Detectron 保存faster rcnn 测试结果,类别 置信度 坐标
由于项目需要,要求获取每张图片中每个box的类别、置信度得分和bbox的坐标信息。
思路在inference阶段,每infer一张图片就新开一个txt文件,txt文件的每一行代表一个bbox得检测信息包括bbox的类别 置信度 和四个坐标值
需要修改两个文件
1,修改 detectron-master/detectron/utils/vis.py 文件
2,修改 detectron-master/tools/infer_simple.py 文件
对于detectron-master/detectron/utils/vis.py 文件主要修改vis_one_image()函数,添加了一个参数用于传入txt的文件名字。
另外新添加一个函数get_class_and_confidence用于获取类别和置信度,该函数放在get_class_string杉树下面 如下图:
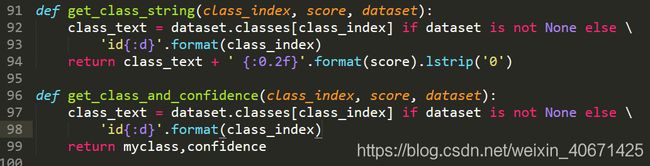
函数get_class_and_confidence在函数vis_one_image中调用获取类别和置信度得分,修改后的vis_one_image函数如下
def vis_one_image(
im, im_name, output_dir, boxes, segms=None, keypoints=None, thresh=0.9,
kp_thresh=2, dpi=200, box_alpha=0.0, dataset=None, show_class=False,
ext='pdf', out_when_no_box=False,tested_txt=None):
"""Visual debugging of detections."""
assert not (tested_txt==None),"please give the output full txt name"
print("save detect reselt in : %s",tested_txt)
save_to_txt = open(tested_txt,'w',encoding='utf-8')
if not os.path.exists(output_dir):
os.makedirs(output_dir)
if isinstance(boxes, list):
boxes, segms, keypoints, classes = convert_from_cls_format(
boxes, segms, keypoints)
if (boxes is None or boxes.shape[0] == 0 or max(boxes[:, 4]) < thresh) and not out_when_no_box:
return
dataset_keypoints, _ = keypoint_utils.get_keypoints()
if segms is not None and len(segms) > 0:
masks = mask_util.decode(segms)
color_list = colormap(rgb=True) / 255
kp_lines = kp_connections(dataset_keypoints)
cmap = plt.get_cmap('rainbow')
colors = [cmap(i) for i in np.linspace(0, 1, len(kp_lines) + 2)]
fig = plt.figure(frameon=False)
fig.set_size_inches(im.shape[1] / dpi, im.shape[0] / dpi)
ax = plt.Axes(fig, [0., 0., 1., 1.])
ax.axis('off')
fig.add_axes(ax)
ax.imshow(im)
if boxes is None:
sorted_inds = [] # avoid crash when 'boxes' is None
else:
# Display in largest to smallest order to reduce occlusion
areas = (boxes[:, 2] - boxes[:, 0]) * (boxes[:, 3] - boxes[:, 1])
sorted_inds = np.argsort(-areas)
mask_color_id = 0
for i in sorted_inds:
bbox = boxes[i, :4]
score = boxes[i, -1]
if score < thresh:
continue
# show box (off by default)
ax.add_patch(
plt.Rectangle((bbox[0], bbox[1]),
bbox[2] - bbox[0],
bbox[3] - bbox[1],
fill=False, edgecolor='g',
linewidth=0.5, alpha=box_alpha))
# print(classes[i],score,bbox)
mycls,confidence = get_class_and_confidence(classes[i], score, dataset)
write_linedata = "class:"+mycls+" "+"score:"+confidence+" "+"xmin:"+bbox[0]+" "+"ymin:"+bbox[1]+" "+"xmax:"+bbox[2]+" "+"ymax:"+bbox[3]
save_to_txt.write(write_linedata + '\n')
if show_class:
ax.text(
bbox[0], bbox[1] - 2,
get_class_string(classes[i], score, dataset),
fontsize=3,
family='serif',
bbox=dict(
facecolor='g', alpha=0.4, pad=0, edgecolor='none'),
color='white')
# show mask
if segms is not None and len(segms) > i:
img = np.ones(im.shape)
color_mask = color_list[mask_color_id % len(color_list), 0:3]
mask_color_id += 1
w_ratio = .4
for c in range(3):
color_mask[c] = color_mask[c] * (1 - w_ratio) + w_ratio
for c in range(3):
img[:, :, c] = color_mask[c]
e = masks[:, :, i]
_, contour, hier = cv2.findContours(
e.copy(), cv2.RETR_CCOMP, cv2.CHAIN_APPROX_NONE)
for c in contour:
polygon = Polygon(
c.reshape((-1, 2)),
fill=True, facecolor=color_mask,
edgecolor='w', linewidth=1.2,
alpha=0.5)
ax.add_patch(polygon)
# show keypoints
if keypoints is not None and len(keypoints) > i:
kps = keypoints[i]
plt.autoscale(False)
for l in range(len(kp_lines)):
i1 = kp_lines[l][0]
i2 = kp_lines[l][1]
if kps[2, i1] > kp_thresh and kps[2, i2] > kp_thresh:
