A*寻路算法之解决路径多拐点问题
1.问题描述
最近公司正在开发的游戏涉及到了寻路算法,然后我从网上找了一份A*算法代码,整理了一下写了一个A*算法基础实现。然而,在真正实用时A*寻路时,却发现了几个问题:
-
基础实现版的A*寻路算法在大地图的搜索上,耗时较长;
-
使用最小堆实现的OpenList来优化A*算法后,发现最后得到的路径往往是S型的;
然后策划看到效果后,提出了两点要求:1)寻路的路径中,拐点必须最少;2)存在多条路径时,必须优先走最快碰到拐点的路径。
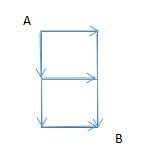
稍微解释一下上面的两个需求:假如出发点和目的点是"日"字型时,可经过上中下三条路径到达目的地。上下两条路径的拐点是1个,而中间路径的拐点是2个,淘汰中间路径。另外,上路走一步碰到拐点,而下路走两步碰到拐点,那么优先选择上路。
2. A*算法基本实现及优化
假设看这篇文章的朋友,都是已经了解A*算法的。如果还不了解A*算法,可以先百度一下,网上介绍A*算法的文章很多。
从网上找了一个A*算法的JAVA版实现,经过整理后实现如下:
public class AStar {
/** 地图 */
private GameMap map;
private ArrayList openList = new ArrayList<>();
private ArrayList closeList = new ArrayList<>();
public AStar(GameMap map) {
this.map = map;
}
public Node findPath(Node startNode, Node endNode) {
// 把起点加入 open list
openList.add(startNode);
while (openList.size() > 0) {
// 遍历 open list ,查找 F值最小的节点,把它作为当前要处理的节点
Node currNode = findMinFNodeInOpenList();
// 从open list中移除
openList.remove(currNode);
// 把这个节点移到 close list
closeList.add(currNode);
// 查找最小FCost的节点
ArrayList neighborNodes = findNeighborNodes(currNode);
for (Node nextNode : neighborNodes) {
int gCost = calcNodeCost(currNode, nextNode) + currNode.gCost;
if (exists(openList, nextNode)) {
// 如果新的路径fCost更小,更新nextNode节点
if (gCost < nextNode.gCost) {
nextNode.parent = currNode;
nextNode.gCost = gCost;
nextNode.fCost = nextNode.gCost + nextNode.hCost;
}
} else {
// 计算nextNode节点的fCost
nextNode.parent = currNode;
nextNode.gCost = gCost;
nextNode.hCost = calcNodeCost(nextNode, endNode);
nextNode.fCost = nextNode.gCost + nextNode.hCost;
openList.add(nextNode);
}
}
Node node = find(openList, endNode);
if (node != null) {
return node;
}
}
return find(openList, endNode);
}
public Node findMinFNodeInOpenList() {
Node tempNode = openList.get(0);
for (Node node : openList) {
if (node.fCost < tempNode.fCost) {
tempNode = node;
}
}
return tempNode;
}
public ArrayList findNeighborNodes(Node currentNode) {
ArrayList arrayList = new ArrayList();
addNode(arrayList, currentNode.x, currentNode.y - 1);
addNode(arrayList, currentNode.x, currentNode.y + 1);
addNode(arrayList, currentNode.x - 1, currentNode.y);
addNode(arrayList, currentNode.x + 1, currentNode.y);
return arrayList;
}
private void addNode(ArrayList arrayList, int x, int y) {
if (map.canReach(x, y) && !exists(closeList, x, y)) {
arrayList.add(new Node(x, y));
}
}
private int calcNodeCost(Node node1, Node node2) {
return abs(node2.x - node1.x) + abs(node2.y - node1.y);
}
public int abs(final int x) {
final int i = x >>> 31;
return (x ^ (~i + 1)) + i;
}
public static Node find(List nodes, Node point) {
for (Node n : nodes)
if ((n.x == point.x) && (n.y == point.y)) {
return n;
}
return null;
}
public static boolean exists(List nodes, Node node) {
for (Node n : nodes) {
if ((n.x == node.x) && (n.y == node.y)) {
return true;
}
}
return false;
}
public static boolean exists(List nodes, int x, int y) {
for (Node n : nodes) {
