8月8日程序备份——找挡板角度及平移误差
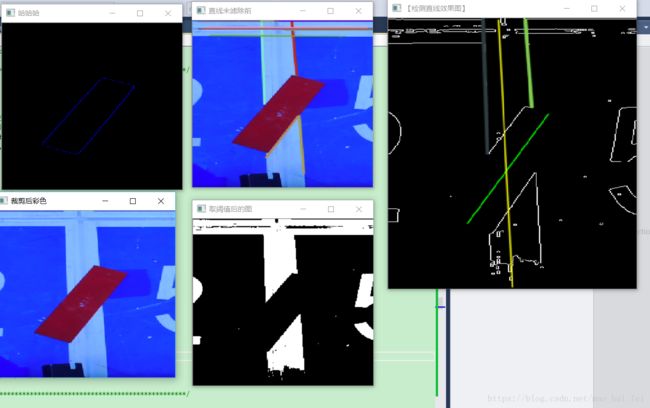
效果图
程序
/**************************************************************************************
该程序功能:放置挡板
* flag 1 前进
* flag -1 后退
* flag 2 横走右
* flag -2 横走左
* flag 3 找中心
Forward_flag = -2;//发送开环左走指令
* flag 4 爪子直立起来的,且有磁性,此时手动往机械臂上放置挡板
* flag -4 爪子到了位置,开始放置,发送一次即可
* flag 9 右转90度
* flag -9 左转90度
* flag 18 右转180度
* flag -18 左转180度
* flag 18 右转180度
* flag -100 放下棋子
方向dir: 0.从下往上看
1.从左往右看
2.从上往下看
3.从右往左看
3 开启找棋子中心模式
4 代表先打开电磁铁 -4放下 针对于障碍
****************************************************************************************/
#include
#include
#includeg) ? (r) : (g));
maxRGB = (maxRGB>b) ? (maxRGB) : (b);
sum = r + g + b;
i = sum / 3.0;
if (i<0.001 || maxRGB - minRGB<0.001)
{
h = 0.0;
s = 0.0;
}
else
{
s = 1.0 - 3.0*minRGB / sum;
theta = sqrt((r - g)*(r - g) + (r - b)*(g - b));
theta = acos((r - g + r - b)*0.5 / theta);
if (b <= g)
h = theta;
else
h = 2 * PI - theta;
if (s <= 0.01)
h = 0;
}
hue = (int)(h * 180 / PI);
saturation = (int)(s * 100);
intensity = (int)(i * 100);
}
//
///***** 求两点间距离*****/
//float getDistance(CvPoint pointO, CvPoint pointA)
//{
// float distance;
// distance = powf((pointO.x - pointA.x), 2) + powf((pointO.y - pointA.y), 2);
// distance = sqrtf(distance);
// return distance;
//}
//原点到直线的距离
//输入一堆直线,返回直线到坐标原点的距离
vector <float> get_0_distance(vectordouble)(lines[i][3] - lines[i][1]) / (double)(lines[i][2] - lines[i][0]); //求出直线的斜率
lines_arctan.push_back(atan(k));
}
return lines_arctan;
}
/***** 点到一堆直线的距离:P到lines的距离*****/
vector <float> getDist_P2L_yibanshi(Point2f pointP, vectordouble)(lines[i][3] - lines[i][1]) / (double)(lines[i][2] - lines[i][0]); //求出直线的斜率// -3.1415926/2-----+3.1415926/2
b = (double)lines[i][1] - k * (double)lines[i][0]; //求出直线的截距
lines_fangcheng.push_back(Point2d(k, b));
}
return lines_fangcheng;
}
//填充
void fillHole(const Mat srcBw, Mat &dstBw)
{
Size m_Size = srcBw.size();
Mat Temp = Mat::zeros(m_Size.height + 2, m_Size.width + 2, srcBw.type());//延展图像
srcBw.copyTo(Temp(Range(1, m_Size.height + 1), Range(1, m_Size.width + 1)));
cv::floodFill(Temp, Point(0, 0), Scalar(255, 255, 255));//填充区域
Mat cutImg;//裁剪延展的图像
Temp(Range(1, m_Size.height + 1), Range(1, m_Size.width + 1)).copyTo(cutImg);
dstBw = srcBw | (~cutImg);
}
输入一堆直线,返回每条直线的一般式方程
Vec2f为2个点的float,参照存储直线的数据结构
//vector > get_lines_yibanshi_fangcheng(vector lines)
//{
// //1.分别求角点0、1与角点2、3所对应的两根直线
// vector > fangcheng_PARAM;
// vector fangcheng_temp;
// float A0 = 0, B0 = 0, C0 = 0;
