小梅哥实战指南复习笔记第3章:FPGA基本数字逻辑设计
文章目录
- 3.4 BCD计数器
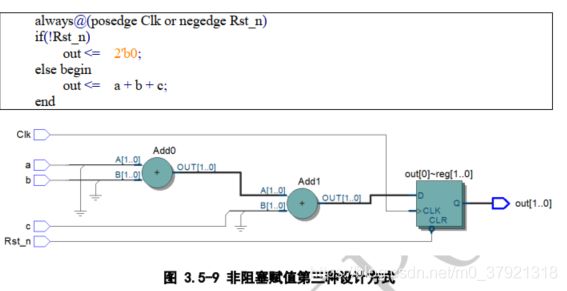
- 3.5 阻塞/非阻塞赋值
- 3.7 按键消抖
- 3.8 加减法计数器
- 3.9 8位7段数码管HEX显示驱动
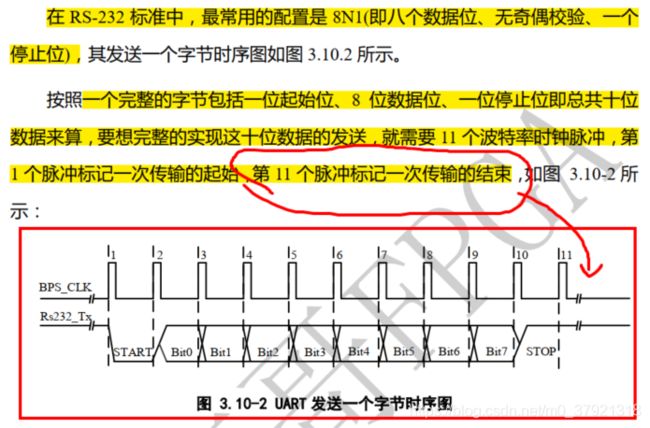
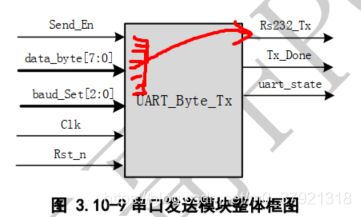
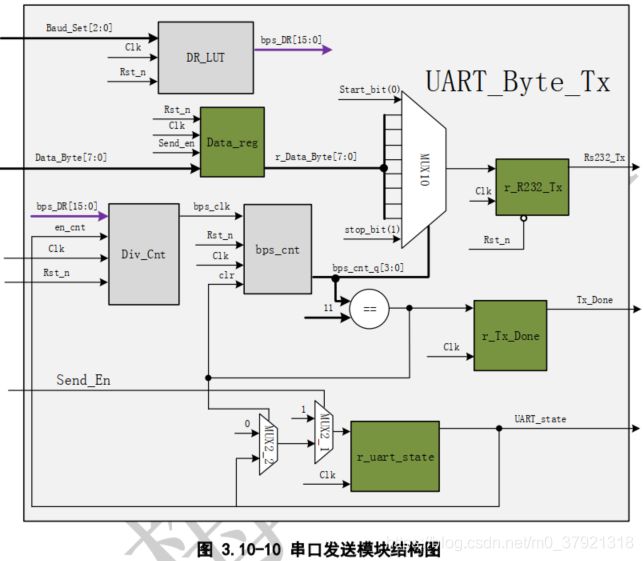
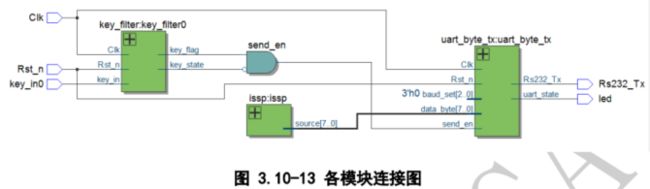
- 3.10.1 串口发送UART_TX
- 3.10.2 串口接收UART_RX
3.4 BCD计数器

/******************************p142 3.4.2 级联BCD码计数器********************************/
module BCDcnt(clk,rst_n,cin,cout,cnt);
input clk,rst_n,cin;
output reg cout;
output reg [3:0] cnt;
wire end_cnt,add_cnt;
always @(posedge clk or negedge rst_n)begin
if(!rst_n) cnt <= 0;
else if(add_cnt)begin
if(end_cnt)
cnt <= 0;
else
cnt <= cnt + 1;
end
end
assign add_cnt = cin == 1'b1;//相当于下一级计数器的使能信号
assign end_cnt = cnt == 4'd9;
always@(posedge clk or negedge rst_n)begin
if(!rst_n) cout <= 1'b0;
else if(add_cnt && end_cnt) cout <= 1'b1;//这里cout<=1的条件可以只是end_cnt吗??