if ((n.x == x) && (n.y == y)) {
return true;
}
}
return false;
}
} 上面的代码实现了A*算法的逻辑,但是在200*200的地图上测试时,从(0,0)点走到(199,199)寻路一次通常要几秒到十几秒。
那么,我们先分析一下代码的性能为什么那么低。主要有两点:
1) findMinFNodeInOpenList() 方法需要遍历 open list ,查找 F值最小的节点,该方法的时间复杂度是O(n)。虽然该方法时间复杂度是线性的,但是每次检查一个节点时,都会执行一次该方法。
2) 添加新节点或者更新下一个节点时,都会调用一次exists()方法判断节点是否在openList或者closeList中。该方法同样是线性的,但是添加新节点或者更新下一个节点时,总会调用一次或多次,因此时间复杂度是m*O(n)。
针对上面两个痛点进行优化:首先,在一个队列中获取获取最大/最小的元素,我们通常首先想到的就是最大/小堆,因此,利用优先队列PriorityQueue实现openList,那么每次从openList中查找 最小F值的节点时,时间复杂度将降为O(lg n)。其次,分析上下文发现,closeList仅在添加节点到openList时做去重判断,而没有其他作用,那么可以通过数组标记或者Map存储遍历信息,使时间复杂度达到O(1)。以下是优化后的代码:
public class AStarOptimization {
/** 地图 */
private GameMap map;
private PriorityQueue newOpenList = new PriorityQueue<>(new Comparator() {
@Override
public int compare(Node o1, Node o2) {
return o1.fCost - o2.fCost;
}
});
private Set openSet = new HashSet<>();
private Set closeSet = new HashSet<>();
public AStarOptimization(GameMap map) {
this.map = map;
}
public List findPath() {
return findPath(map.getStartNode(), map.getEndNode());
}
public List findPath(Node startNode, Node endNode) {
newOpenList.add(startNode);
Node currNode = null;
while ((currNode = newOpenList.poll()) != null) {
removeKey(openSet, currNode.x, currNode.y);
addKey(closeSet, currNode.x, currNode.y);
ArrayList neighborNodes = findNeighborNodes(currNode);
for (Node nextNode : neighborNodes) {
int gCost = calcNodeCost(currNode, nextNode) + currNode.gCost;
if (contains(openSet, nextNode.x, nextNode.y)) {
if (gCost < nextNode.gCost) {
nextNode.parent = currNode;
nextNode.gCost = gCost;
nextNode.fCost = nextNode.gCost + nextNode.hCost;
}
} else {
nextNode.parent = currNode;
nextNode.gCost = gCost;
nextNode.hCost = calcNodeCost(nextNode, endNode);
nextNode.fCost = nextNode.gCost + nextNode.hCost;
newOpenList.add(nextNode);
addKey(openSet, nextNode.x, nextNode.y);
}
}
if (contains(openSet, endNode.x, endNode.y)) {
Node node = findOpenList(newOpenList, endNode);
return getPathList(node);
}
}
Node node = findOpenList(newOpenList, endNode);
return getPathList(node);
}
public ArrayList findNeighborNodes(Node currentNode) {
ArrayList arrayList = new ArrayList();
addNode(arrayList, currentNode.x, currentNode.y - 1);
addNode(arrayList, currentNode.x, currentNode.y + 1);
addNode(arrayList, currentNode.x - 1, currentNode.y);
addNode(arrayList, currentNode.x + 1, currentNode.y);
return arrayList;
}
private void addNode(ArrayList arrayList, int x, int y) {
if (map.canReach(x, y) && !contains(closeSet, x, y)) {
arrayList.add(new Node(x, y));
}
}
private int calcNodeCost(Node node1, Node node2) {
return abs(node2.x - node1.x) + abs(node2.y - node1.y);
}
private Node findOpenList(PriorityQueue nodes, Node point) {
for (Node n : nodes) {
if ((n.x == point.x) && (n.y == point.y)) {
return n;
}
}
return null;
}
public List getPathList(Node parent) {
List list = new ArrayList<>();
while (parent != null) {
list.add(new Node(parent.x, parent.y));