x = [kps[0, i1], kps[0, i2]]
y = [kps[1, i1], kps[1, i2]]
line = plt.plot(x, y)
plt.setp(line, color=colors[l], linewidth=1.0, alpha=0.7)
if kps[2, i1] > kp_thresh:
plt.plot(
kps[0, i1], kps[1, i1], '.', color=colors[l],
markersize=3.0, alpha=0.7)
if kps[2, i2] > kp_thresh:
plt.plot(
kps[0, i2], kps[1, i2], '.', color=colors[l],
markersize=3.0, alpha=0.7)
# add mid shoulder / mid hip for better visualization
mid_shoulder = (
kps[:2, dataset_keypoints.index('right_shoulder')] +
kps[:2, dataset_keypoints.index('left_shoulder')]) / 2.0
sc_mid_shoulder = np.minimum(
kps[2, dataset_keypoints.index('right_shoulder')],
kps[2, dataset_keypoints.index('left_shoulder')])
mid_hip = (
kps[:2, dataset_keypoints.index('right_hip')] +
kps[:2, dataset_keypoints.index('left_hip')]) / 2.0
sc_mid_hip = np.minimum(
kps[2, dataset_keypoints.index('right_hip')],
kps[2, dataset_keypoints.index('left_hip')])
if (sc_mid_shoulder > kp_thresh and
kps[2, dataset_keypoints.index('nose')] > kp_thresh):
x = [mid_shoulder[0], kps[0, dataset_keypoints.index('nose')]]
y = [mid_shoulder[1], kps[1, dataset_keypoints.index('nose')]]
line = plt.plot(x, y)
plt.setp(
line, color=colors[len(kp_lines)], linewidth=1.0, alpha=0.7)
if sc_mid_shoulder > kp_thresh and sc_mid_hip > kp_thresh:
x = [mid_shoulder[0], mid_hip[0]]
y = [mid_shoulder[1], mid_hip[1]]
line = plt.plot(x, y)
plt.setp(
line, color=colors[len(kp_lines) + 1], linewidth=1.0,
alpha=0.7)
save_to_txt.close()
对于detectron-master/tools/infer_simple.py 文件,主要修改main函数,创建了一个文件夹(默认在detectron-master目录一下)output_txts用来存放每一张图片的txt。
修改后的main()函数
def main(args):
logger = logging.getLogger(__name__)
merge_cfg_from_file(args.cfg)
cfg.NUM_GPUS = 1
args.weights = cache_url(args.weights, cfg.DOWNLOAD_CACHE)
assert_and_infer_cfg(cache_urls=False)
assert not cfg.MODEL.RPN_ONLY, \
'RPN models are not supported'
assert not cfg.TEST.PRECOMPUTED_PROPOSALS, \
'Models that require precomputed proposals are not supported'
model = infer_engine.initialize_model_from_cfg(args.weights)
dummy_coco_dataset = dummy_datasets.get_coco_dataset()
if os.path.isdir(args.im_or_folder):
im_list = glob.iglob(args.im_or_folder + '/*.' + args.image_ext)
else:
im_list = [args.im_or_folder]
script_path = os.path.dirname(os.path.abspath(__file__))
txt_path = "{0}/../output_txts/".format(script_path)
if not os.path.exists():
os.makedirs(txt_path)
else:
print("path exists,it should be removed!!")
for i, im_name in enumerate(im_list):
out_name = os.path.join(
args.output_dir, '{}'.format(os.path.basename(im_name) + '.' + args.output_ext)
)
logger.info('Processing {} -> {}'.format(im_name, out_name))
im = cv2.imread(im_name)
timers = defaultdict(Timer)
t = time.time()
with c2_utils.NamedCudaScope(0):
cls_boxes, cls_segms, cls_keyps = infer_engine.im_detect_all(
model, im, None, timers=timers
)
print
logger.info('Inference time: {:.3f}s'.format(time.time() - t))
for k, v in timers.items():
logger.info(' | {}: {:.3f}s'.format(k, v.average_time))
if i == 0:
logger.info(
' \ Note: inference on the first image will be slower than the '
'rest (caches and auto-tuning need to warm up)'
)
#add save txt path
txt_name = im_name.split(".")[0] + '.txt'
save_txt_path = txt_path + txt_name
vis_utils.vis_one_image(
im[:, :, ::-1], # BGR -> RGB for visualization
im_name,
args.output_dir,
cls_boxes,
cls_segms,
cls_keyps,
dataset=dummy_coco_dataset,
box_alpha=0.3,
show_class=True,
thresh=args.thresh,
kp_thresh=args.kp_thresh,
ext=args.output_ext,
out_when_no_box=args.out_when_no_box,
tested_txt=save_txt_path
)