Opencv相机标定与3D重构---利用Opencv进行相机标定
理论
- 对于失真,OpenCV考虑了径向和切向因子。 对于径向因子,使用以下公式:

- 因此,对于(x,y)坐标处的未失真像素点,其在失真图像上的位置将是(x distorted y distorted)。 径向变形的存在表现为“桶状”或“鱼眼”效应。
- 由于摄像镜头与成像平面不完全平行,因此发生切向畸变。 它可以通过公式表示:

- 所以我们有五个失真参数,在OpenCV中呈现为一行矩阵,有5列:

- 现在,对于单位转换,我们使用以下公式:

- 这里通过使用单应性坐标系(和w = Z)来解释w的存在。 未知参数是fx和fy(相机焦距)和(cx,cy),它们是以像素坐标表示的光学中心。 如果对于两个轴,使用具有给定纵横比(通常为1)的共同焦距,则fy = fx * a,并且在上部公式中,我们将具有单个焦距f。 包含这四个参数的矩阵称为相机矩阵。 虽然无论使用何种相机分辨率,失真系数都是相同的,但应根据校准分辨率的当前分辨率进行缩放。
- 确定这两个矩阵的过程是校准。 通过基本几何方程计算这些参数。 使用的等式取决于所选择的校准对象。 目前,OpenCV支持三种类型的校准对象:
- 古典黑白棋盘
- 对称的圆圈图案
- 不对称的圆圈图案
- 基本上,您需要使用相机拍摄这些图案的快照,然后让OpenCV找到它们。 每个找到的模式都会产生一个新的等式。 要求解方程,您需要至少预定数量的模式快照,以形成一个良好的方程系统。 棋盘图案的数字较高,而圆形图案的数字较少。 例如,理论上棋盘图案需要至少两个快照。 然而,在实践中,我们的输入图像中存在大量噪声,因此为了获得良好的结果,您可能需要在不同位置至少10个输入模式的良好快照。
代码
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
using namespace cv;
using namespace std;
static void help()
{
cout << "This is a camera calibration sample." << endl
<< "Usage: camera_calibration [configuration_file -- default ./default.xml]" << endl
<< "Near the sample file you'll find the configuration file, which has detailed help of "
"how to edit it. It may be any OpenCV supported file format XML/YAML." << endl;
}
class Settings
{
public:
Settings() : goodInput(false) {}
enum Pattern { NOT_EXISTING, CHESSBOARD, CIRCLES_GRID, ASYMMETRIC_CIRCLES_GRID };
enum InputType { INVALID, CAMERA, VIDEO_FILE, IMAGE_LIST };
void write(FileStorage& fs) const //Write serialization for this class
{
fs << "{"
<< "BoardSize_Width" << boardSize.width
<< "BoardSize_Height" << boardSize.height
<< "Square_Size" << squareSize
<< "Calibrate_Pattern" << patternToUse
<< "Calibrate_NrOfFrameToUse" << nrFrames
<< "Calibrate_FixAspectRatio" << aspectRatio
<< "Calibrate_AssumeZeroTangentialDistortion" << calibZeroTangentDist
<< "Calibrate_FixPrincipalPointAtTheCenter" << calibFixPrincipalPoint
<< "Write_DetectedFeaturePoints" << writePoints
<< "Write_extrinsicParameters" << writeExtrinsics
<< "Write_outputFileName" << outputFileName
<< "Show_UndistortedImage" << showUndistorsed
<< "Input_FlipAroundHorizontalAxis" << flipVertical
<< "Input_Delay" << delay
<< "Input" << input
<< "}";
}
void read(const FileNode& node) //Read serialization for this class
{
node["BoardSize_Width" ] >> boardSize.width;
node["BoardSize_Height"] >> boardSize.height;
node["Calibrate_Pattern"] >> patternToUse;
node["Square_Size"] >> squareSize;
node["Calibrate_NrOfFrameToUse"] >> nrFrames;
node["Calibrate_FixAspectRatio"] >> aspectRatio;
node["Write_DetectedFeaturePoints"] >> writePoints;
node["Write_extrinsicParameters"] >> writeExtrinsics;
node["Write_outputFileName"] >> outputFileName;
node["Calibrate_AssumeZeroTangentialDistortion"] >> calibZeroTangentDist;
node["Calibrate_FixPrincipalPointAtTheCenter"] >> calibFixPrincipalPoint;
node["Calibrate_UseFisheyeModel"] >> useFisheye;
node["Input_FlipAroundHorizontalAxis"] >> flipVertical;
node["Show_UndistortedImage"] >> showUndistorsed;
node["Input"] >> input;
node["Input_Delay"] >> delay;
node["Fix_K1"] >> fixK1;
node["Fix_K2"] >> fixK2;
node["Fix_K3"] >> fixK3;
node["Fix_K4"] >> fixK4;
node["Fix_K5"] >> fixK5;
validate();
}
void validate()
{
goodInput = true;
if (boardSize.width <= 0 || boardSize.height <= 0)
{