parent = parent.parent;
}
return list;
}
public int abs(final int x) {
final int i = x >>> 31;
return (x ^ (~i + 1)) + i;
}
private void addKey(Set set, int x, int y) {
set.add(getKey(x, y));
}
private void removeKey(Set set, int x, int y) {
set.remove(getKey(x, y));
}
private boolean contains(Set set, int x, int y) {
return set.contains(getKey(x, y));
}
private String getKey(int x, int y) {
StringBuilder sb = new StringBuilder();
sb.append(x).append('_').append(y);
return sb.toString();
}
} 优化后的代码在200*200的地图上测试,在障碍物比例为0.3时(200 * 200 * 0.3),从(0,0)点走到(199,199)寻路一次基本在30ms~50ms。
3. 多拐点问题
由于基于最小堆实现的优先队列是不稳定,在多个具有相同F值的节点中选择最小节点的顺序是无法保证的。因此,以上优化后的代码走出来的路径通常都是S型的,也就是存在拐点过多的问题。
是否使用基础版本的A*算法是否可以消除多拐点的问题呢?答案是否定的,基础版本的A*算法是按照一定的方向顺序添加节点,在相同F值时,获取节点也是按照相同方向顺序获取节点,这在空旷的地形中是不会出现S型路径。但是,当路径上有障碍物时,按照顺序添加节点然后按照顺序取节点的方法,就会出现走S型路径的问题。
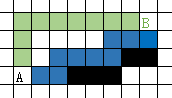
例如,如图所示情形,当从A点出发移动到B, A*算法按照上下左右的方向顺序添加节点,A从绿色路径移动到B;相反,如果从B移动到A点,A*算法会向下走到A点,但是沿途有障碍物,于是就形成了S型路径。
那么,基于最小堆实现的openList,如何杜绝路径多拐点呢?路径是算法执行过程中动态生成,生成或有路径去选择一条是不可能。最好的办法是,根据路径的特点调整路径上拐点的F值。
A*算法是利用启发函数:F(n) = G(n) + H(n),来确定每个点的F值,采用贪心策略选择F值最小的点作为下一个待更新节点,直到找到终点。其中G(n)表示从起始点走到该点的代价,H(n)估算从该点走到终点的代价。通常G(n)采用走到该点所用的步数来表示,而H(n)使用该点到终点的距离来表示。
从启发函数来看,A*算法对于路径的特点根本没有做任何要求,只要是最小F值的节点都可以加入路径当中。因此,我们可以在启发函数中加入对节点的路径特征的评判,使算法选择的最终结果符合我们的预期。基于此目的,修改启发函数:
F(n) = G(n) + H(n) + E(n)
其中E(n)表示加入该节点后,对路径的评分进行的微调。话不多说,先上代码:
public List findPath(Node startNode, Node endNode) {
newOpenList.add(startNode);
Node currNode = null;
while ((currNode = newOpenList.poll()) != null) {
removeKey(openSet, currNode.x, currNode.y);
addKey(closeSet, currNode.x, currNode.y);
ArrayList neighborNodes = findNeighborNodes(currNode);
for (Node nextNode : neighborNodes) {
// G + H + E
int gCost = 10 * calcNodeCost(currNode, nextNode) + currNode.gCost
+ calcNodeExtraCost(currNode, nextNode, endNode);
if (contains(openSet, nextNode.x, nextNode.y)) {
if (gCost < nextNode.gCost) {
nextNode.parent = currNode;
nextNode.gCost = gCost;
nextNode.fCost = nextNode.gCost + nextNode.hCost;
}
} else {
nextNode.parent = currNode;
nextNode.gCost = gCost;
nextNode.hCost = 10 * calcNodeCost(nextNode, endNode);
nextNode.fCost = nextNode.gCost + nextNode.hCost;
newOpenList.add(nextNode);
addKey(openSet, nextNode.x, nextNode.y);
}
}
if (contains(openSet, endNode.x, endNode.y)) {
Node node = findOpenList(newOpenList, endNode);
return getPathList(node);
}
}
Node node = findOpenList(newOpenList, endNode);
return getPathList(node);
}
private int calcNodeExtraCost(Node currNode, Node nextNode, Node endNode) {
// 第一个点或直线点
if (currNode.parent == null || nextNode.x == currNode.parent.x
|| nextNode.y == currNode.parent.y) {
return 0;
}
// 拐向终点的点
if (nextNode.x == endNode.x || nextNode.y == endNode.y) {
return 1;
}
// 普通拐点
return 2;
} 代码的终点是calcNodeExtraCost()方法,方法中判断如果nextNode和之前的节点是保持直线的,那么E值为0,否则如果是一个拐点的话,E值将大于0,并且这个E值会和G值存在一起,作为新的G值。
A*路径多拐点的问题暂时写到这里了,之后再补上后面的内容。