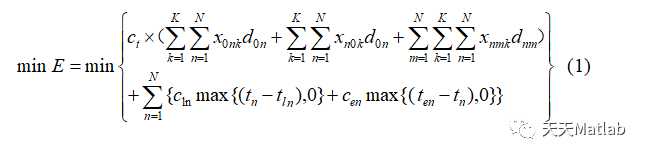
【优化求解】模拟退火遗传实现带时间窗的车辆路径规划问题
带时间窗的VRP问题描述:
假设在一个供求关系系统中,车辆从货源取货,配送到对应的若干配送点。车辆存在最大载货量,且配送可能有时间限制。需要合理安排取货时间,组织适当的行车路线,使用户需求得到满足,同时使某个代价函数最小,比如总工作时间最少、路径最短等。可以看出TSP问题是VRP问题的一种简单特殊形式。因此,VRP也是一种NP hard 问题。
目前解决此种问题的办法有多种,主要以启发式算法为主。包括退火算法、遗传算法、蚁群算法、禁忌算法等。
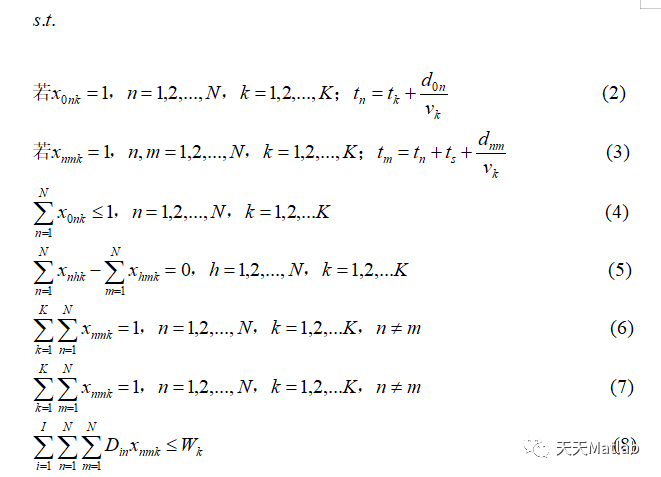
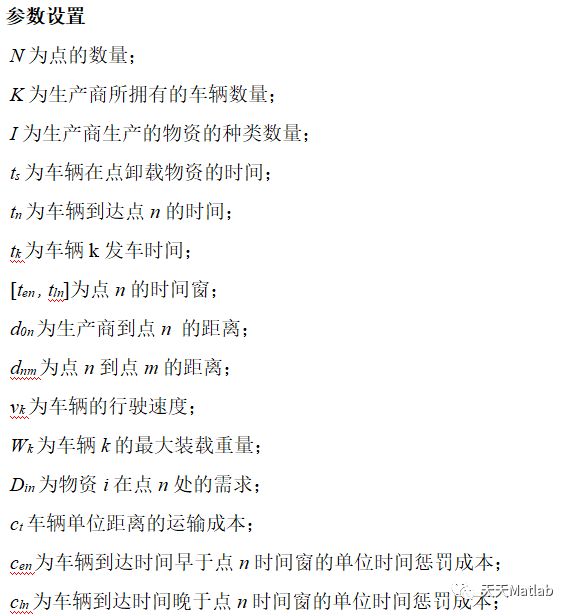
下面建立带时间窗的VRP模型:
clc;clear allclose allt0=cputime;%计时开始filename='.\Solomon\c101.txt';[NO,XCOORD, YCOORD,DEMAND,READY_TIME,DUE_DATE,SERVICE_TIME]=textread(filename,'%s%s%s%s%s%s%s','headerlines',8);%初始化timewindows=[str2num(char(READY_TIME))';str2num(char(DUE_DATE))'];coordinate=[str2num(char(XCOORD)),str2num(char(YCOORD))];demand=str2num(char(DEMAND))';service=str2num(char(SERVICE_TIME))';D=distanse(coordinate);popsize=80;%种群数量capacity = 200;%车子载重%经验公式m=[Σgi /aq]+1,粗求车辆数a = 0.8; %【3】k1 = round((sum(abs(demand))./(a*capacity)))-2; %最小车辆数k2 = round((sum(abs(demand))./(a*capacity)))+1; %最大车辆数% k1=size(NO);% k2=k1+10;original = 100;%初始每辆车的载货量C=500;%C为停止代数,遗传到第 C代时程序停止,C的具体取值视问题的规模和耗费的时间而定Pc=0.9;%交叉概率Pm=0.4;%变异概率% R = zeros(1,n+k);% tempR = zeros(1,n+k);minvalue = 1000000;%随便设置的最优值,不能太小for k = k1:1:k2 %每种车辆数做一次寻优[tempR,tempvalue] = Run_VRP(D,demand,popsize,timewindows,k,capacity,original,C,Pc,Pm,service);%运算返回最优路径R和其总距离Rlengthif min(tempvalue) < minvalueminvalue = min(tempvalue);%如果小于最小适应度值,替代&& min(tempvalue)>100R = tempR;%保存最小路径minvehicle = k;%保存最小车辆数量shiyingdu=tempvalue ;%保存最小染色体endenddisp(['最优染色体',num2str(R)]);disp(['最小车辆数',num2str(minvehicle)]);disp(['最小里程数',num2str(minvalue)]);figure(1)sz=100;% scatter(coordinate(:,1),coordinate(:,2),50);%客户位置hold on[n,nn] = size(D);%节点个数for i=2:nplot(coordinate(i,1),coordinate(i,2),'ro','MarkerSize',5,'MarkerEdgeColor','k','MarkerFaceColor','b');text(coordinate(i,1)-0.001,coordinate(i,2)+0.005,[num2str(i-1)],'Fontsize',10);hold onendhold onplot(coordinate(1,1),coordinate(1,2),'p','MarkerSize',30,'MarkerEdgeColor','k','MarkerFaceColor','y');hold on%发货中心ss=0;cost=zeros(k,1);for j=1:length(R)-1if R(j)==0ss=ss+1;endswitch sscase 1line([coordinate(R(j)+1,1),coordinate(R(j+1)+1,1)],[coordinate(R(j)+1,2),coordinate(R(j+1)+1,2)]);hold