// for (unsigned int i = 0; i
// {
// A0 = (float)(lines[i][1] - lines[i][3]);
// B0 = (float)(lines[i][2] - lines[i][0]);
// C0 = (float)(lines[i][0] * lines[i][3] - lines[i][1] * lines[i][2]);
//
// //A0 = (float)(Connor[0].y - Connor[1].y);
// //B0 = (float)(Connor[1].x - Connor[0].x);
// //C0 = (float)(Connor[0].x*Connor[1].y - Connor[0].y*Connor[1].x);
// fangcheng_temp.push_back(A0);
// fangcheng_temp.push_back(B0);
// fangcheng_temp.push_back(C0);
//
// fangcheng_PARAM.push_back(fangcheng_temp);
//
// }
// return fangcheng_PARAM;
//}
//输入一堆直线,返回每条直线的一般式方程
//Vec2f为2个点的float,参照存储直线的数据结构
vector <float> get_lines_yibanshi_fangcheng(vector> fangcheng_PARAM;
vector<float> fangcheng_temp;
for (unsigned int i = 0; ifloat A0 = 0, B0 = 0, C0 = 0;
A0 = (float)(lines[i][1] - lines[i][3]);
B0 = (float)(lines[i][2] - lines[i][0]);
C0 = (float)(lines[i][0] * lines[i][3] - lines[i][1] * lines[i][2]);
//A0 = (float)(Connor[0].y - Connor[1].y);
//B0 = (float)(Connor[1].x - Connor[0].x);
//C0 = (float)(Connor[0].x*Connor[1].y - Connor[0].y*Connor[1].x);
fangcheng_temp.push_back(A0);
fangcheng_temp.push_back(B0);
fangcheng_temp.push_back(C0);
// fangcheng_PARAM.push_back(fangcheng_temp);
}
return fangcheng_temp;
}
/*******************************************************************************************
*函数功能 : 输入两条直线(每条直线以斜率和截距确定),返回两直线夹角,0为弧度,1为角度
*输入参数 : line_1_k为一条直线斜率,line_2_k为另一条直线斜率,aaa为0则为弧度,反之则为角度
*返 回 值 : float型弧度或者角度,有正负,为直线2相对于直线1的角度
*编写时间 : 2018.8.5
*作 者 : 毛哥
********************************************************************************************/
float get_lines_arctan(float line_1_k, float line_2_k, int aaa)
{
if (aaa == 0)
{
float tan_k = 0; //直线夹角正切值
float lines_arctan;//直线斜率的反正切值
tan_k = (line_2_k - line_1_k) / (1 + line_2_k*line_1_k); //求直线夹角的公式
lines_arctan = atan(tan_k);
return lines_arctan;
}
else
{
float tan_k = 0; //直线夹角正切值
float lines_arctan;//直线斜率的反正切值
tan_k = (line_2_k - line_1_k) / (1 + line_2_k*line_1_k); //求直线夹角的公式
lines_arctan = atan(tan_k)* 180.0 / 3.1415926;
return lines_arctan;
}
}
/*******************************************************************************************
*函数功能 : 输入两条直线(输入一般式三个参数),返回两直线夹角,0为弧度
*输入参数 : Param_A1、Param_B1、Param_C1 \Param_2、Param_B2、Param_C2输入一般式三个参数
*返 回 值 : double 型角度,有正负,为直线2相对于直线1的角度
*编写时间 : 2018.8.6
*作 者 : 毛哥
********************************************************************************************/
double get_lines_yibanshi_arctan(double Param_A1, double Param_B1, double Param_C1, double Param_A2, double Param_B2, double Param_C2)