cerr << "Invalid Board size: " << boardSize.width << " " << boardSize.height << endl;
goodInput = false;
}
if (squareSize <= 10e-6)
{
cerr << "Invalid square size " << squareSize << endl;
goodInput = false;
}
if (nrFrames <= 0)
{
cerr << "Invalid number of frames " << nrFrames << endl;
goodInput = false;
}
if (input.empty()) // Check for valid input
inputType = INVALID;
else
{
if (input[0] >= '0' && input[0] <= '9')
{
stringstream ss(input);
ss >> cameraID;
inputType = CAMERA;
}
else
{
if (isListOfImages(input) && readStringList(input, imageList))
{
inputType = IMAGE_LIST;
nrFrames = (nrFrames < (int)imageList.size()) ? nrFrames : (int)imageList.size();
}
else
inputType = VIDEO_FILE;
}
if (inputType == CAMERA)
inputCapture.open(cameraID);
if (inputType == VIDEO_FILE)
inputCapture.open(input);
if (inputType != IMAGE_LIST && !inputCapture.isOpened())
inputType = INVALID;
}
if (inputType == INVALID)
{
cerr << " Input does not exist: " << input;
goodInput = false;
}
flag = 0;
if(calibFixPrincipalPoint) flag |= CALIB_FIX_PRINCIPAL_POINT;
if(calibZeroTangentDist) flag |= CALIB_ZERO_TANGENT_DIST;
if(aspectRatio) flag |= CALIB_FIX_ASPECT_RATIO;
if(fixK1) flag |= CALIB_FIX_K1;
if(fixK2) flag |= CALIB_FIX_K2;
if(fixK3) flag |= CALIB_FIX_K3;
if(fixK4) flag |= CALIB_FIX_K4;
if(fixK5) flag |= CALIB_FIX_K5;
if (useFisheye) {
// the fisheye model has its own enum, so overwrite the flags
flag = fisheye::CALIB_FIX_SKEW | fisheye::CALIB_RECOMPUTE_EXTRINSIC;
if(fixK1) flag |= fisheye::CALIB_FIX_K1;
if(fixK2) flag |= fisheye::CALIB_FIX_K2;
if(fixK3) flag |= fisheye::CALIB_FIX_K3;
if(fixK4) flag |= fisheye::CALIB_FIX_K4;
if (calibFixPrincipalPoint) flag |= fisheye::CALIB_FIX_PRINCIPAL_POINT;
}
calibrationPattern = NOT_EXISTING;
if (!patternToUse.compare("CHESSBOARD")) calibrationPattern = CHESSBOARD;
if (!patternToUse.compare("CIRCLES_GRID")) calibrationPattern = CIRCLES_GRID;
if (!patternToUse.compare("ASYMMETRIC_CIRCLES_GRID")) calibrationPattern = ASYMMETRIC_CIRCLES_GRID;
if (calibrationPattern == NOT_EXISTING)
{
cerr << " Camera calibration mode does not exist: " << patternToUse << endl;
goodInput = false;
}
atImageList = 0;
}
Mat nextImage()
{
Mat result;
if( inputCapture.isOpened() )
{
Mat view0;
inputCapture >> view0;
view0.copyTo(result);
}
else if( atImageList < imageList.size() )
result = imread(imageList[atImageList++], IMREAD_COLOR);
return result;
}
static bool readStringList( const string& filename, vector& l )
{
l.clear();
FileStorage fs(filename, FileStorage::READ);
if( !fs.isOpened() )
return false;
FileNode n = fs.getFirstTopLevelNode();
if( n.type() != FileNode::SEQ )
return false;
FileNodeIterator it = n.begin(), it_end = n.end();
for( ; it != it_end; ++it )
l.push_back((string)*it);
return true;
}
static bool isListOfImages( const string& filename)
{
string s(filename);
// Look for file extension
if( s.find(".xml") == string::npos && s.find(".yaml") == string::npos && s.find(".yml") == string::npos )
return false;
else
return true;
}
public:
Size boardSize; // The size of the board -> Number of items by width and height
Pattern calibrationPattern; // One of the Chessboard, circles, or asymmetric circle pattern
float squareSize; // The size of a square in your defined unit (point, millimeter,etc).