on%%画出车辆1的路程case 2line([coordinate(R(j)+1,1),coordinate(R(j+1)+1,1)],[coordinate(R(j)+1,2),coordinate(R(j+1)+1,2)],'Color','r');hold on%%画出车辆2的路程case 3line([coordinate(R(j)+1,1),coordinate(R(j+1)+1,1)],[coordinate(R(j)+1,2),coordinate(R(j+1)+1,2)],'Color','g');hold on %%画出车辆3的路程case 4line([coordinate(R(j)+1,1),coordinate(R(j+1)+1,1)],[coordinate(R(j)+1,2),coordinate(R(j+1)+1,2)],'Color','k');hold on %%画出车辆3的路程line([coordinate(R(j)+1,1),coordinate(R(j+1)+1,1)],[coordinate(R(j)+1,2),coordinate(R(j+1)+1,2)],'Color','y');hold on %%画出车辆3的路程case 6line([coordinate(R(j)+1,1),coordinate(R(j+1)+1,1)],[coordinate(R(j)+1,2),coordinate(R(j+1)+1,2)],'Color','m');hold on %%画出车辆3的路程case 7line([coordinate(R(j)+1,1),coordinate(R(j+1)+1,1)],[coordinate(R(j)+1,2),coordinate(R(j+1)+1,2)],'Color',[1 0.6 0.3]);hold on %%画出车辆3的路程case 8line([coordinate(R(j)+1,1),coordinate(R(j+1)+1,1)],[coordinate(R(j)+1,2),coordinate(R(j+1)+1,2)],'Color',[0.5 0.5 0.5]);hold on %%画出车辆3的路程case 9line([coordinate(R(j)+1,1),coordinate(R(j+1)+1,1)],[coordinate(R(j)+1,2),coordinate(R(j+1)+1,2)],'Color',[0.6 0.4 0.7]);hold on %%画出车辆3的路程case 10line([coordinate(R(j)+1,1),coordinate(R(j+1)+1,1)],[coordinate(R(j)+1,2),coordinate(R(j+1)+1,2)],'Color',[0.8 0.4 0.7]);hold on %%画出车辆3的路程case 11line([coordinate(R(j)+1,1),coordinate(R(j+1)+1,1)],[coordinate(R(j)+1,2),coordinate(R(j+1)+1,2)],'Color',[0.6 0.6 0.7]);hold on %%画出车辆3的路程case 12line([coordinate(R(j)+1,1),coordinate(R(j+1)+1,1)],[coordinate(R(j)+1,2),coordinate(R(j+1)+1,2)],'Color',[0.6 0.4 0.7]);hold on %%画出车辆3的路程otherwiseline([coordinate(R(j)+1,1),coordinate(R(j+1)+1,1)],[coordinate(R(j)+1,2),coordinate(R(j+1)+1,2)],'Color','c');hold on %%画出车辆4的路程endendminvalue1=sum(cost);title(['车辆数',num2str(minvehicle)]);xlabel('横坐标');ylabel('纵坐标')figure(2)plot(1:C-1,shiyingdu,'b-');xlabel('迭代次数');ylabel('适应度');
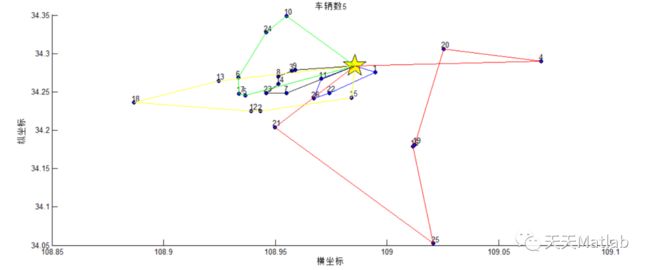
最优染色体0 1 22 26 11 0 21 25 16 19 20 4 0 5 17 6 24 10 0 9 3 8 14 23 7 0 13 18 12 2 15 0最小车辆数5最小里程数377.3607
往期回顾>>>>>>
基于栅格地图——遗传算法的机器人最优路径规划
【模式识别】Matlab指纹识别
【基础教程】matlab绘制疫情地图
matlab自动识别银行卡号
【优化问题】遗传算法求最值
无参考图像质量评价之基于多特征的增强图像质量评价

完整源码加qq1575304183