基于SLAM融合构图的自主轮式仓储货运机器人技术说明
基于SLAM融合构图的自主轮式仓储货运机器人技术说明
本文为基于SLAM融合构图的自主轮式仓储货运机器人技术说明文档,旨在说明基于SLAM融合构图的自主轮式仓储货运机器人环境依赖与操作配置。操作演示请参考演示PPT&视频。项目计划请参考项目计划书/基于SLAM融合构图的自主轮式仓储货运机器人-项目计划书
- 基于SLAM融合构图的自主轮式仓储货运机器人技术说明
- 环境说明
- 1 硬件基础
- 2 操作系统环境
- 3 软件依赖
- 环境配置
- 1 安装与配置 ROS
- 11 安装 ROS
- 111 添加 sourcelist
- 112 添加 keys
- 113 安装
- 114 初始化 rosdep
- 115 环境配置
- 12 创建ROS工作空间
- 121 创建catkin_ws
- 122 编译catkin_ws
- 123 配置catkin_ws环境
- 124 catkin_ws说明
- 11 安装 ROS
- 2 安装与配置 serial
- 21 安装serial
- 22 从源码安装
- 3 安装与配置 rplidar
- 31 rplidar包下载
- 32 编译
- 4 安装与配置 navigation
- 41 下载源码
- 42 编译源码
- 5 安装与配置 hector_slam
- 51 安装hector_slam
- 52 从源码安装
- 6 下载与编译作品源码
- 61 下载作品源码
- 62 编译作品源码
- 63 在Qt中查看源码结构
- 1 安装与配置 ROS
- 参数配置
- 1 amcl定位器参数
- 2 局部规划器参数
- 操作演示
- 1 启动轮式机器人
- 2 启动地图构建
- 3 启动自主导航
1 环境说明
1.1 硬件基础
正方形或圆形双轮机器人
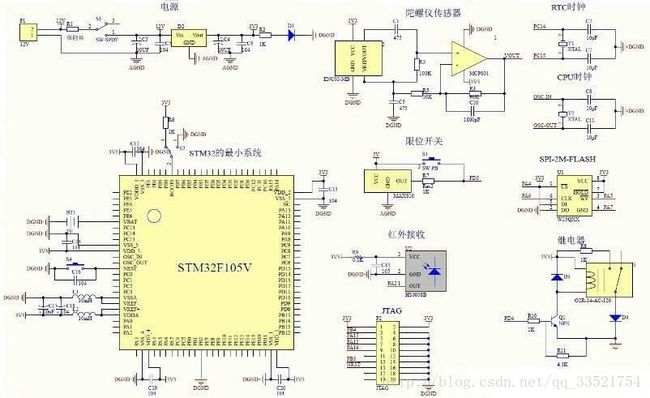
STM 32 控制模块
RPLIDAR A2 激光雷达

1.2 操作系统环境
Ubuntu 14.04
ROS Indigo
1.3 软件依赖
| 软件功能包名称 | 软件功能包功能 |
|---|---|
| rplidar | 激光雷达驱动,数据采集 |
| serial | 串口通讯 |
| navigation | 基础导航功能 |
| hector_slam | 基础SLAM构图功能 |
2 环境配置
2.1 安装与配置 ROS
安装ROS具体教程参见ROS安装中文教程
2.1.1 安装 ROS
2.1.1.1 添加 source.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'2.1.1.2 添加 keys
sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA1162.1.1.3 安装
sudo apt-get update
sudo apt-get install ros-indigo-desktop-full2.1.1.4 初始化 rosdep
sudo rosdep init
rosdep update2.1.1.5 环境配置
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
source ~/.bashrc2.1.2 创建ROS工作空间
2.1.2.1 创建catkin_ws
mkdir -p ~/catkin_ws/src2.1.2.2 编译catkin_ws
cd ~/catkin_ws/
catkin_make2.1.2.3 配置catkin_ws环境
source devel/setup.bash2.1.2.4 catkin_ws说明
本次提交作品中项目源码/src文件夹即为机器人上位机上catkin_ws/src文件夹。
2.2 安装与配置 serial
2.2.1 安装serial
因为本次开发没有修改serial相关代码,故可以用命令行安装
sudo apt-get install ros-indigo-serial2.2.2 从源码安装
当然也可以从源码安装
cd ~/catkin_ws/src
git clone https://github.com/wjwwood/serial.git
cd ~/catkin_ws
catkin_make2.3 安装与配置 rplidar
2.3.1 rplidar包下载
cd ~/catkin_ws/src
git clone https://github.com/robopeak/rplidar_ros2.3.2 编译
cd ~/catkin_ws
catkin_make2.4 安装与配置 navigation
2.4.1 下载源码
本次开发直接调用了navigation工具包中的类,故必须从源码中安装