int nrFrames; // The number of frames to use from the input for calibration
float aspectRatio; // The aspect ratio
int delay; // In case of a video input
bool writePoints; // Write detected feature points
bool writeExtrinsics; // Write extrinsic parameters
bool calibZeroTangentDist; // Assume zero tangential distortion
bool calibFixPrincipalPoint; // Fix the principal point at the center
bool flipVertical; // Flip the captured images around the horizontal axis
string outputFileName; // The name of the file where to write
bool showUndistorsed; // Show undistorted images after calibration
string input; // The input ->
bool useFisheye; // use fisheye camera model for calibration
bool fixK1; // fix K1 distortion coefficient
bool fixK2; // fix K2 distortion coefficient
bool fixK3; // fix K3 distortion coefficient
bool fixK4; // fix K4 distortion coefficient
bool fixK5; // fix K5 distortion coefficient
int cameraID;
vector imageList;
size_t atImageList;
VideoCapture inputCapture;
InputType inputType;
bool goodInput;
int flag;
private:
string patternToUse;
};
static inline void read(const FileNode& node, Settings& x, const Settings& default_value = Settings())
{
if(node.empty())
x = default_value;
else
x.read(node);
}
enum { DETECTION = 0, CAPTURING = 1, CALIBRATED = 2 };
bool runCalibrationAndSave(Settings& s, Size imageSize, Mat& cameraMatrix, Mat& distCoeffs,
vector > imagePoints );
int main(int argc, char* argv[])
{
help();
//! [file_read]
Settings s;
const string inputSettingsFile = argc > 1 ? argv[1] : "default.xml";
FileStorage fs(inputSettingsFile, FileStorage::READ); // Read the settings
if (!fs.isOpened())
{
cout << "Could not open the configuration file: \"" << inputSettingsFile << "\"" << endl;
return -1;
}
fs["Settings"] >> s;
fs.release(); // close Settings file
//! [file_read]
//FileStorage fout("settings.yml", FileStorage::WRITE); // write config as YAML
//fout << "Settings" << s;
if (!s.goodInput)
{
cout << "Invalid input detected. Application stopping. " << endl;
return -1;
}
vector > imagePoints;
Mat cameraMatrix, distCoeffs;
Size imageSize;
int mode = s.inputType == Settings::IMAGE_LIST ? CAPTURING : DETECTION;
clock_t prevTimestamp = 0;
const Scalar RED(0,0,255), GREEN(0,255,0);
const char ESC_KEY = 27;
//! [get_input]
for(;;)
{
Mat view;
bool blinkOutput = false;
view = s.nextImage();
//----- If no more image, or got enough, then stop calibration and show result -------------
if( mode == CAPTURING && imagePoints.size() >= (size_t)s.nrFrames )
{
if( runCalibrationAndSave(s, imageSize, cameraMatrix, distCoeffs, imagePoints))
mode = CALIBRATED;
else
mode = DETECTION;
}
if(view.empty()) // If there are no more images stop the loop
{
// if calibration threshold was not reached yet, calibrate now
if( mode != CALIBRATED && !imagePoints.empty() )
runCalibrationAndSave(s, imageSize, cameraMatrix, distCoeffs, imagePoints);
break;
}
//! [get_input]
imageSize = view.size(); // Format input image.
