Ubuntu+ROS安装及rosdep init失败解决办法
1.安装Ubuntu16.04/18.04
(1)双系统硬盘安装:参考https://blog.csdn.net/weixin_42026571/article/details/94380392
Ubuntu 18.04 :链接:https://pan.baidu.com/s/1onmDAkovlZsHGFm9Kmr6ww
提取码:i0nu
Ubuntu 16.04:链接:https://pan.baidu.com/s/1lLs8ALeNuIKNgPYuaBXAyA
提取码:57nq
(2)虚拟机安装:
1) 下载VMware:
链接:https://pan.baidu.com/s/1lhEdfcBmT04HzIYFmUiMzA
提取码:0681
2) 安装VMware
均默认安装(可自定义安装盘的位置),选择许可证安装,并将keys.txt文件的任意许可证密钥输入直至完成安装。
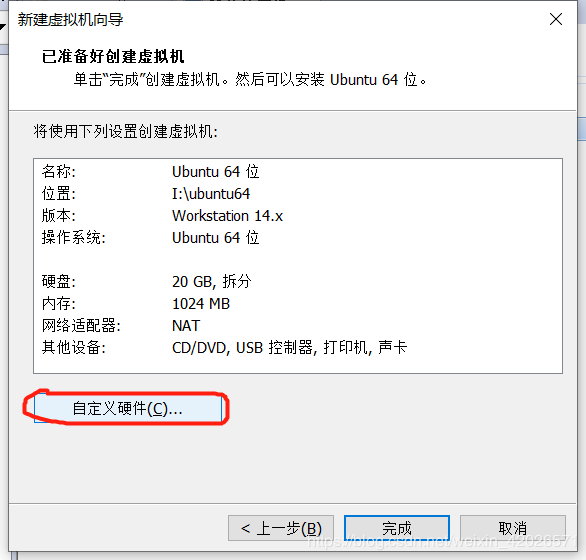
3) 安装Ubuntu(以16.04为例) 打开VMware —— 点击创建新的虚拟机——

