图论几大重点算法
最小生成树算法
1、普利姆算法
“走一步看一步,逐步生成最小生成树”
#include测试样例1输出:37
测试样例2输出:99
2、布鲁斯卡尔算法
“全局意识,从图中最短权值的边入手”
#include运行结果同上,同样为最小生成树算法,只是方法不同。
最短路径算法
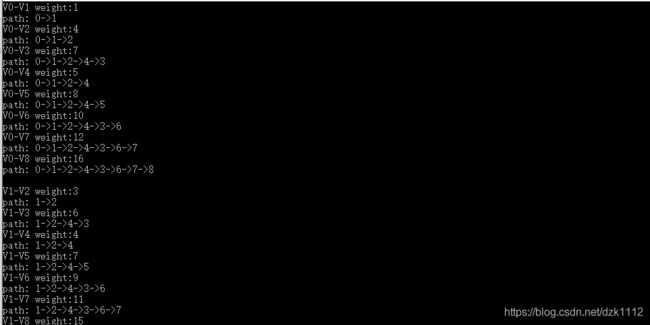
1、迪杰斯特拉算法
“强调单源顶点查找路径的方式”
#include样例输出:
![]()
2、佛洛依德算法
“巧妙利用矩阵变换”
#include
for(v=0;v<num;v++){
for(w=v+1;w<num;w++){
printf("\nV%d-V%d weight:%d\n",v,w,dis[v][w]);
k=path[v][w];
printf("path: %d",v);
while(k!=w){
printf("->%d",k);
k=path[k][w];
}
printf("->%d",w);
}
printf("\n");
}
有向无环图的应用
1、拓扑排序
可以判断一个有向图是否存在环
#include "stdio.h"
#include "stdlib.h"
#include "io.h"
#include "math.h"
#include "time.h"
#define OK 1
#define ERROR 0
#define TRUE 1
#define FALSE 0
#define MAXEDGE 20
#define MAXVEX 14
#define INFINITY 65535
typedef int Status; /* Status是函数的类型,其值是函数结果状态代码,如OK等 */
/* 邻接矩阵结构 */
typedef struct
{
int vexs[MAXVEX];
int arc[MAXVEX][MAXVEX];
int numVertexes, numEdges;
}MGraph;
/* 邻接表结构****************** */
typedef struct EdgeNode /* 边表结点 */
{
int adjvex; /* 邻接点域,存储该顶点对应的下标 */
int weight; /* 用于存储权值,对于非网图可以不需要 */
struct EdgeNode *next; /* 链域,指向下一个邻接点 */
}EdgeNode;
typedef struct VertexNode /* 顶点表结点 */
{
int in; /* 顶点入度 */
int data; /* 顶点域,存储顶点信息 */
EdgeNode *firstedge;/* 边表头指针 */
}VertexNode, AdjList[MAXVEX];
typedef struct
{
AdjList adjList;
int numVertexes,numEdges; /* 图中当前顶点数和边数 */
}graphAdjList,*GraphAdjList;
/* **************************** */
void CreateMGraph(MGraph *G)/* 构件图 */
{
int i, j;
/* printf("请输入边数和顶点数:"); */
G->numEdges=MAXEDGE;
G->numVertexes=MAXVEX;
for (i = 0; i < G->numVertexes; i++)/* 初始化图 */
{
G->vexs[i]=i;
}
for (i = 0; i < G->numVertexes; i++)/* 初始化图 */
{
for ( j = 0; j < G->numVertexes; j++)
{
G->arc[i][j]=0;
}
}
G->arc[0][4]=1;
G->arc[0][5]=1;
G->arc[0][11]=1;
G->arc[1][2]=1;
G->arc[1][4]=1;
G->arc[1][8]=1;
G->arc[2][5]=1;
G->arc[2][6]=1;
G->arc[2][9]=1;
G->arc[3][2]=1;
G->arc[3][13]=1;
G->arc[4][7]=1;
G->arc[5][8]=1;
G->arc[5][12]=1;
G->arc[6][5]=1;
G->arc[8][7]=1;
G->arc[9][10]=1;
G->arc[9][11]=1;
G->arc[10][13]=1;
G->arc[12][9]=1;
}
/* 利用邻接矩阵构建邻接表 */
void CreateALGraph(MGraph G,GraphAdjList *GL)
{
int i,j;
EdgeNode *e;
*GL = (GraphAdjList)malloc(sizeof(graphAdjList));
(*GL)->numVertexes=G.numVertexes;
(*GL)->numEdges=G.numEdges;
for(i= 0;i <G.numVertexes;i++) /* 读入顶点信息,建立顶点表 */
{
(*GL)->adjList[i].in=0;
(*GL)->adjList[i].data=G.vexs[i];
(*GL)->adjList[i].firstedge=NULL; /* 将边表置为空表 */
}
for(i=0;i<G.numVertexes;i++) /* 建立边表 */
{
for(j=0;j<G.numVertexes;j++)
{
if (G.arc[i][j]==1)
{
e=(EdgeNode *)malloc(sizeof(EdgeNode));
e->adjvex=j; /* 邻接序号为j */
e->next=(*GL)->adjList[i].firstedge; /* 将当前顶点上的指向的结点指针赋值给e */
(*GL)->adjList[i].firstedge=e; /* 将当前顶点的指针指向e */
(*GL)->adjList[j].in++;
}
}
}
}
/* 拓扑排序,若GL无回路,则输出拓扑排序序列并返回1,若有回路返回0。 */
Status TopologicalSort(GraphAdjList GL)
{
EdgeNode *e;
int i,k,gettop;
int top=0; /* 用于栈指针下标 */
int count=0;/* 用于统计输出顶点的个数 */
int *stack; /* 建栈将入度为0的顶点入栈 */
stack=(int *)malloc(GL->numVertexes * sizeof(int) );
for(i = 0; i<GL->numVertexes; i++)
if(0 == GL->adjList[i].in) /* 将入度为0的顶点入栈 */
stack[++top]=i;
while(top!=0)
{
gettop=stack[top--];
printf("%d -> ",GL->adjList[gettop].data);
count++; /* 输出i号顶点,并计数 */
for(e = GL->adjList[gettop].firstedge; e; e = e->next)
{
k=e->adjvex;
if( !(--GL->adjList[k].in) ) /* 将i号顶点的邻接点的入度减1,如果减1后为0,则入栈 */
stack[++top]=k;
}
}
printf("\n");
if(count < GL->numVertexes)
return ERROR;
else
return OK;
}
int main(void)
{
MGraph G;
GraphAdjList GL;
int result;
CreateMGraph(&G);
CreateALGraph(G,&GL);
result=TopologicalSort(GL);
printf("result:%d",result);
return 0;
}
2、关键路径算法
注:本文的所有算法借鉴《大话数据结构》