if( s.flipVertical ) flip( view, view, 0 );
//! [find_pattern]
vector pointBuf;
bool found;
int chessBoardFlags = CALIB_CB_ADAPTIVE_THRESH | CALIB_CB_NORMALIZE_IMAGE;
if(!s.useFisheye) {
// fast check erroneously fails with high distortions like fisheye
chessBoardFlags |= CALIB_CB_FAST_CHECK;
}
switch( s.calibrationPattern ) // Find feature points on the input format
{
case Settings::CHESSBOARD:
found = findChessboardCorners( view, s.boardSize, pointBuf, chessBoardFlags);
break;
case Settings::CIRCLES_GRID:
found = findCirclesGrid( view, s.boardSize, pointBuf );
break;
case Settings::ASYMMETRIC_CIRCLES_GRID:
found = findCirclesGrid( view, s.boardSize, pointBuf, CALIB_CB_ASYMMETRIC_GRID );
break;
default:
found = false;
break;
}
//! [find_pattern]
//! [pattern_found]
if ( found) // If done with success,
{
// improve the found corners' coordinate accuracy for chessboard
if( s.calibrationPattern == Settings::CHESSBOARD)
{
Mat viewGray;
cvtColor(view, viewGray, COLOR_BGR2GRAY);
cornerSubPix( viewGray, pointBuf, Size(11,11),
Size(-1,-1), TermCriteria( TermCriteria::EPS+TermCriteria::COUNT, 30, 0.1 ));
}
if( mode == CAPTURING && // For camera only take new samples after delay time
(!s.inputCapture.isOpened() || clock() - prevTimestamp > s.delay*1e-3*CLOCKS_PER_SEC) )
{
imagePoints.push_back(pointBuf);
prevTimestamp = clock();
blinkOutput = s.inputCapture.isOpened();
}
// Draw the corners.
drawChessboardCorners( view, s.boardSize, Mat(pointBuf), found );
}
//! [pattern_found]
//----------------------------- Output Text ------------------------------------------------
//! [output_text]
string msg = (mode == CAPTURING) ? "100/100" :
mode == CALIBRATED ? "Calibrated" : "Press 'g' to start";
int baseLine = 0;
Size textSize = getTextSize(msg, 1, 1, 1, &baseLine);
Point textOrigin(view.cols - 2*textSize.width - 10, view.rows - 2*baseLine - 10);
if( mode == CAPTURING )
{
if(s.showUndistorsed)
msg = format( "%d/%d Undist", (int)imagePoints.size(), s.nrFrames );
else
msg = format( "%d/%d", (int)imagePoints.size(), s.nrFrames );
}
putText( view, msg, textOrigin, 1, 1, mode == CALIBRATED ? GREEN : RED);
if( blinkOutput )
bitwise_not(view, view);
//! [output_text]
//------------------------- Video capture output undistorted ------------------------------
//! [output_undistorted]
if( mode == CALIBRATED && s.showUndistorsed )
{
Mat temp = view.clone();
if (s.useFisheye)
cv::fisheye::undistortImage(temp, view, cameraMatrix, distCoeffs);
else
undistort(temp, view, cameraMatrix, distCoeffs);
}
//! [output_undistorted]
//------------------------------ Show image and check for input commands -------------------
//! [await_input]
