转载:https://blog.csdn.net/tigerda/article/details/61192943
各种边缘检测算子
常见边缘检测算子:Roberts 、Sobel 、Prewitt、Laplacian、Log/Marr、Canny、Kirsch、Nevitia
一阶微分算子:Roberts 、Sobel 、Prewitt
Sobel算子是典型的基于一阶导数的边缘检测算子,由于该算子中引入了类似局部平均的运算,因此对噪声具有平滑作用,能很好的消除噪声的影响。
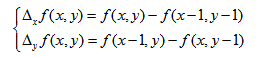
Roberts算子是一种利用局部差分算子寻找边缘的算子,它采用对角线方向相邻两象素之差近似梯度幅值检测边缘。没有经过图像平滑处理的,因此图像噪声一般得不到很好的抑制。Roberts 算子对具有陡峭的低噪声图像的定位精度较高。
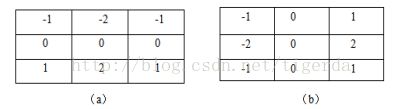
Prewitt算子是一种一阶微分算子的边缘检测,利用像素点上下、左右邻点的灰度差,在边缘处达到极值检测边缘,去掉部分伪边缘,对噪声具有平滑作用 。其原理是在图像空间利用两个方向模板与图像进行邻域卷积来完成的,这两个方向模板一个检测水平边缘,一个检测垂直边缘。
我们看这三种边缘检测算子模板及写成差分的形式

Roberts算子

Sobel算子


Prewitt算子
图 1 一阶微分算子
如何计算边缘幅值与方向?以Sobel算子为例。3*3 Sobel两个方向的算子在图像上滑动,模板与其覆盖的图像3*3区域9个像素进行卷积,求和后得到此方向的边缘检测幅值。
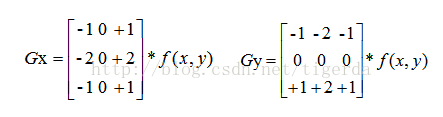


f(x,y)为图像,Gx和Gy分别是水平和竖直方向算子的卷积结果,G则是最终得到的边缘幅值,θ值则是边缘方向。当然G的计算有时简化为
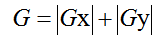
或者

求幅值时是有多种选择的,一般根据具体应用选择用水平还是竖直或是两个方向同时检测。
另外,需要说明的是,Sobel算子还有一种变种,是各向同性Sobel算子,其模板为


图 2 各向同性Sobel算子
Sobel各向同性算子的权值比普通Sobel算子的权值更准确。为什么?模板的权值是离中心位置越远则权值(看绝对值)影响越小,如上图,把模板看成是9个小正方形,小正方形边长为1,则虚线三角形的斜边长为 ,下直角边长为1,则如果(0,0)位置权值绝对值大小为1,则按照距离关系,位置(1,0)处的权值绝对值大小应该为才是准确的。
,下直角边长为1,则如果(0,0)位置权值绝对值大小为1,则按照距离关系,位置(1,0)处的权值绝对值大小应该为才是准确的。
二阶微分算子:Laplacian、Log/Marr
拉普拉斯算子来自拉普拉斯变换,Laplace算子是一种各向同性算子,二阶微分算子,在只关心边缘的位置而不考虑其周围的象素灰度差值时比较合适。Laplace算子对孤立象素的响应要比对边缘或线的响应要更强烈,因此只适用于无噪声图象。存在噪声情况下,使用Laplacian算子检测边缘之前需要先进行低通滤波。所以,通常的分割算法都是把Laplacian算子和平滑算子结合起来生成一个新的模板。
而Log算子又称Marr算子,这两种算子模板如下:
Laplacian算子(两种模板)

Log算子
图 3 二阶微分算子
拉普拉斯算子数学公式是

写成差分形式为

Log边缘检测则是先进行高斯滤波再进行拉普拉斯算子检测,然后找过零点来确定边缘位置,很多时候我们只是知道Log 5*5模板如上图所示,但是具体是怎么得到的?下面进行推导。
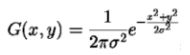
二维高斯公式是
按拉普拉斯算子公式求x,y方向的二阶偏导后为

这里x,y不能看成模板位置,应看成是模板其他位置到中心位置的距离。那么写成

这里x0,y0就是模板中心位置,x,y是模板其他位置,对于5*5模板,则x0=2,y0 = 2,那对于模板中(0,0)位置的权值,即把x= 0,y= 0,x0= 2,y0 = 2带入上式,另 = 1,得到约等于0.0175,这样得到
= 1,得到约等于0.0175,这样得到

通过取整变符号,且模板总和为0,得到图6所示的模板。
另外,这里模板大小是如何取的?通常高斯分布中,在(-3,3)的范围内就覆盖了绝大部分区域,所以模板大小一般取dim = 1 + 6(在SIFT特征中,其中的高斯模糊也是这样取),dim如果为小数,则取不小于dim的最小整数,当然实际使用时没有这么严格,如上面我们取=1时,模板大小取5*5。那同一个尺寸的模板中的权值调整就是的变化得到的,变化到一定程度,模板尺寸大小改变(这个是个人理解)。
非微分边缘检测算子:Canny
Canny边缘检测大家应该很熟悉,这里列出步骤,并给出一个详细介绍的链接Canny算子。
1. 彩色图像转换为灰度图像
2. 对图像进行高斯模糊
3. 计算图像梯度,根据梯度计算图像边缘幅值与角度(这里其实用到了微分边缘检测算子来计算梯度幅值方向)
4. 非最大信号压制处理(边缘细化)
5. 双阈值边缘连接处理
6. 二值化图像输出结果
方向算子Kirsch(8个3*3模板),Nevitia (12个5*5模板)
这两个算子是利用多个方向的子模板进行分别计算,最后取幅值最大的那个为最终边缘幅值,方向即最大幅值对应的那个方向
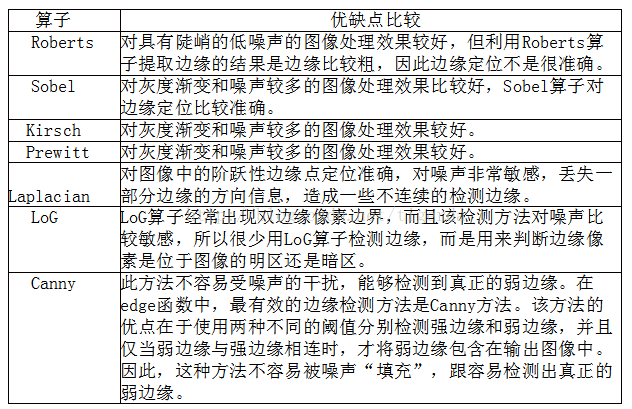
五、各边缘检测算子对比