数据结构大作业2:三维运动轨迹的描述
本次实现的是一个三维运动轨迹的描述,我实现了匀速运动,匀加速运动。对于曲线运动,考虑到的情况是加速度和初速度方向不同的匀加速运动。
约束条件是运动轨迹不允许发生位置的突变,但速度和加速度可以突变,由自己自行分配。
在实现上,对于某一个运动段定义了一个Track类。而对于整个运动轨迹的操作,由LIst模板类派生了普通类Track_List。主要是由于约束条件的存在,需要更新后继结点,因此对某些函数进行了重载。
比起上一个大作业这个相对而言比较简单,主要是确定一个大的思路,之后就是在写的过程中逐渐改变自己的想法并且进行优化了。
比如这次对于存放采样数据的区域用哪种类型的就进行了多次尝试。
实现思路一:
首先我想使用上一章学的Vector模板,毕竟是一个封装好的容器。但是碰到的问题是使用Vector的话,我希望在一开始就对track进行初始化,但是不知道怎么调用构造函数。就是说,在一个A类中,有一个B类的对象b,我应该在什么时候调用构造函数。查询以后可采用先在私有成员中声明一个Vector类型的指针,之后在Track的构造函数中构造一个Vector类型的实例,再用拷贝构造函数将其赋给Track类中的Vector类型私有成员变量实现初始化。但是总觉得这样很复杂。
实现思路二:
声明一个XYZ类型结构体指针,动态分配一维数组存放,分配在构造函数中进行。这样确实比较方便,但是在后续的编写过程中,主要是每对列表进行一次修改,就需要更新后续所有结点的位置,这样的话每个动态分配的数组的大小都需要发生改变,需要先释放再重新分配内存。
实现思路三:
既然题目要求的是将数据采样后直接输出,那么我可以认为采样的数据无需保存在每一个结点中。因此我采用在输出到文件时,对每个结点临时分配一个数组,将采样数据临时存放,再输出到文件后直接释放。
List.h和listNode.h之前博客已经写过,此处略。
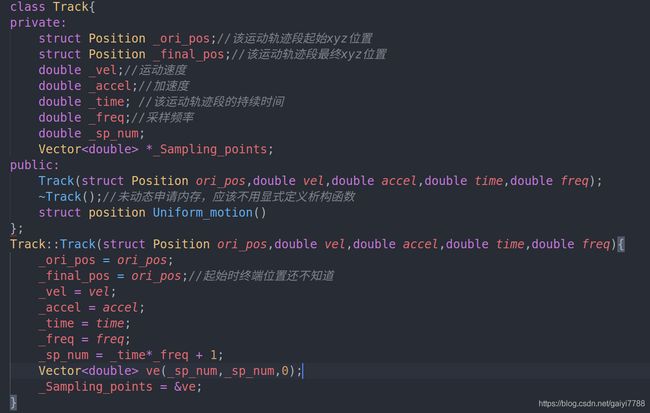
Track.h
//最多考虑到加速度带来的运动变化,即加速度的一阶导为0
#ifndef _TRACK_H_
#define _TRACK_H_
#include mian.cpp
#include "Track.h"
#include demo.m
通过matlab进行运动轨迹图像的绘制
clc;
A = load("Track_Data.txt");
B = load("All_Track_Data.txt");
xa=A(:,1);
ya=A(:,2);
za=A(:,3);
figure(1);
plot3(xa,ya,za);
grid on;
xlabel('x');
ylabel('y');
zlabel('z');
hold on;
xb=B(:,1);
yb=B(:,2);
zb=B(:,3);
figure(2);
plot3(xb,yb,zb);
grid on;
xlabel('x');
ylabel('y');
zlabel('z');
hold on;
运行效果
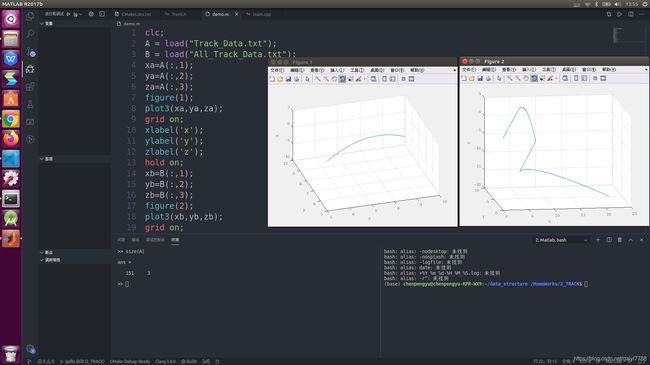
其实这还算不上c++和matlab混合编程,本来想编译.m文件为c++的库直接调用,但是gcc编译器版本不太对,因此就没有继续尝试。
参考:ubuntu下C++如何调用matlab程序
输出文件:
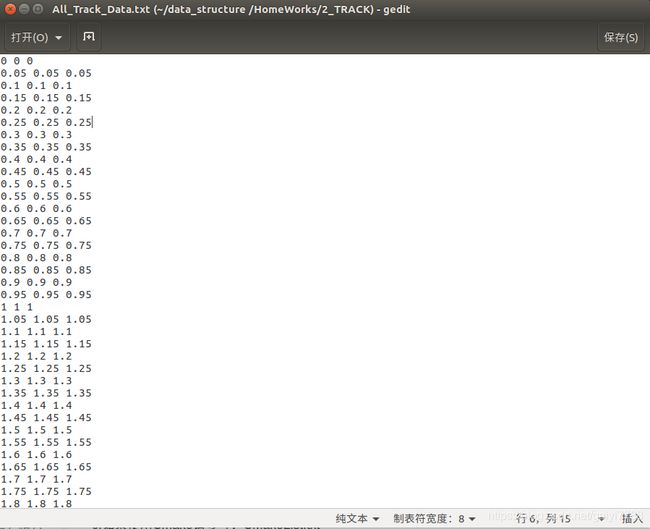
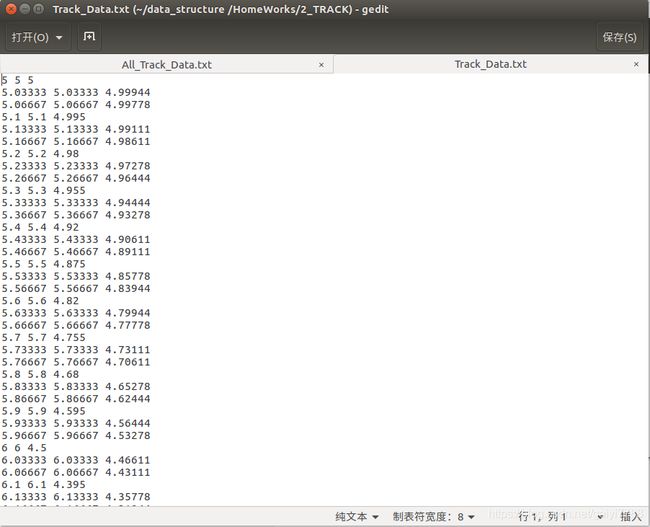
输出均为n×3的矩阵