imshow("Image View", view);
char key = (char)waitKey(s.inputCapture.isOpened() ? 50 : s.delay);
if( key == ESC_KEY )
break;
if( key == 'u' && mode == CALIBRATED )
s.showUndistorsed = !s.showUndistorsed;
if( s.inputCapture.isOpened() && key == 'g' )
{
mode = CAPTURING;
imagePoints.clear();
}
//! [await_input]
}
// -----------------------Show the undistorted image for the image list ------------------------
//! [show_results]
if( s.inputType == Settings::IMAGE_LIST && s.showUndistorsed )
{
Mat view, rview, map1, map2;
if (s.useFisheye)
{
Mat newCamMat;
fisheye::estimateNewCameraMatrixForUndistortRectify(cameraMatrix, distCoeffs, imageSize,
Matx33d::eye(), newCamMat, 1);
fisheye::initUndistortRectifyMap(cameraMatrix, distCoeffs, Matx33d::eye(), newCamMat, imageSize,
CV_16SC2, map1, map2);
}
else
{
initUndistortRectifyMap(
cameraMatrix, distCoeffs, Mat(),
getOptimalNewCameraMatrix(cameraMatrix, distCoeffs, imageSize, 1, imageSize, 0), imageSize,
CV_16SC2, map1, map2);
}
for(size_t i = 0; i < s.imageList.size(); i++ )
{
view = imread(s.imageList[i], IMREAD_COLOR);
if(view.empty())
continue;
remap(view, rview, map1, map2, INTER_LINEAR);
imshow("Image View", rview);
char c = (char)waitKey();
if( c == ESC_KEY || c == 'q' || c == 'Q' )
break;
}
}
//! [show_results]
return 0;
}
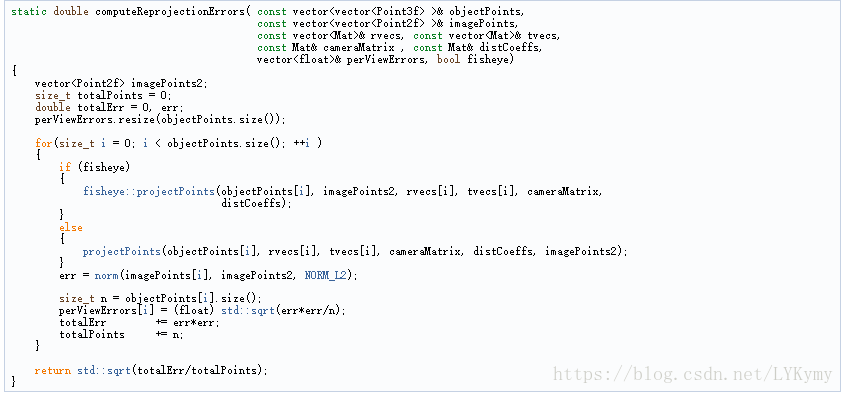
//! [compute_errors]
static double computeReprojectionErrors( const vector >& objectPoints,
const vector >& imagePoints,
const vector& rvecs, const vector& tvecs,
const Mat& cameraMatrix , const Mat& distCoeffs,
vector& perViewErrors, bool fisheye)
{
vector imagePoints2;
size_t totalPoints = 0;
double totalErr = 0, err;
perViewErrors.resize(objectPoints.size());
for(size_t i = 0; i < objectPoints.size(); ++i )
{
if (fisheye)
{
fisheye::projectPoints(objectPoints[i], imagePoints2, rvecs[i], tvecs[i], cameraMatrix,
distCoeffs);
}
else
{
projectPoints(objectPoints[i], rvecs[i], tvecs[i], cameraMatrix, distCoeffs, imagePoints2);
}
err = norm(imagePoints[i], imagePoints2, NORM_L2);
size_t n = objectPoints[i].size();
perViewErrors[i] = (float) std::sqrt(err*err/n);
totalErr += err*err;
totalPoints += n;
}
return std::sqrt(totalErr/totalPoints);
}
//! [compute_errors]
//! [board_corners]
static void calcBoardCornerPositions(Size boardSize, float squareSize, vector& corners,
Settings::Pattern patternType /*= Settings::CHESSBOARD*/)
{
corners.clear();
switch(patternType)
{
case Settings::CHESSBOARD:
case Settings::CIRCLES_GRID:
for( int i = 0; i < boardSize.height; ++i )
for( int j = 0; j < boardSize.width; ++j )
corners.push_back(Point3f(j*squareSize, i*squareSize, 0));
break;