else cout <= 1'b0;
end
endmodule

/******************************p144 3.4 BCDcnt3_top********************************/
`include BCDcnt.v
module BCDcnt3_top(cin,clk,rst_n,cout,q);
input rst_n,clk,cin;
output [12:0] q;
wire cout0,cout1;
wire [3:0] cnt0,cnt1,cnt2;
assign q={cout,cnt2,cnt1,cnt0};
BCDcnt u0(.clk(clk),.rst_n(rst_n),.cin(cin), .cout(cout0),.cnt(cnt0));
BCDcnt u1(.clk(clk),.rst_n(rst_n),.cin(cout0),.cout(cout1),.cnt(cnt1));
BCDcnt u2(.clk(clk),.rst_n(rst_n),.cin(cout1),.cout(cout), .cnt(cnt2));
endmodule
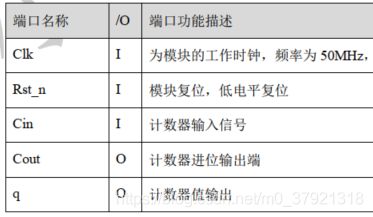
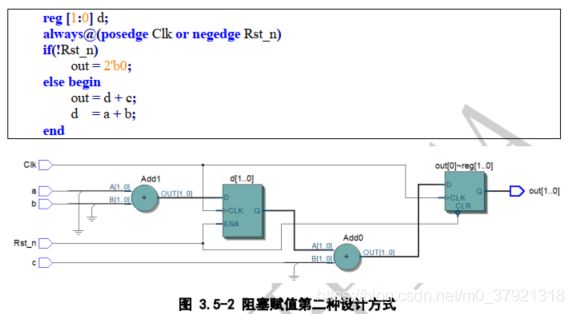
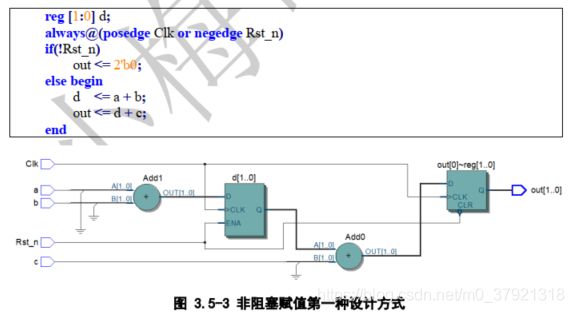
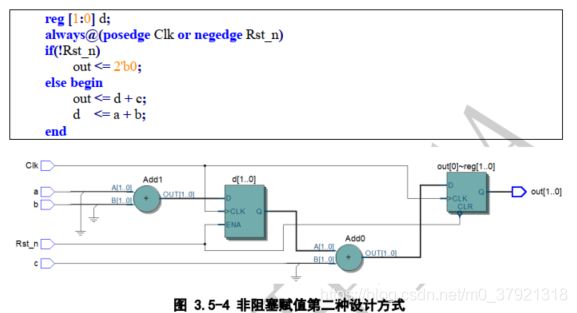
3.5 阻塞/非阻塞赋值

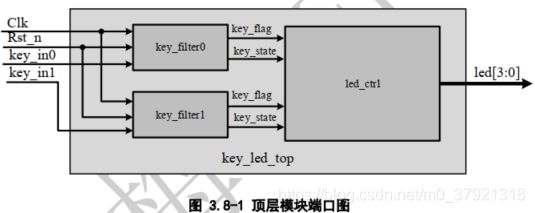
3.7 按键消抖
之前写的一篇按键消抖的博文
https://blog.csdn.net/m0_37921318/article/details/105890194
复盘了部分代码
/******************************p163 3.17 独立按键消抖模块设计及验证********************************/
module key_filter(key_in,clk,rst_n,key_flag,key_state);
input key_in,clk,rst_n;
output reg key_state;
output reg key_flag;
reg [19:0] cnt;
wire end_cnt,en_cnt;
//20ms计数器
always@(posedge clk or negedge rst_n)begin
if(!rst_n) begin
cnt <= 0;
end
else if(en_cnt)begin
if(end_cnt)
cnt <= 20'd0;
else
cnt <= cnt+1;
end
end
//递增使能信号应该是 状态(FILTER0/FILTER1)
assign end_cnt= cnt==20'd999_000;
reg key_sync_a,key_sync_b;
//输入信号同步化
always@(posedge clk or negedge rst_n)begin
if(!rst_n) begin
key_sync_a <= 0;
key_sync_b <= 0;
end
else begin
key_sync_a <= key_in;
key_sync_b <= key_sync_a;
end
end
reg key_edge_a,key_edge_b;
//边沿检测
always@(posedge clk or negedge rst_n)begin
if(!rst_n) begin
key_edge_a <= 0;
key_edge_b <= 0;
end
else begin
key_edge_a <= key_sync_b;
