import numpy
import pylab
#这里是假设A=1,H=1的情况
# intial parameters
n_iter = 50
sz = (n_iter,) # size of array
x = -0.37727 # truth value (typo in example at top of p. 13 calls this z)
z = numpy.random.normal(x,0.1,size=sz) # observations (normal about x, sigma=0.1)
Q = 1e-5 # process variance
# allocate space for arrays
xhat=numpy.zeros(sz) # a posteri estimate of x
P=numpy.zeros(sz) # a posteri error estimate
xhatminus=numpy.zeros(sz) # a priori estimate of x
Pminus=numpy.zeros(sz) # a priori error estimate
K=numpy.zeros(sz) # gain or blending factor
R = 0.1**2 # estimate of measurement variance, change to see effect
# intial guesses
xhat[0] = 0.0
P[0] = 1.0
for k in range(1,n_iter):
# time update
xhatminus[k] = xhat[k-1] #X(k|k-1) = AX(k-1|k-1) + BU(k) + W(k),A=1,BU(k) = 0
Pminus[k] = P[k-1]+Q #P(k|k-1) = AP(k-1|k-1)A' + Q(k) ,A=1
# measurement update
K[k] = Pminus[k]/( Pminus[k]+R ) #Kg(k)=P(k|k-1)H'/[HP(k|k-1)H' + R],H=1
xhat[k] = xhatminus[k]+K[k]*(z[k]-xhatminus[k]) #X(k|k) = X(k|k-1) + Kg(k)[Z(k) - HX(k|k-1)], H=1
P[k] = (1-K[k])*Pminus[k] #P(k|k) = (1 - Kg(k)H)P(k|k-1), H=1
pylab.figure()
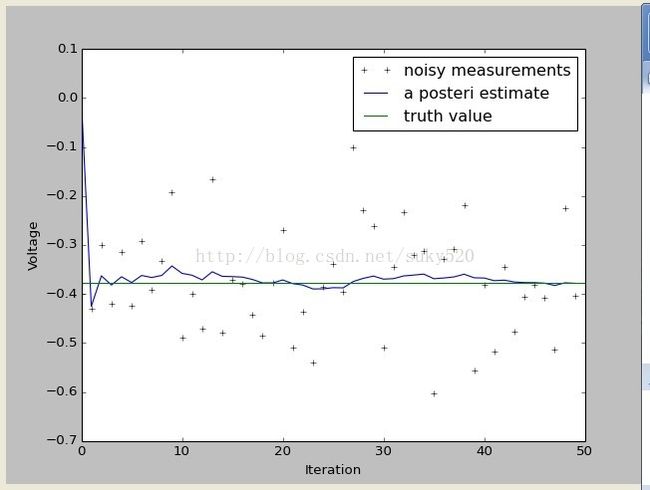
pylab.plot(z,'k+',label='noisy measurements') #测量值
pylab.plot(xhat,'b-',label='a posteri estimate') #过滤后的值
pylab.axhline(x,color='g',label='truth value') #系统值
pylab.legend()
pylab.xlabel('Iteration')
pylab.ylabel('Voltage')
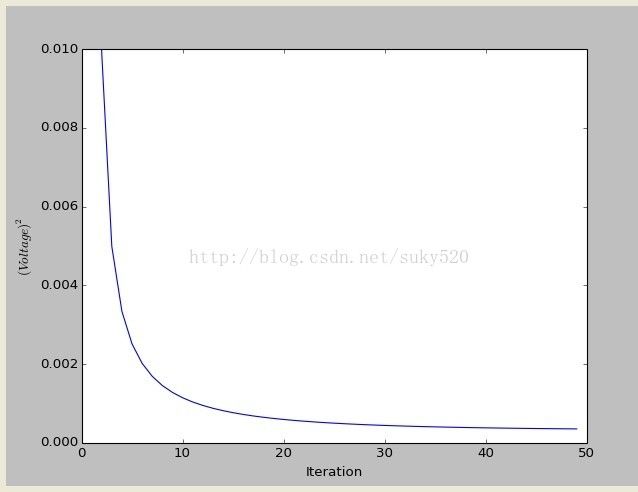
pylab.figure()
valid_iter = range(1,n_iter) # Pminus not valid at step 0
pylab.plot(valid_iter,Pminus[valid_iter],label='a priori error estimate')
pylab.xlabel('Iteration')
pylab.ylabel('$(Voltage)^2$')
pylab.setp(pylab.gca(),'ylim',[0,.01])
pylab.show()
3、鼠标跟踪
#include
#include
#include
using namespace Ros_node;
using namespace cv;
using namespace std;
const int winWidth = 800;
const int winHeight = 600;
Point mousePosition = Point(winWidth>>1, winHeight>>1);
//mouse call back
void mouseEvent(int event, int x, int y, int flags, void *param)
{
if(event==CV_EVENT_MOUSEMOVE)
{
mousePosition=Point(x,y);
}
}
int main(int argc, char **argv)
{
ros::init(argc, argv, "ros_node_node");
//1.kalman filter setup
const int stateNum=4;
const int measureNum=2;
KalmanFilter KF(stateNum, measureNum, 0);
Mat state (stateNum, 1, CV_32FC1); //state(x,y,detaX,detaY)
Mat processNoise(stateNum, 1, CV_32F);