case Settings::ASYMMETRIC_CIRCLES_GRID:
for( int i = 0; i < boardSize.height; i++ )
for( int j = 0; j < boardSize.width; j++ )
corners.push_back(Point3f((2*j + i % 2)*squareSize, i*squareSize, 0));
break;
default:
break;
}
}
//! [board_corners]
static bool runCalibration( Settings& s, Size& imageSize, Mat& cameraMatrix, Mat& distCoeffs,
vector > imagePoints, vector& rvecs, vector& tvecs,
vector& reprojErrs, double& totalAvgErr)
{
//! [fixed_aspect]
cameraMatrix = Mat::eye(3, 3, CV_64F);
if( s.flag & CALIB_FIX_ASPECT_RATIO )
cameraMatrix.at(0,0) = s.aspectRatio;
//! [fixed_aspect]
if (s.useFisheye) {
distCoeffs = Mat::zeros(4, 1, CV_64F);
} else {
distCoeffs = Mat::zeros(8, 1, CV_64F);
}
vector > objectPoints(1);
calcBoardCornerPositions(s.boardSize, s.squareSize, objectPoints[0], s.calibrationPattern);
objectPoints.resize(imagePoints.size(),objectPoints[0]);
//Find intrinsic and extrinsic camera parameters
double rms;
if (s.useFisheye) {
Mat _rvecs, _tvecs;
rms = fisheye::calibrate(objectPoints, imagePoints, imageSize, cameraMatrix, distCoeffs, _rvecs,
_tvecs, s.flag);
rvecs.reserve(_rvecs.rows);
tvecs.reserve(_tvecs.rows);
for(int i = 0; i < int(objectPoints.size()); i++){
rvecs.push_back(_rvecs.row(i));
tvecs.push_back(_tvecs.row(i));
}
} else {
rms = calibrateCamera(objectPoints, imagePoints, imageSize, cameraMatrix, distCoeffs, rvecs, tvecs,
s.flag);
}
cout << "Re-projection error reported by calibrateCamera: "<< rms << endl;
bool ok = checkRange(cameraMatrix) && checkRange(distCoeffs);
totalAvgErr = computeReprojectionErrors(objectPoints, imagePoints, rvecs, tvecs, cameraMatrix,
distCoeffs, reprojErrs, s.useFisheye);
return ok;
}
// Print camera parameters to the output file
static void saveCameraParams( Settings& s, Size& imageSize, Mat& cameraMatrix, Mat& distCoeffs,
const vector& rvecs, const vector& tvecs,
const vector& reprojErrs, const vector >& imagePoints,
double totalAvgErr )
{
FileStorage fs( s.outputFileName, FileStorage::WRITE );
time_t tm;
time( &tm );
struct tm *t2 = localtime( &tm );
char buf[1024];
strftime( buf, sizeof(buf), "%c", t2 );
fs << "calibration_time" << buf;
if( !rvecs.empty() || !reprojErrs.empty() )
fs << "nr_of_frames" << (int)std::max(rvecs.size(), reprojErrs.size());
fs << "image_width" << imageSize.width;
fs << "image_height" << imageSize.height;
fs << "board_width" << s.boardSize.width;
fs << "board_height" << s.boardSize.height;
fs << "square_size" << s.squareSize;
if( s.flag & CALIB_FIX_ASPECT_RATIO )
fs << "fix_aspect_ratio" << s.aspectRatio;
if (s.flag)
{
std::stringstream flagsStringStream;
if (s.useFisheye)
{
flagsStringStream << "flags:"
