Maze环境以及DQN的实现
环境
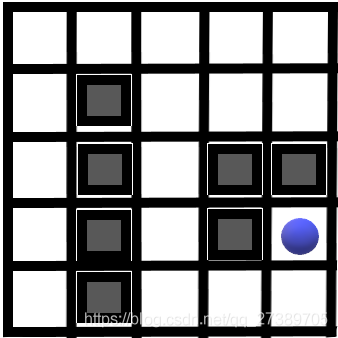
5*5的迷宫,其中(4,3)位置是出口,障碍物的位置分别为(1,1)、(1,2)、(1,3)、(1,4)、(3,2)、(3,3)、(4,2)
动作空间当然4个,上下左右
直接上代码~
import gym
import tensorflow as tf
import numpy as np
import time
import sys
if sys.version_info.major == 2:
import Tkinter as tk
else:
import tkinter as tk
class Maze(tk.Tk, object):
def __init__(self,state_x,state_y,frequency):
super(Maze, self).__init__()
self.action = [0, 1, 2, 3]
self.n_actions = len(self.action)
self.n_features = 2
self.state_min_x = 0
self.state_max_x = 4
self.state_min_y = 0
self.state_max_y = 4
self.frequency = frequency
self.block = np.zeros((self.state_max_x+1, self.state_max_y+1))
self.block[1][1] = 1
self.block[1][2] = 1
self.block[1][3] = 1
self.block[1][4] = 1
self.block[3][2] = 1
self.block[3][3] = 1
self.block[4][2] = 1
self.state_x=state_x
self.state_y=state_y
# 出口
self.out_x = 4
self.out_y = 3
def reset(self):
self.update()
self.state_x = np.random.randint(self.state_min_x, self.state_max_x)
self.state_y = np.random.randint(self.state_min_y, self.state_max_y)
if self.block[self.state_x][self.state_y] == 1:
self.reset()
if self.frequency !=0:
print("reset"+str(self.frequency))
self.frequency = 0
return np.array([self.state_x, self.state_y])
def step(self, action):
judge = 1
self.frequency+=1
if action == 0: # up
if self.state_y < self.state_max_y and self.block[self.state_x][self.state_y+1] == 0:
self.state_y += 1
else:
self.state_y = self.state_y
judge = 0
elif action == 1: # down
if self.state_y > self.state_min_y and self.block[self.state_x][self.state_y-1] == 0:
self.state_y -= 1
else:
self.state_y = self.state_y
judge = 0
elif action == 2: # right
if self.state_x < self.state_max_x and self.block[self.state_x+1][self.state_y] == 0:
self.state_x += 1
else:
self.state_x = self.state_x
judge = 0
elif action == 3: # left
if self.state_x > self.state_min_x and self.block[self.state_x-1][self.state_y] == 0:
self.state_x -= 1
else:
self.state_x = self.state_x
judge = 0
if judge == 0:
return np.array([self.state_x, self.state_y]), -1, self.is_done()
return np.array([self.state_x, self.state_y]), self.get_reward(), self.is_done()
def render(self):
return 0
def is_done(self):
if self.state_x == self.out_x and self.state_y == self.out_y:
print("finish")
return True
return False
def get_reward(self):
if self.state_x == self.out_x and self.state_y == self.out_y:
return 1
return 0
其中回馈值设置的好像有问题,收敛会很慢,但是逻辑应该不存在问题。
其中DQN的实现直接拷贝了Github上的代码
DQN_modified.py和RL_brain.py
执行的代码如下
from RL_brain import DeepQNetwork
from env_maze import Maze
def work():
step = 0
for _ in range(1000):
# initial observation
observation = env.reset()
while True:
# fresh env
env.render()
# RL choose action based on observation
action = RL.choose_action(observation)
# RL take action and get next observation and reward
observation_, reward, done = env.step(action)
RL.store_transition(observation, action, reward, observation_)
if (step > 200) and (step % 5 == 0):
RL.learn()
# swap observation
observation = observation_
# break while loop when end of this episode
if done:
break
step += 1
# end of game
print('game over')
env.destroy()
if __name__ == '__main__':
#导入Maze环境
env = Maze(0,0,0)
RL = DeepQNetwork(env.n_actions, env.n_features,
learning_rate=0.01,
reward_decay=0.9,
e_greedy=0.9,
replace_target_iter=200,
memory_size=2000,
# output_graph=True
)
env.after(100, work)
env.mainloop()
因为还不知道什么评价指标,所以我直接用frequency(到达终点尝试的次数)做了评价指标,速度简直慢的吓人
第一次到达终点用了 168次尝试,第二次直接用了224659次…天
finish
reset168
finish
reset224659
…
于是,我改了一下get_reward函数,相当于在最后这条路线上提前设置好。
def get_reward(self):
if self.state_x == self.out_x and self.state_y == self.out_y:
return 1
elif self.state_x == 4 and self.state_y == 4:
return 0.9
elif self.state_x == 3 and self.state_y == 4:
return 0.8
elif self.state_x == 2 and self.state_y == 4:
return 0.7
elif self.state_x == 2 and self.state_y == 3:
return 0.6
elif self.state_x == 2 and self.state_y == 2:
return 0.5
elif self.state_x == 2 and self.state_y == 1:
return 0.4
return 0
训练3000次后基本上10次左右就可以找到路线了,- -有点耍流氓,不过至少证明我这个实验没问题,就是收敛的有点慢
接着,如果刚开始的回馈值有问题呢?比如
def get_reward(self):
if self.state_x == self.out_x and self.state_y == self.out_y:
return 1
elif self.state_x == 4 and self.state_y == 4:
return 0.8
elif self.state_x == 3 and self.state_y == 4:
return 0.6
elif self.state_x == 2 and self.state_y == 4:
return 0.4
elif self.state_x == 2 and self.state_y == 3:
return 0.7
elif self.state_x == 2 and self.state_y == 2:
return 0.3
elif self.state_x == 2 and self.state_y == 1:
return 0.4
return 0
结果还是可以收敛,emmm 还是老老实实的学下基础内容吧