自定义安装位置
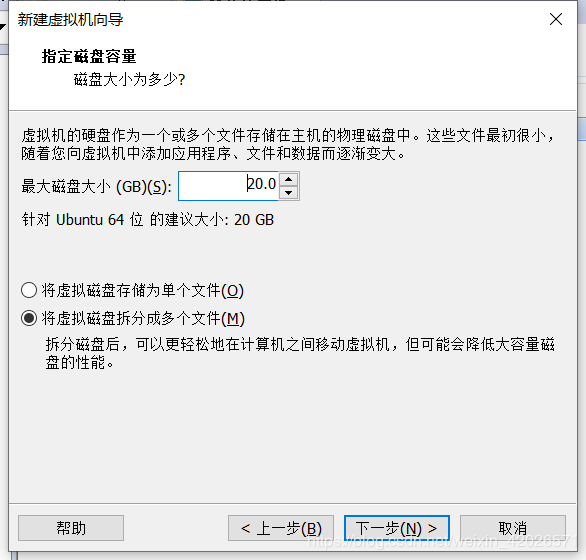
根据自己需求设置磁盘大小
点击自定义硬件安装
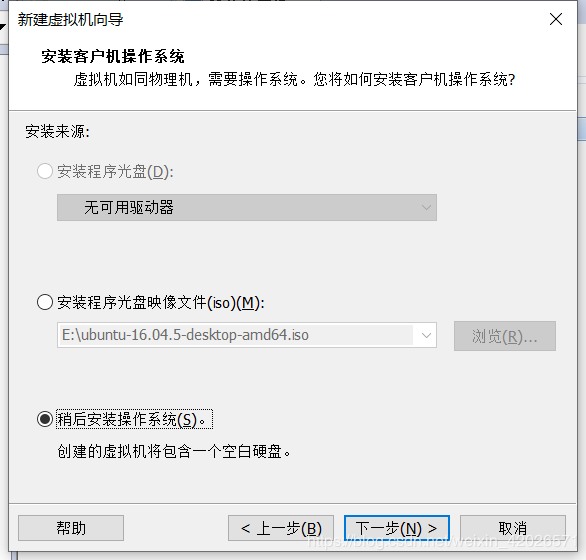
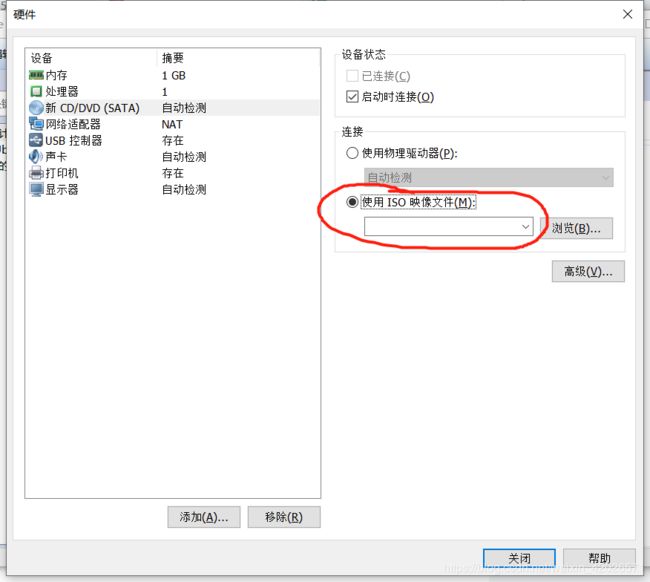
选择下载好的Ubuntu镜像文件
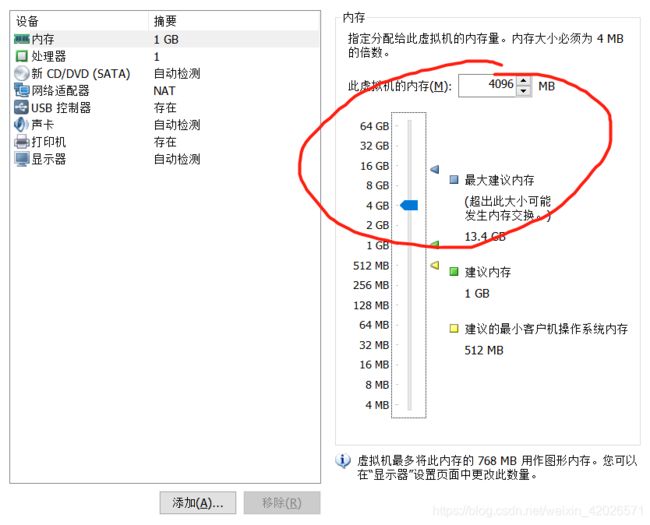
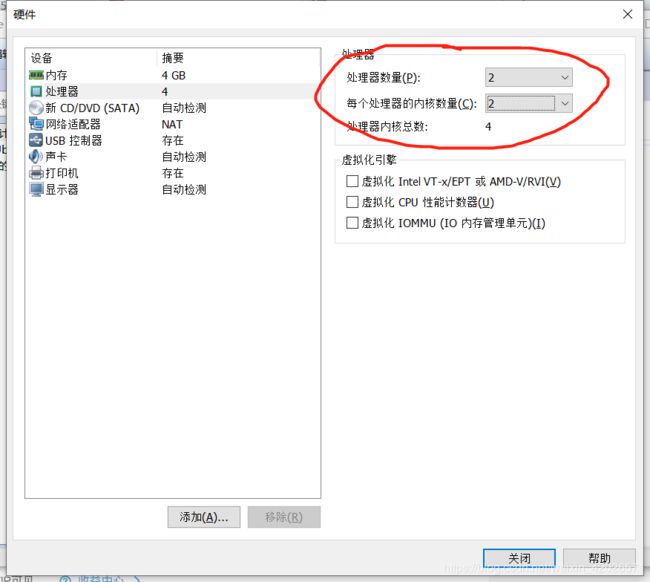
根据需求分配虚拟机内存和处理器,网络适配器默认,若安装完成后无法连接无线网,可选择桥接模式
点击开启虚拟机
选择语言中文简体——点击安装Ubuntu——选择正常安装——选择清除整个磁盘并安装Ubuntu——点击继续(将改动写入磁盘吗?)——点击继续(您在什么地方)——点击继续(创建用户账号)——直至安装成功
4)安装VMware Tools:
安装完成后,虚拟机内运行的Ubuntu不能全屏运行,需安装VMware Tools
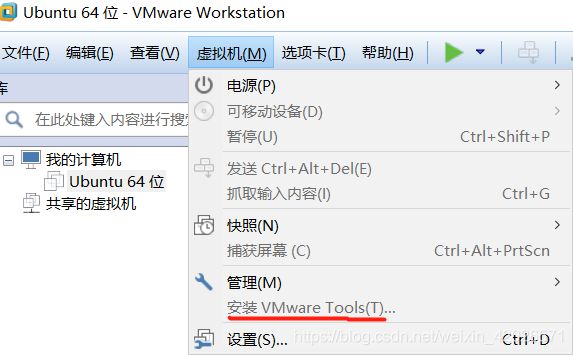
点击下图,则Ubuntu桌面自动生成一个压缩包
右键压缩包——提取到此处——进入解压后的vnware-tools-distrib目录,并在此目录打开终端(或打开终端cd 进入此目录)
运行脚本文件:
sudo ./vmware-install.pl 输入yes确定安装,之后默认选项完成安装。
若不能自动全屏运行 则按 Ctrl+Alt+Enter
2.安装ROS