{
double tan_k = 0; //直线夹角正切值
double lines_arctan;//直线斜率的反正切值
double line_1_k = 0;
double line_2_k = 0;
// tan_k = (line_2_k - line_1_k) / (1 + line_2_k*line_1_k); //求直线夹角的公式
if (fabs(Param_B1) > 0.001 && fabs(Param_B2) > 0.001)
{
line_1_k = -Param_A1 / Param_B1;
line_2_k = -Param_A2 / Param_B2;
//若两直线垂直,即k1k2 = -1,此时夹角为90°;
if (line_1_k*line_2_k != -1)
{
tan_k = (line_2_k - line_1_k) / (1 + line_2_k*line_1_k); //求直线夹角的公式
//tan_k = (Param_A1*Param_A2 + Param_B1*Param_B2) / (sqrt(Param_A1*Param_A1 + Param_B1*Param_B1)*sqrt(Param_A2*Param_A2 + Param_B2*Param_B2));
lines_arctan = atan(tan_k)* 180.0 / 3.1415926;;
}
}
else if (Param_B1 < 0.0001&& Param_B2>0.0001)
{
tan_k = -Param_A2 / Param_B2;
lines_arctan = atan(tan_k);
lines_arctan = (3.1415926 / 2 - lines_arctan)* 180.0 / 3.1415926;
}
else if (Param_B1 > 0.0001&&Param_B2 < 0.0001)
{
tan_k = -Param_A1 / Param_B1;
lines_arctan = atan(tan_k);
lines_arctan = (lines_arctan - 3.1415926 / 2)* 180.0 / 3.1415926;
}
else
{
lines_arctan = 0;
}
return lines_arctan;
}
//输入一直线的两个端点,返回该直线的一般式方程
vector <float> get_lines_yibanshi_fangcheng_2(Point2f Point_A, Point2f Point_B)
{
//1.分别求角点0、1与角点2、3所对应的两根直线
//vector > fangcheng_PARAM;
vector<float> fangcheng_temp;
float A0 = 0, B0 = 0, C0 = 0;
//A0 = (float)(lines[i][1] - lines[i][3]);
//B0 = (float)(lines[i][2] - lines[i][0]);
//C0 = (float)(lines[i][0] * lines[i][3] - lines[i][1] * lines[i][2]);
A0 = (float)(Point_A.y - Point_B.y);
B0 = (float)(Point_B.x - Point_A.x);
C0 = (float)(Point_A.x*Point_B.y - Point_A.y*Point_B.x);
fangcheng_temp.push_back(A0);
fangcheng_temp.push_back(B0);
fangcheng_temp.push_back(C0);
//fangcheng_PARAM.push_back(fangcheng_temp);
return fangcheng_temp;
}
Mat frame1; //全局变量前方摄像头图像
Mat frame2; //全局变量顶部摄像头图像
VideoCapture capcap_1(1); //前方摄像头
VideoCapture capcap_2(0); //顶部 摄像头
int main()
{
capcap_2.set(CAP_PROP_FRAME_WIDTH, 1280.0);//设置摄像头采集图像分辨率
capcap_2.set(CAP_PROP_FRAME_HEIGHT, 720.0);
capcap_1.set(CAP_PROP_FRAME_WIDTH, 1280.0);//设置摄像头采集图像分辨率
capcap_1.set(CAP_PROP_FRAME_HEIGHT, 720.0);
if (!capcap_2.isOpened())return 0;
if (!capcap_1.isOpened())return 0;
for (int i = 0; i < 5; i++)
{
capcap_2 >> frame2;
}
while (1)
{
printf("\n\n\t\t\t 当前使用的OpenCV版本为" CV_VERSION"\n");
Mat srcImage0;
capcap_2 >> frame2;
//载入原图,并找到红色挡板
// Mat srcImage = imread("13.jpg", 1);
Mat srcImg;
resize(frame2, srcImg, Size(800, 600));//重定义图片大小
//namedWindow("原图", 0);
//imshow("原图", srcImg);