key_edge_b <= key_edge_a;
end
end
assign pedge = key_edge_a & !key_edge_b;
assign nedge =!key_edge_a & key_edge_b;
reg [3:0] state_c,state_n;
//主状态机UP-FILTER0-DOWN-FILTER1
//状态转移
always@(posedge clk or negedge rst_n)begin
if(!rst_n) state_c <= UP;
else state_c <= state_n;
end
//组合逻辑
always@(*)begin
case(state_c)
UP: state_n =(nedge)?FILTER0:state_n;
FILTER0: state_n = end_cnt ? DOWN:(pedge ? UP:state_n);
DOWN: state_n =(pedge)?FILTER1:state_n;
FILTER1: state_n = end_cnt ? UP:(nedge ? DOWN:state_n);
default: state_n = UP;
endcase
end
//输出时序
reg en_cnt;
always@(posedge clk or negedge rst_n)begin
if(!rst_n)begin
en_cnt <=0;
key_flag <=0;
key_state <=0;
end
else begin
case(state_c)
UP: begin
en_cnt<=(nedge)?1:en_cnt;
end
FILTER0:begin
key_flag<=end_cnt ? 1:key_flag;
key_state<=end_cnt ? 0:key_state;
en_cnt<=0;
end
DOWN: begin
en_cnt<=(pedge)?1:en_cnt;
end
FILTER1:begin
key_flag<=end_cnt ? 1:key_flag;
key_state<=end_cnt ? 1:key_state;
en_cnt<=0;
end
default:begin
en_cnt <=0;
key_flag <=0;
key_state <=0;
end
endcase
end
end
assign key_state=state_c;
endmodule
3.8 加减法计数器
按下0键+1,按下1键-1
控制模块如下:
需要注意的是:按键按下的表示是
key_flag && !key_state ==1
即按键有按下/释放动作 && 按键状态为DOWN按下
(key_state==1为弹起来的UP,==0为按下去的DOWN)
因此需要将key_flag和key_state为1的时序进行对齐,如果没对齐需要加触发器使其对齐。
同理,按键释放的表示是
key_flag && key_state ==1

module key_ctrl(key_flag_add,key_flag_minus,key_state_add,key_state_minus,clk,rst_n,num);
input 。。。
output reg [4:0] num;
always@(posedge clk or negedge rst_n)begin
if(!rst_n)
num<=0;
else if(key_flag_add && !key_state_add)
num<=num+1;
else if(key_flag_minus && !key_state_minus)
num<=num-1;
else
num<=num;
end
3.9 8位7段数码管HEX显示驱动

/******************************p185 3.9 4位7段数码管循环点亮驱动设计********************************/