由于不同版本的ROS匹配不同版本的Ubuntu系统,Kinetic匹配Ubuntu16.04 Melodic 匹配 Ubuntu18.04 ,可根据自己的需求选择要安装的ROS和Ubuntu的版本。
下面以虚拟机(Ubuntu 16.04)安装ROS为例:
(1) 修改软件源:

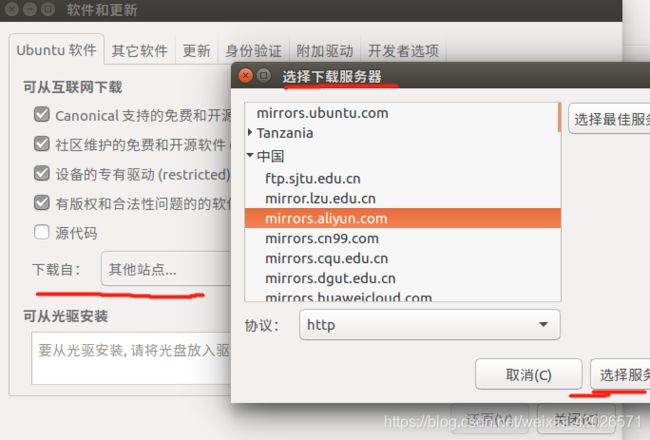
可以选择阿里云等服务器
(2) 安装步骤
1)添加ROS软件源
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'也可以使用中科大软件源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'2)添加密钥
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C6543)安装ROS(kinetic)
sudo apt-get update
sudo apt-get install ros-kinetic-desktop-full若要安装melodic版本则运行
sudo apt-get install ros-melodic-desktop-full4)初始化rosdep
sudo rosdep init
rosdep update初始化rosdep这步最易出现问题。运行sudo rosdep init后错误提示
ERROR:cannot download default sources list from:
https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/sources.list.d/20-default.list
Website may be down发现提示的是某网站打不开,这步可尝试链接手机热点进行,或者科学XX,若不行,则可能是raw.githubusercontent.com的问题,解决办法是修改hosts文件,添加这个网站的ip地址。
# 1 打开hosts文件
sudo gedit /etc/hosts
# 2 在文件末尾添加 并保存
151.101.84.133 raw.githubusercontent.com
# 3 重复初始化步骤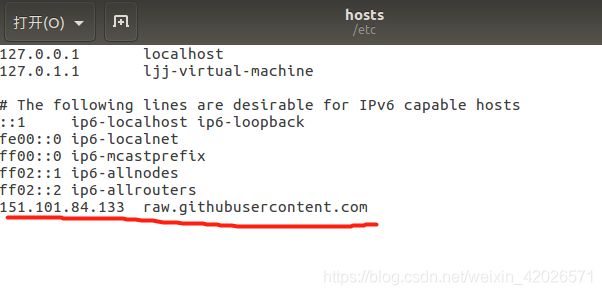
(若编辑hosts 保存后出现如图警告可忽视,这是gedit编辑的问题)

其他关于初始化rosdep失败的解决方法可参考如下博客:
https://blog.csdn.net/JanKin_BY/article/details/105509383
https://blog.csdn.net/qq_25368751/article/details/104248464
5)设置环境变量
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc若安装的版本为melodic,只需将kinetic替换成melodic
6) 安装rosinstall
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential3利用海龟仿真器测试:
(1)启动ROS Master:打开一个终端 输入
roscore

(2)启动海龟仿真器:再打开一个终端 输入
rosrun turtlesim turtlesim_node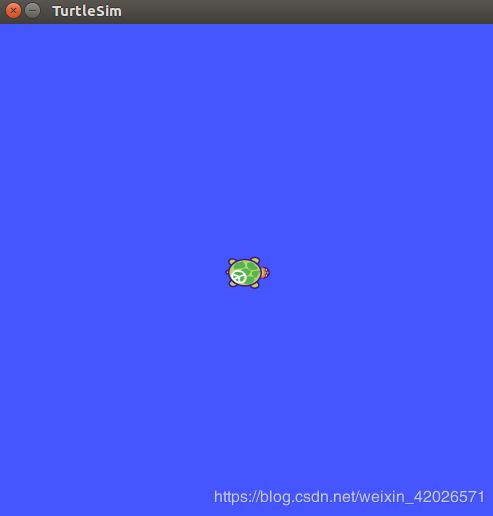
(3)启动海龟控制节点:打开第三个终端 输入
rosrun turtlesim turtle_teleop_key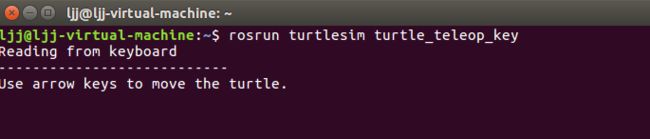
则可利用键盘控制海龟的运动