<< (s.flag & fisheye::CALIB_FIX_SKEW ? " +fix_skew" : "")
<< (s.flag & fisheye::CALIB_FIX_K1 ? " +fix_k1" : "")
<< (s.flag & fisheye::CALIB_FIX_K2 ? " +fix_k2" : "")
<< (s.flag & fisheye::CALIB_FIX_K3 ? " +fix_k3" : "")
<< (s.flag & fisheye::CALIB_FIX_K4 ? " +fix_k4" : "")
<< (s.flag & fisheye::CALIB_RECOMPUTE_EXTRINSIC ? " +recompute_extrinsic" : "");
}
else
{
flagsStringStream << "flags:"
<< (s.flag & CALIB_USE_INTRINSIC_GUESS ? " +use_intrinsic_guess" : "")
<< (s.flag & CALIB_FIX_ASPECT_RATIO ? " +fix_aspectRatio" : "")
<< (s.flag & CALIB_FIX_PRINCIPAL_POINT ? " +fix_principal_point" : "")
<< (s.flag & CALIB_ZERO_TANGENT_DIST ? " +zero_tangent_dist" : "")
<< (s.flag & CALIB_FIX_K1 ? " +fix_k1" : "")
<< (s.flag & CALIB_FIX_K2 ? " +fix_k2" : "")
<< (s.flag & CALIB_FIX_K3 ? " +fix_k3" : "")
<< (s.flag & CALIB_FIX_K4 ? " +fix_k4" : "")
<< (s.flag & CALIB_FIX_K5 ? " +fix_k5" : "");
}
fs.writeComment(flagsStringStream.str());
}
fs << "flags" << s.flag;
fs << "fisheye_model" << s.useFisheye;
fs << "camera_matrix" << cameraMatrix;
fs << "distortion_coefficients" << distCoeffs;
fs << "avg_reprojection_error" << totalAvgErr;
if (s.writeExtrinsics && !reprojErrs.empty())
fs << "per_view_reprojection_errors" << Mat(reprojErrs);
if(s.writeExtrinsics && !rvecs.empty() && !tvecs.empty() )
{
CV_Assert(rvecs[0].type() == tvecs[0].type());
Mat bigmat((int)rvecs.size(), 6, CV_MAKETYPE(rvecs[0].type(), 1));
bool needReshapeR = rvecs[0].depth() != 1 ? true : false;
bool needReshapeT = tvecs[0].depth() != 1 ? true : false;
for( size_t i = 0; i < rvecs.size(); i++ )
{
Mat r = bigmat(Range(int(i), int(i+1)), Range(0,3));
Mat t = bigmat(Range(int(i), int(i+1)), Range(3,6));
if(needReshapeR)
rvecs[i].reshape(1, 1).copyTo(r);
else
{
//*.t() is MatExpr (not Mat) so we can use assignment operator
CV_Assert(rvecs[i].rows == 3 && rvecs[i].cols == 1);
r = rvecs[i].t();
}
if(needReshapeT)
tvecs[i].reshape(1, 1).copyTo(t);
else
{
CV_Assert(tvecs[i].rows == 3 && tvecs[i].cols == 1);
t = tvecs[i].t();
}
}
fs.writeComment("a set of 6-tuples (rotation vector + translation vector) for each view");
fs << "extrinsic_parameters" << bigmat;
}
if(s.writePoints && !imagePoints.empty() )
{
Mat imagePtMat((int)imagePoints.size(), (int)imagePoints[0].size(), CV_32FC2);
for( size_t i = 0; i < imagePoints.size(); i++ )
{
Mat r = imagePtMat.row(int(i)).reshape(2, imagePtMat.cols);
Mat imgpti(imagePoints[i]);
imgpti.copyTo(r);
}
fs << "image_points" << imagePtMat;
}
}
//! [run_and_save]
bool runCalibrationAndSave(Settings& s, Size imageSize, Mat& cameraMatrix, Mat& distCoeffs,
vector > imagePoints)
{
vector rvecs, tvecs;
vector reprojErrs;
double totalAvgErr = 0;