Mat measurement = Mat::zeros(measureNum, 1, CV_32F); //measurement(x,y)
randn( state, Scalar::all(0), Scalar::all(0.1) ); //随机生成一个矩阵,期望是0,标准差为0.1;
KF.transitionMatrix = *(Mat_(4, 4) <<
1,0,1,0,
0,1,0,1,
0,0,1,0,
0,0,0,1 );//元素导入矩阵,按行;
//setIdentity: 缩放的单位对角矩阵;
//!< measurement matrix (H) 观测模型
setIdentity(KF.measurementMatrix);
//!< process noise covariance matrix (Q)
// wk 是过程噪声,并假定其符合均值为零,协方差矩阵为Qk(Q)的多元正态分布;
setIdentity(KF.processNoiseCov, Scalar::all(1e-5));
//!< measurement noise covariance matrix (R)
//vk 是观测噪声,其均值为零,协方差矩阵为Rk,且服从正态分布;
setIdentity(KF.measurementNoiseCov, Scalar::all(1e-1));
//!< priori error estimate covariance matrix (P'(k)): P'(k)=A*P(k-1)*At + Q)*/ A代表F: transitionMatrix
//预测估计协方差矩阵;
setIdentity(KF.errorCovPost, Scalar::all(1));
//!< corrected state (x(k)): x(k)=x'(k)+K(k)*(z(k)-H*x'(k))
//initialize post state of kalman filter at random
randn(KF.statePost, Scalar::all(0), Scalar::all(0.1));
Mat showImg(winWidth, winHeight,CV_8UC3);
for(;;)
{
setMouseCallback("Kalman", mouseEvent);
showImg.setTo(0);
Point statePt = Point( (int)KF.statePost.at(0), (int)KF.statePost.at(1));
//2.kalman prediction
Mat prediction = KF.predict();
Point predictPt = Point( (int)prediction.at(0), (int)prediction.at(1));
//3.update measurement
measurement.at(0)= (float)mousePosition.x;
measurement.at(1) = (float)mousePosition.y;
//4.update
KF.correct(measurement);
// randn( processNoise, Scalar(0), Scalar::all(sqrt(KF.processNoiseCov.at(0, 0))));
// state = KF.transitionMatrix*state + processNoise;
//draw
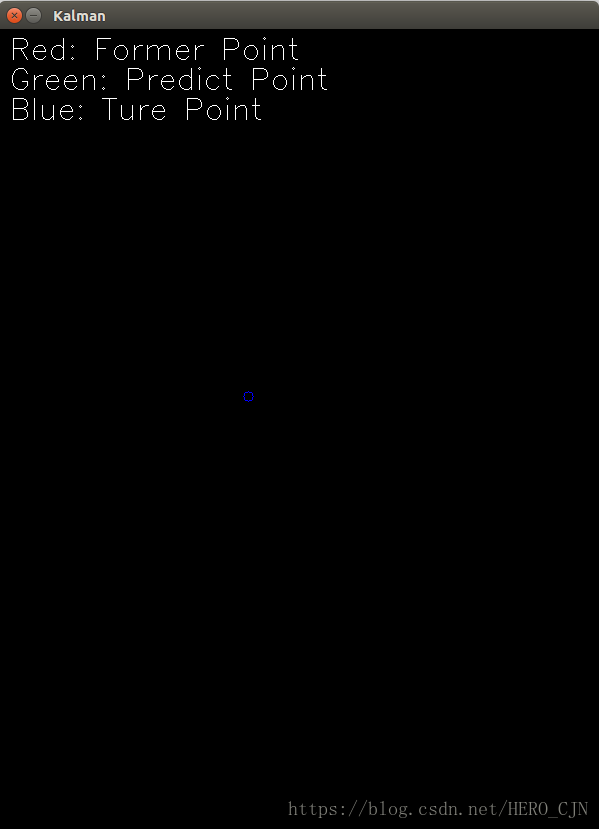
circle(showImg, statePt, 5, CV_RGB(255,0,0),1);//former point
circle(showImg, predictPt, 5, CV_RGB(0,255,0),1);//predict point
circle(showImg, mousePosition, 5, CV_RGB(0,0,255),1);//ture point
// CvFont font;//字体
// cvInitFont(&font, CV_FONT_HERSHEY_SCRIPT_COMPLEX, 0.5f, 0.5f, 0, 1, 8);
putText(showImg, "Red: Former Point", cvPoint(10,30), FONT_HERSHEY_SIMPLEX, 1 ,Scalar :: all(255));
putText(showImg, "Green: Predict Point", cvPoint(10,60), FONT_HERSHEY_SIMPLEX, 1 ,Scalar :: all(255));
putText(showImg, "Blue: Ture Point", cvPoint(10,90), FONT_HERSHEY_SIMPLEX, 1 ,Scalar :: all(255));
imshow( "Kalman", showImg );
int key = waitKey(3);
if (key == 27)
{
break;
}
}
} 代码结果显示:
资料:
维基百科 卡尔曼滤波
论文
卡尔曼滤波应用及其matlab实现