//waitKey(1);
int width = srcImg.cols;
int height = srcImg.rows;
int x, y;
double B = 0.0, G = 0.0, R = 0.0, H = 0.0, S = 0.0, V = 0.0;
Mat vec_rgb = Mat::zeros(srcImg.size(), CV_8UC1);
for (x = 0; x < height; x++)
{
for (y = 0; y < width; y++)
{
B = srcImg.at(x, y)[0];
G = srcImg.at(x, y)[1];
R = srcImg.at(x, y)[2];
RGB2HSV(R, G, B, H, S, V);
//红色范围,范围参考的网上。可以自己调
if ((H >= 312 && H <= 360 || H >= 0 && H <= 20) && (S >= 17 && S <= 100) && (V>18 && V < 100))
vec_rgb.at(x, y) = 255;
}
}
namedWindow("hsv空间图像", 0);
imshow("hsv空间图像", vec_rgb);
waitKey(1);
Mat element = getStructuringElement(MORPH_ELLIPSE, Size(2 * 1 + 1, 2 * 1 + 1), Point(1, 1));
Mat element1 = getStructuringElement(MORPH_ELLIPSE, Size(2 * 3 + 1, 2 * 3 + 1), Point(3, 3));
dilate(vec_rgb, vec_rgb, element1);//膨胀
/*namedWindow("膨胀", 0);
imshow("膨胀", vec_rgb);
waitKey(1);*/
erode(vec_rgb, vec_rgb, element1);//腐蚀
/*namedWindow("腐蚀", 0);
imshow("腐蚀", vec_rgb);
waitKey(1);*/
vector<vector getDist_P2L_yibanshi(Point pointP, vector lines)
get_0_distance1 = getDist_P2L_yibanshi(Point2f(0.0, 0.0), lines);
for (size_t i = 0; i < lines.size(); i++)
{
Vec4i l = lines[i];
zhixian_changdu = getDistance(Point(l[0], l[1]), Point(l[2], l[3]));
cout << "\n直线长度为" << zhixian_changdu << endl;
cout << "\n直线到原点距离为" << get_0_distance1[i] << endl;
line(image_copy_C3, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(g_rng.uniform(0, 255), g_rng.uniform(0, 255), g_rng.uniform(0, 255)), 2, LINE_AA);
float line_k;
int a;
a = lines[i][2] - lines[i][0];
cout << "\n直线斜率的参数" << a << endl;
if (fabs((double)(lines[i][2] - lines[i][0]))>0.001)
{
line_k = (double)(lines[i][3] - lines[i][1]) / (double)(lines[i][2] - lines[i][0]); //求出直线的斜率
cout << "\n直线的斜率为" << line_k << endl;
//斜率k以及b很接近的保留一条,两根直线应该是距离恒定的(一个比较稳定的范围)
//通过直线长度滤除,只剩下两条最长的,斜率要大于45度的直线
if (zhixian_changdu>70 && (lines[i][1]<60 || lines[i][3]<60) &&fabs(line_k)>1.414)
{
lines_final.push_back(lines[i]);
}
}
else
{
if (zhixian_changdu>70 && (lines[i][1] < 60 || lines[i][3] < 60))
{
lines_final.push_back(lines[i]);
}
}
}
//Scalar color = Scalar(g_rng.uniform(0, 255), g_rng.uniform(0, 255), g_rng.uniform(0, 255));//随机设置颜色
Point pt1, pt2;
double Param_A1, Param_B1, Param_C1;//过道直线
double Param_A2, Param_B2, Param_C2;//挡板中轴线
vector <float> fangcheng_PARAM_1, fangcheng_PARAM_2;
float theta, A_top_diatance, B_bottom_diatance;
//最终只能检测出两条直线
if (lines_final.size() == 2)
{
//【4】依次在图中绘制出每条线段
for (size_t i = 0; i < lines_final.size(); i++)
{
Vec4i l = lines_final[i];
line(dstImage, Point(l[0], l[1]), Point(l[2], l[3]), Scalar(g_rng.uniform(0, 255), g_rng.uniform(0, 255), g_rng.uniform(0, 255)), 2, LINE_AA);
}
//先求最终直线的方程的三个参数 A_top, B_bottom
fangcheng_PARAM_1 = get_lines_yibanshi_fangcheng(lines_final);
fangcheng_PARAM_2 = get_lines_yibanshi_fangcheng_2((Point2f)A_top, (Point2f)B_bottom);
Param_A1 = (fangcheng_PARAM_1[0] + fangcheng_PARAM_1[3]) / 2.0;
Param_B1 = (fangcheng_PARAM_1[1] + fangcheng_PARAM_1[4]) / 2.0;
Param_C1 = (fangcheng_PARAM_1[2] + fangcheng_PARAM_1[5]) / 2.0;
Param_A2 = fangcheng_PARAM_2[0];
Param_B2 = fangcheng_PARAM_2[1];
Param_C2 = fangcheng_PARAM_2[2];
/***** 7、输入A,B,C,画出线在dstImage*****/
draw_line(Param_A1, Param_B1, Param_C1, dstImage);
//最终求夹角(旋转误差)和平移误差
//两直线夹角,挡板相对于白色过道的夹角,因此白色过道直线斜率为第一个参数
theta = get_lines_yibanshi_arctan(Param_A1, Param_B1, Param_C1, Param_A2, Param_B2, Param_C2);
//点到直线距离
//P为线外一点,AB为线段两个端点
A_top_diatance = getDist_P2L_zhengfu_2(A_top, Param_A1, Param_B1, Param_C1);
B_bottom_diatance = getDist_P2L_zhengfu_2(B_bottom, Param_A1, Param_B1, Param_C1);
cout << "\n最终结果\n挡板中轴线和白色过道中轴线夹角为: " << theta << " 度" << endl;
cout << "挡板顶部中点与白色过道中轴线误差为: " << A_top_diatance << endl;
cout << "挡板底部中点与白色过道中轴线误差为: " << B_bottom_diatance << endl;
}
else
{
cout << "没有正确的找到最终的两条直线" << endl;
continue;
}
//【6】边缘检测后的图
//namedWindow("【边缘检测后的图】", 0);//参数为零,则可以自由拖动
//imshow("【边缘检测后的图】", midImage);
namedWindow("直线未滤除前", 0);
imshow("直线未滤除前", image_copy_C3);
waitKey(1);
namedWindow("【检测直线效果图】", 0);//参数为零,则可以自由拖动
imshow("【检测直线效果图】", dstImage);
waitKey(10);
}
}
//
//void Open_dicitie(void)
//{
// char Forward_flag = 4;//打开电磁铁
// int error1 = 0, error2 = 0, text = 0;
// text = error1 + error2 + Forward_flag;
// char g_UartRxBuffer[8] = { 123, -122, -121, 120, Forward_flag, (char)error1, (char)error2, (char)text };//针头(4),1个数据,一个验证
// WriteChar(g_UartRxBuffer, 8);//可以自行设置分部发送
//}
//
//
//
//
//Mat frame1; //全局变量前方摄像头图像
//Mat frame2; //全局变量顶部摄像头图像
//
//
//VideoCapture capcap_2(2); //顶部 摄像头
//VideoCapture capcap_1(1); //前方摄像头
//
//int main()
//{
//
// capcap_2.set(CAP_PROP_FRAME_WIDTH, 1280.0);//设置摄像头采集图像分辨率
// capcap_2.set(CAP_PROP_FRAME_HEIGHT, 720.0);
//
//
//
// capcap_1.set(CAP_PROP_FRAME_WIDTH, 1280.0);//设置摄像头采集图像分辨率
// capcap_1.set(CAP_PROP_FRAME_HEIGHT, 720.0);
//
// if (!capcap_2.isOpened())return 0;
// if (!capcap_1.isOpened())return 0;
//
//
// Ready_Pic();
//
//
// //Catch_chess();
// //Go_to_Number(27);
// //Put_chess(35);
//
// //第一块挡板
// Open_dicitie();
// Sleep(1200); //程序挂起两秒
// Sleep(1200); //程序挂起两秒
// Go_to_Number(35, 0);
// cout << "开始放置第一块挡板" << endl;
// Put_Dangban(35, 0);
// cout << "第一块挡板放置成功" << endl;
// Sleep(2200); //程序挂起两秒
//
// Go_to_Home();
//
//
//
// //第二块挡板
// Go_to_Number(35, 1);
// cout << "开始放置第二块挡板" << endl;
// Put_Dangban(35, 1);
// cout << "第二块挡板放置成功" << endl;
// //Sleep(2200); //程序挂起两秒
// Sleep(2200); //程序挂起两秒
// //Sleep(1200); //程序挂起两秒
// Go_to_Home();
//
// 第三块挡板
// Go_to_Number(28, 0);
// cout << "开始放置第三块挡板" << endl;
// Put_Dangban(28, 0);
// cout << "第三块挡板放置成功" << endl;
// Sleep(2200); //程序挂起两秒
// Sleep(2200); //程序挂起两秒
// Sleep(1200); //程序挂起两秒
// Go_to_Home();
//
// //第四块挡板
//
// Go_to_Number(36, 1);
// cout << "开始放置第四块挡板" << endl;
// Put_Dangban(36, 1);
// cout << "第四块挡板放置成功" << endl;
// Sleep(2200); //程序挂起两秒
// Sleep(2200); //程序挂起两秒
// Sleep(1200); //程序挂起两秒
// Go_to_Home();
//
//
// //第五块 挡板
// Go_to_Number(37, 0);
// cout << "开始放置第五块挡板" << endl;
// Put_Dangban(37, 0);
// cout << "第五块挡板放置成功" << endl;
// Sleep(2200); //程序挂起两秒
// Sleep(2200); //程序挂起两秒
// Sleep(1200); //程序挂起两秒
//
//
//
//
// //最终退场
// //1、后退20cm左右,
// for (int i = 0; i <2; i++)
// {
// char Forward_flag2 = -1;//发送开环后退指令
// char g_UartRxBuffer1[8] = { 123, -122, -121, 120, Forward_flag2, (char)(0), (char)(0), (char)Forward_flag2 };//针头(4),1个数据,一个验证
// WriteChar(g_UartRxBuffer1, 8);
// }
// Sleep(1200); //程序挂起两秒
// Sleep(1200); //程序挂起两秒
// Sleep(1200); //程序挂起两秒
//
// //3、转向180度
// for (int i = 0; i <2; i++)
// {
// char Forward_flag2 = 18;//发送开环后退指令
// char g_UartRxBuffer1[8] = { 123, -122, -121, 120, Forward_flag2, (char)(0), (char)(0), (char)Forward_flag2 };//针头(4),1个数据,一个验证
// WriteChar(g_UartRxBuffer1, 8);
// }
// Sleep(1200); //程序挂起两秒
// Sleep(2200); //程序挂起两秒
// Sleep(2200); //程序挂起两秒
// //3、前进
// for (int i = 0; i <4; i++)
// {
// char Forward_flag2 = 1;//发送开环后退指令
// char g_UartRxBuffer1[8] = { 123, -122, -121, 120, Forward_flag2, (char)(0), (char)(0), (char)Forward_flag2 };//针头(4),1个数据,一个验证
// WriteChar(g_UartRxBuffer1, 8);
// }
// Sleep(1200); //程序挂起两秒
// Sleep(1200); //程序挂起两秒
// Sleep(1200); //程序挂起两秒
//
// //3、停止
// for (int i = 0; i <4; i++)
// {
// char Forward_flag2 = 0;//发送开环后退指令
// char g_UartRxBuffer1[8] = { 123, -122, -121, 120, Forward_flag2, (char)(0), (char)(0), (char)Forward_flag2 };//针头(4),1个数据,一个验证
// WriteChar(g_UartRxBuffer1, 8);
// }
// Sleep(1200); //程序挂起两秒
// Sleep(1200); //程序挂起两秒
// Sleep(1200); //程序挂起两秒
//
// printf("Finish!");
// waitKey(0);
// return 0;
//}