module hex4(data,clk,rst_n);
input clk,rst_n;
input [15:0] data;//4个BCD码输入数字
output reg [3:0] sel; //4数码管数选信号输出
output reg [6:0] seg; //1数码管上的点亮的灯条信号选择输出
reg [14:0] cnt;
always @(posedge clk or negedge rst_n)begin
if(!rst_n) cnt <= 0;
else if(add_cnt)begin
if(end_cnt)
cnt <= 0;
else
cnt <= cnt + 1;
end
end
assign add_cnt = 1;
assign end_cnt = cnt == 15'd24_999;
//1kHz的时钟
reg clk_1k;
always @(posedge clk or negedge rst_n)begin
if(!rst_n) clk_1k <= 0;
else if(end_cnt) clk_1k=~clk_1k;
else clk_1k=clk_1k;
end
end
always @(posedge clk_1k or negedge rst_n)begin
if(!rst_n) sel<=4'b0000;
else if(sel==4'b1000) sel<=4'b0001;
else sel<=sel<<1;
end
reg [3:0] disp_data;
always @(posedge clk_1k or negedge rst_n)begin
if(!rst_n) disp_data<=4'b0000;
else
case(sel)
4'b0001:disp_data<=data[3:0];
4'b0010:disp_data<=data[7:4];
4'b0100:disp_data<=data[11:8];
4'b1000:disp_data<=data[15:12];
default:disp_data<=4'b0000
endcase
end
reg [3:0] disp_data;
always @(posedge clk_1k or negedge rst_n)begin
if(!rst_n) seg<=7'b;
else
case(disp_data)
4'd1: seg<=7'b ;
4'd2: seg<=7'b ;
4'd3: seg<=7'b ;
4'd4: seg<=7'b ;
4'd9: seg<=7'b ;
default:seg<=7'bz;
endcase
end
endmodule
HC595驱动模块不再写了,挺绕的

3.10.1 串口发送UART_TX
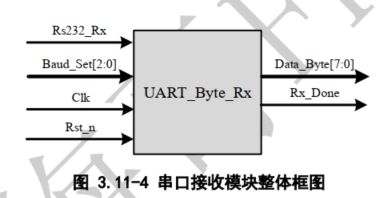
3.10.2 串口接收UART_RX
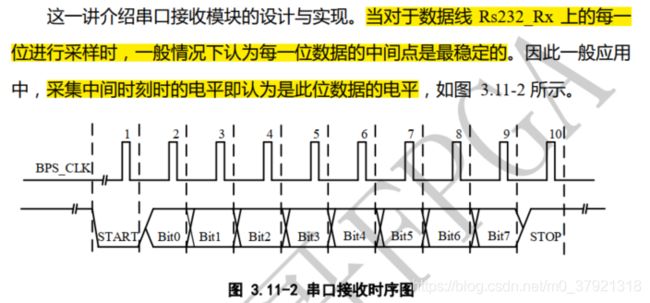
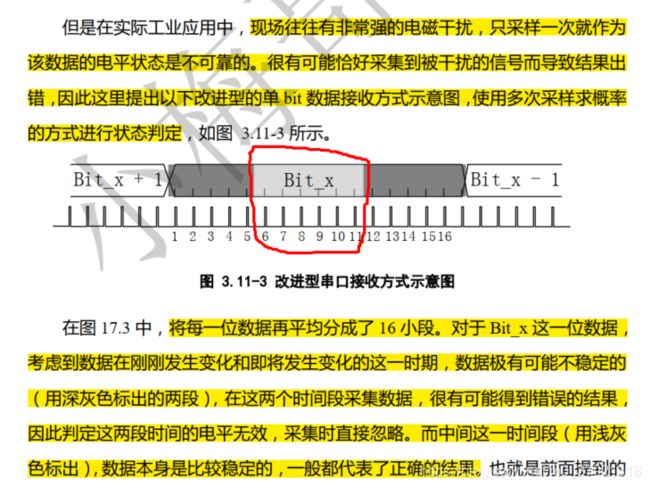
思路:设置波特率时钟,将波特率max计数值除以16,为一个bps_clk,并在检测到下降沿时,开始对bps_clk进行计数 得到bps_cnt,范围在0-159(16*10[START_BIT+8个串行数据bit+STOP_BIT]);则定义寄存器数组深度为8,宽度为3(8个3bit寄存器,最高位标志着该bit的真实值);第一个bit的0-15范围内的6,7,8,9,10,11计数值进行累加放在寄存器1中,间隔16个的累加值放在寄存器2中,以此类推。并在bps_cnt==16’d159时输出这8个3bit寄存器的最高位r_data_byte[x]【2】,(x为0~7),即输出data_byte[7:0] 。