bool ok = runCalibration(s, imageSize, cameraMatrix, distCoeffs, imagePoints, rvecs, tvecs, reprojErrs,
totalAvgErr);
cout << (ok ? "Calibration succeeded" : "Calibration failed")
<< ". avg re projection error = " << totalAvgErr << endl;
if (ok)
saveCameraParams(s, imageSize, cameraMatrix, distCoeffs, rvecs, tvecs, reprojErrs, imagePoints,
totalAvgErr);
return ok;
} 解释
- 读取设置

- 为此,我使用了简单的OpenCV类输入操作。 在阅读文件后,有一个额外的后处理功能,可以检查输入的有效性。 只有当所有输入都良好时,goodInput变量才为真。
- 获取下一个输入,如果它失败或我们有足够的 - 校准
- 在此之后,我们进行了一个大循环,我们执行以下操作:从图像列表,相机或视频文件中获取下一个图像。 如果失败或我们有足够的图像,那么我们运行校准过程。 在图像的情况下,我们走出循环,否则通过从检测模式改变到校准模式,剩余的帧将不失真(如果设置了选项)。
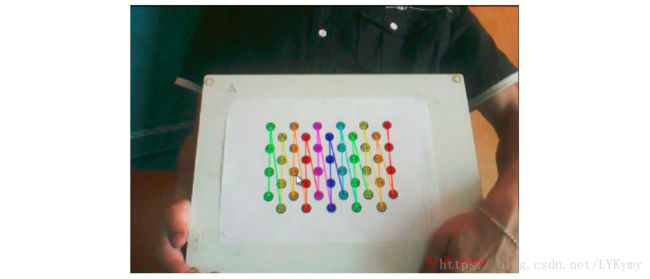
- 在当前输入中查找模式
- 在上面提到的方程的形成旨在找到输入中的主要模式:在棋盘的情况下,这是正方形的角,对于圆,则是圆圈本身。 这些位置将形成将被写入pointBuf向量的结果。
- 根据输入模式的类型,您可以使用cv :: findChessboardCorners或cv :: findCirclesGrid函数。 对于它们两者,您传递当前图像和板的大小,您将获得模式的位置。 此外,它们返回一个布尔变量,该变量表明是否在输入中找到了模式(我们只需要考虑那些真实的图像!)。
- 然后,在相机的情况下,我们仅在输入延迟时间过去时拍摄相机图像。 这样做是为了允许用户移动棋盘并获得不同的图像。 类似的图像导致类似的方程,并且校准步骤中的类似方程将形成不适定的问题,因此校准将失败。 对于方形图像,角落的位置仅是近似的。 我们可以通过调用cv :: cornerSubPix函数来改进它。 它将产生更好的校准结果。 在此之后,我们向imagePoints向量添加一个有效的输入结果,以将所有方程式收集到一个容器中。 最后,为了可视化反馈,我们将使用cv :: findChessboardCorners函数在输入图像上绘制找到的点。

- 向用户显示状态和结果,以及应用程序的命令行控制

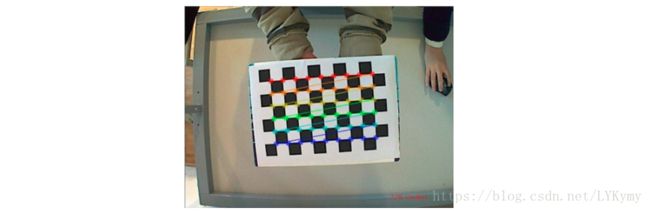
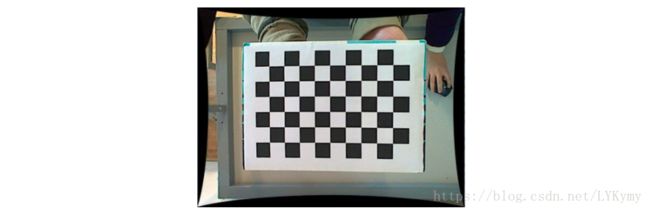
- 如果我们运行校准并获得具有失真系数的相机矩阵,我们可能需要使用cv :: undistort函数来校正图像:

- 然后我们显示图像并等待输入键,如果这是u我们切换失真删除,如果是g我们再次开始检测过程,最后我们退出应用程序的ESC键:

- 显示图像的失真消除。使
- 用图像列表时,无法消除循环内的失真。 因此,您必须在循环后执行此操作。 利用这一点,我将扩展cv :: undistort函数,实际上首先调用cv :: initUndistortRectifyMap来查找转换矩阵,然后使用cv :: remap函数执行转换。 因为,在成功校准地图计算只需要进行一次后,通过使用此扩展形式,您可以加快应用程序:
- 校准并保存。由于每台摄像机只需要进行一次校准,因此在成功校准后保存校准是有意义的。 这样,您可以稍后将这些值加载到程序中。 因此我们首先进行校准,如果成功,我们将结果保存为OpenCV样式的XML或YAML文件,具体取决于您在配置文件中提供的扩展名。
- 因此,在第一个函数中,我们将这两个过程分开。 因为我们想要保存许多校准变量,所以我们将在这里创建这些变量,并将它们传递给校准和保存功能。 同样,我不会显示保存部分,因为它与校准几乎没有共同之处。
我们在cv :: calibrateCamera函数的帮助下进行校准。 它具有以下参数:
- 对象指出。 这是Point3f向量的向量,对于每个输入图像描述了图案应该如何看。 如果我们有一个平面图案(如棋盘),那么我们可以简单地将所有Z坐标设置为零。 这是存在这些重要点的点的集合。 因为,我们对所有输入图像使用单个模式,我们只需计算一次,然后将其与所有其他输入视图相乘。 我们使用calcBoardCornerPositions函数计算角点:

- 然后将其乘以:

- 图像点。 这是Point2f矢量的矢量,其对于每个输入图像包含重要点的坐标(棋盘的角和圆形图案的圆的中心)。 我们已经从cv :: findChessboardCorners或cv :: findCirclesGrid函数中收集了这个。 我们只需要传递它。
- 从相机,视频文件或图像中获取的图像大小。
- 相机矩阵。 如果我们使用固定宽高比选项,我们需要设置fx:

- 失真系数矩阵。 初始化为零。

- 对于所有视图,该函数将计算旋转和平移向量,其将对象点(在模型坐标空间中给出)变换为图像点(在世界坐标空间中给出)。 第7和第8参数是矩阵的输出矢量,其在第i个位置包含第i个对象点到第i个图像点的旋转和平移矢量。
- 最后一个参数是标志。 您需要在此处指定选项,例如固定焦距的纵横比,假设零切向失真或固定主点。

- 该函数返回平均重新投影误差。 该数字可以很好地估计找到的参数的精度。 这应该尽可能接近零。 给定内在,失真,旋转和平移矩阵,我们可以通过使用cv :: projectPoints将对象点转换为图像点来计算一个视图的误差。 然后我们计算我们的变换得到的绝对范数和角点/圆寻找算法。 为了找到平均误差,我们计算了为所有校准图像计算的误差的算术平均值。
效果
在指定输出XML / YAML文件的两种情况下,您都可以找到相机和失真系数矩阵:
