斯坦福CS231n课程笔记纯干货1
CS231n的全称是CS231n: Convolutional Neural Networks for Visual Recognition,即面向视觉识别的卷积神经网络。该课程是斯坦福大学计算机视觉实验室推出的课程。目前大家说CS231n,大都指的是2016年冬季学期(一月到三月)的版本。
1. 分类器中L1和L2比较。
在面对两个向量之间的差异时,L2比L1更加不能容忍这些差异,相对于1个巨大的差异,L2距离更倾向于接受多个中等程度的差异。
2. k-Nearest Neighbor分类器存在以下不足
分类器必须记住所有训练数据并将其存储起来,以便于未来测试数据用于比较。这在存储空间上是低效的,数据集的大小很容易就以GB计。对一个测试图像进行分类需要和所有训练图像作比较,算法计算资源耗费高。
Nearest Neighbor分类器在某些特定情况(比如数据维度较低)下,可能是不错的选择。但是在实际的图像分类工作中,很少使用。
实际应用流程:
1) 预处理你的数据:对你数据中的特征进行归一化(normalize),让其具有零平均值(zeromean)和单位方差(unit variance)。
2) 如果数据是高维数据,考虑使用降维方法,比如PCA或随机投影。
3) 将数据随机分入训练集和验证集。按照一般规律,70%-90% 数据作为训练集。如果需要预测的超参数很多,那么就应该使用更大的验证集来有效地估计它们。如果担心验证集数量不够,那么就尝试交叉验证方法。
4) 在验证集上调优,尝试足够多的k值,尝试L1和L2两种范数计算方式。
5) 如果分类器跑得太慢,尝试使用Approximate Nearest Neighbor库(比如FLANN)来加速这个过程,其代价是降低一些准确率。
6) 对最优的超参数做记录。千万不要在最终的分类器中使用验证集数据,这样做会破坏对于最优参数的估计。直接使用测试集来测试用最优参数设置好的最优模型,得到测试集数据的分类准确率,并以此作为你的kNN分类器在该数据上的性能表现。
3. 验证集、交叉验证集和超参数调优
特别注意:决不能使用测试集来进行调优。测试数据集只使用一次,即在训练完成后评价最终的模型时使用。调优策略从训练集中取出一部分数据用来调优,我们称之为验证集(validation set)。把训练集分成训练集和验证集。使用验证集来对所有超参数调优。最后只在测试集上跑一次并报告结果。
交叉验证:

常用的数据分割模式。给出训练集和测试集后,训练集一般会被均分。这里是分成5份。前面4份用来训练,黄色那份用作验证集调优。如果采取交叉验证,那就各份轮流作为验证集。最后模型训练完毕,超参数都定好了,让模型跑一次(而且只跑一次)测试集,以此测试结果评价算法。
4. 线性分类器
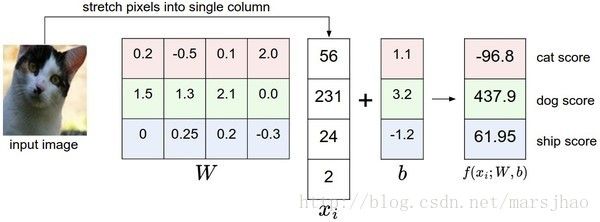
将图像看做高维度的点:既然图像被伸展成为了一个高维度的列向量,那么我们可以把图像看做这个高维度空间中的一个点(即每张图像是3072维空间中的一个点)。整个数据集就是一个点的集合,每个点都带有1个分类标签。
如下图,图像空间的示意图。其中每个图像是一个点,有3个分类器。以红色的汽车分类器为例,红线表示空间中汽车分类分数为0的点的集合,红色的箭头表示分值上升的方向。所有红线右边的点的分数值均为正,且线性升高。红线左边的点分值为负,且线性降低。

5. 损失函数
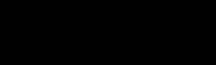
多类支持向量机损失Multiclass Support Vector Machine Loss
第i个数据中包含图像的像素和代表正确类别的标签。评分函数输入像素数据,然后通过公式![]() 来计算不同分类类别的分值。这里我们将分值简写为s。比如,针对第j个类别的得分就是第j个元素:
来计算不同分类类别的分值。这里我们将分值简写为s。比如,针对第j个类别的得分就是第j个元素:![]() 。针对第i个数据的多类SVM的损失函数定义如下:
。针对第i个数据的多类SVM的损失函数定义如下:
![]()
SVM的损失函数想要正确分类类别的分数比不正确类别分数高,而且至少要高。如果不满足这点,就开始计算损失值。
正则化(Regularization)
我们希望能向某些特定的权重W添加一些偏好,对其他权重则不添加,以此来消除模糊性。这一点是能够实现的,方法是向损失函数增加一个正则化惩罚(regularization penalty)R(W)部分。最常用的正则化惩罚是L2范式,L2范式通过对所有参数进行逐元素的平方惩罚来抑制大数值的权重:
![]()
包含正则化惩罚后,就能够给出完整的多类SVM损失函数了,它由两个部分组成:数据损失(data loss),即所有样例的的平均损失Li,以及正则化损失(regularization loss)。完整公式如下所示:
将其展开完整公式是:
![]()
Softmax分类器
交叉熵损失(cross-entropy loss)。公式如下:
![]() 或等价的
或等价的![]()
在上式中,使用fj来表示分类评分向量f中的第j个元素。
SVM和Softmax的比较
Softmax分类器为每个分类提供了“可能性”。 softmax分类器算出来的概率最好是看成一种对于分类正确性的自信。和SVM一样,数字间相互比较得出的大小顺序是可以解释的,但其绝对值则难以直观解释。softmax分类器对于分数是永远不会满意的:正确分类总能得到更高的可能性,错误分类总能得到更低的可能性,损失值总是能够更小。但是,SVM只要边界值被满足了就满意了,不会超过限制去细微地操作具体分数。这可以被看做是SVM的一种特性。
更多关注:MNIST在TensorFlow上的Softmax回归模型实现
6. 梯度下降
梯度下降是对神经网络的损失函数最优化中最常用的方法。
小批量数据梯度下降(Mini-batch gradient descent):在大规模的应用中(比如ILSVRC挑战赛),训练数据可以达到百万级量级。如果像这样计算整个训练集,来获得仅仅一个参数的更新就太浪费了。一个常用的方法是计算训练集中的小批量(batches)数据。
7. 梯度反向传播
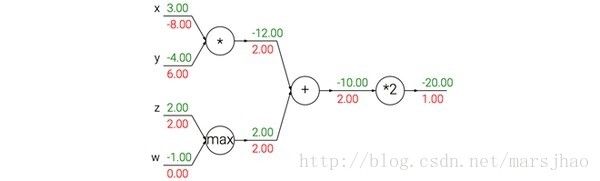
加法门单元把输出的梯度相等地分发给它所有的输入,这一行为与输入值在前向传播时的值无关。这是因为加法操作的局部梯度都是简单的+1,所以所有输入的梯度实际上就等于输出的梯度,因为乘以1.0保持不变。上例中,加法门把梯度2.00不变且相等地路由给了两个输入。
取最大值门单元对梯度做路由。和加法门不同,取最大值门将梯度转给其中一个输入,这个输入是在前向传播中值最大的那个输入。这是因为在取最大值门中,最高值的局部梯度是1.0,其余的是0。上例中,取最大值门将梯度2.00转给了z变量,因为z的值比w高,于是w的梯度保持为0。
乘法门单元相对不容易解释。它的局部梯度就是输入值,但是是相互交换之后的,然后根据链式法则乘以输出值的梯度。上例中,x的梯度是-4.00x2.00=-8.00。
8. 神经网络基本概念
一个两层的神经网络计算公式是![]()
非线性函数在神经网络的计算上是至关重要的,如果略去这一步,那么两个矩阵将会合二为一,对于分类的评分计算将重新变成关于输入的线性函数。
二分类Softmax分类器。举例来说,可以把![]() 看做其中一个分类的概率
看做其中一个分类的概率![]() ,其他分类的概率为
,其他分类的概率为![]() ,因为它们加起来必须为1。根据这种理解,可以得到交叉熵损失。然后将它最优化为二分类的Softmax分类器(也就是逻辑回归)。
,因为它们加起来必须为1。根据这种理解,可以得到交叉熵损失。然后将它最优化为二分类的Softmax分类器(也就是逻辑回归)。
二分类SVM分类器。或者可以在神经元的输出外增加一个最大边界折叶损失(max-margin hinge loss)函数,将其训练成一个二分类的支持向量机。
理解正则化。在SVM/Softmax的例子中,正则化损失从生物学角度可以看做逐渐遗忘,因为它的效果是让所有突触权重在参数更新过程中逐渐向着0变化。
9. 常用激活函数
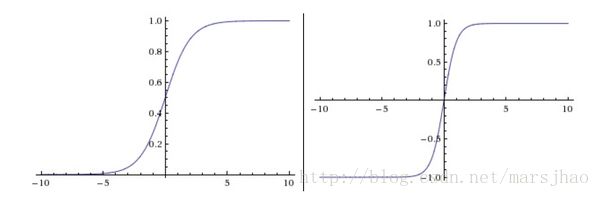
左边是Sigmoid非线性函数,将实数压缩到[0,1]之间。右边是tanh函数,将实数压缩到[-1,1]。
Sigmoid的两个主要缺点:Sigmoid函数饱和使梯度消失;Sigmoid函数的输出不是零中心的。
Tanh:![]() 。
。

左边是ReLU(校正线性单元:Rectified Linear Unit)激活函数,当x = 0时函数值为0。当x>0函数的斜率为1。右边图表指明使用ReLU比tanh收敛快6倍。
ReLU。在近些年ReLU变得非常流行。它的函数公式是![]() 。换句话说,这个激活函数就是一个关于0的阈值(如上图左侧)。使用ReLU有以下一些优缺点:
。换句话说,这个激活函数就是一个关于0的阈值(如上图左侧)。使用ReLU有以下一些优缺点:
优点1:相较于sigmoid和tanh函数,ReLU对于随机梯度下降的收敛有巨大的加速作用。这是由它的线性,非饱和的公式导致的。
优点2:sigmoid和tanh神经元含有指数运算等耗费计算资源的操作,而ReLU可以简单地通过对一个矩阵进行阈值计算得到。
缺点:在训练的时候,ReLU单元比较脆弱并且可能“死掉”。如果学习率设置得太高,可能会发现网络中40%的神经元都会死掉(在整个训练集中这些神经元都不会被激活)。通过合理设置学习率,这种情况的发生概率会降低。
Leaky ReLU。Leaky ReLU是为解决“ReLU死亡”问题的尝试。
![]()
Maxout。Maxout神经元就拥有ReLU单元的所有优点(线性操作和不饱和),而没有它的缺点(死亡的ReLU单元)。然而和ReLU对比,它每个神经元的参数数量增加了一倍,这就导致整体参数的数量激增。
最后需要注意一点:在同一个网络中混合使用不同类型的神经元是非常少见的,虽然没有什么根本性问题来禁止这样做。
一句话:用ReLU非线性函数。注意设置好学习率,或许可以监控你的网络中死亡的神经元占的比例。如果单元死亡问题困扰你,就试试Leaky ReLU或者Maxout,不要再用sigmoid了。也可以试试tanh,但是其效果应该不如ReLU或者Maxout。
10. 神经网络结构
最普通的层的类型是全连接层(fully-connected layer)。
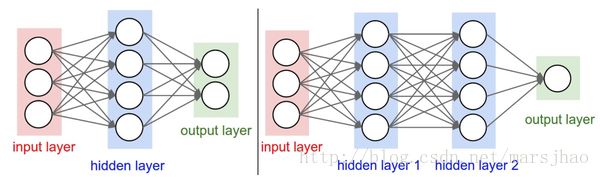
命名规则。当我们说N层神经网络的时候,我们没有把输入层算入。
前向传播。全连接层的前向传播一般就是先进行一个矩阵乘法,然后加上偏置并运用激活函数。
输出层。和神经网络中其他层不同,输出层的神经元一般是不会有激活函数的(或者也可以认为它们有一个线性相等的激活函数)。
卷积神经网络的情况却不同,在卷积神经网络中,对于一个良好的识别系统来说,深度是一个极端重要的因素。
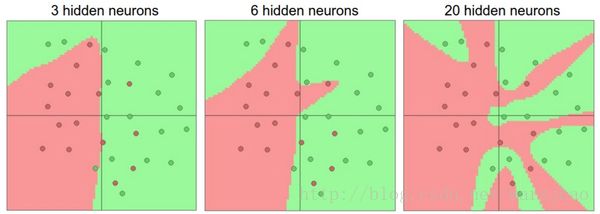
过拟合(Overfitting)是网络对数据中的噪声有很强的拟合能力而没有重视数据间(假设)的潜在基本关系。防止神经网络的过拟合有很多方法(L2正则化,dropout和输入噪音等)。
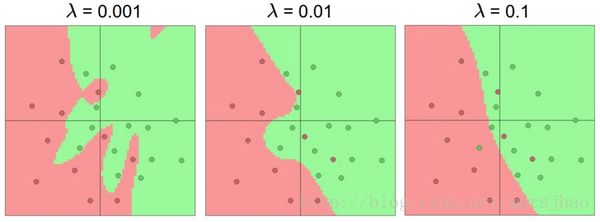
不应该因为害怕出现过拟合而使用小网络。相反,应该进尽可能使用大网络,然后使用正则化技巧来控制过拟合。