git clone https://github.com/ros-planning/navigation.git2.4.2 编译源码
cd ~/catkin_ws
catkin_make 2.5 安装与配置 hector_slam
2.5.1 安装hector_slam
因为本次开发没有修改serial相关代码,故可以用命令行安装
sudo apt-get install ros-indigo-hector-slam2.5.2 从源码安装
当然也可以从源码安装
cd ~/catkin_ws/src
git clone https://tu-darmstadt-ros-pkg/hector_slam
cd ~/catkin_ws
catkin_make2.6 下载与编译作品源码
2.6.1 下载作品源码
http://42.123.127.88/Robobase/SLAMRoboCar.git
cd ~/SLAMRoboCar/程序源码/
cp -r -f src ~/catkin_ws/src2.6.2 编译作品源码
cd ~/catkin_ws
catkin_make 2.6.3 在Qt中查看源码结构
bash -i -c <PATH TO YOUR QtCreator>3 参数配置
使用本作品源码时,需对不同机器人配置以下参数
3.1 amcl定位器参数
"amcl" type="amcl" name="amcl" output="screen">
-- Publish scans from best pose at a max of 10 Hz -->
//全部滤波器参数
<param name="min_particles" value="500"/> //允许的粒子数量的最小值,默认100
<param name="max_particles" value="5000"/> //允许的例子数量的最大值,默认5000
<param name="kld_err" value="0.05"/> //真实分布和估计分布之间的最大误差,默认0.01
<param name="kld_z" value="0.99"/> //上标准分位数(1-p),其中p是估计分布上误差小于kld_err的概率,默认0.99
<param name="update_min_d" value="0.2"/> //在执行滤波更新前平移运动的距离,默认0.2m
<param name="update_min_a" value="0.5"/> //执行滤波更新前旋转的角度,默认pi/6 rad
<param name="resample_interval" value="1"/> //在重采样前需要的滤波更新的次数,默认2
<param name="transform_tolerance" value="0.1"/> //tf变换发布推迟的时间,为了说明tf变换在未来时间内是可用的
<param name="recovery_alpha_slow" value="0.0"/> //慢速的平均权重滤波的指数衰减频率,用作决定什么时候通过增加随机位姿来recover,默认0(disable),可能0.001是一个不错的值
<param name="recovery_alpha_fast" value="0.0"/> //快速的平均权重滤波的指数衰减频率,用作决定什么时候通过增加随机位姿来recover,默认0(disable),可能0.1是个不错的值
<param name="gui_publish_rate" value="10.0"/> //扫描和路径发布到可视化软件的最大频率,设置参数为-1.0意为失能此功能,默认-1.0
<param name="save_pose_rate" value="0.5"/> //存储上一次估计的位姿和协方差到参数服务器的最大速率。被保存的位姿将会用在连续的运动上来初始化滤波器。-1.0失能。
<param name="use_map_topic" value="false"/> //当设置为true时,AMCL将会订阅map话题,而不是调用服务返回地图。也就是说,当设置为true时,有另外一个节点实时的发布map话题,也就是机器人在实时的进行地图构建,并供给amcl话题使用;当设置为false时,通过map server,也就是调用已经构建完成的地图。在navigation 1.4.2中新加入的参数。
<param name="first_map_only" value="false"/> //当设置为true时,AMCL将仅仅使用订阅的第一个地图,而不是每次接收到新的时更新为一个新的地图,在navigation 1.4.2中新加入的参数。
//激光模型参数
<param name="laser_min_range" value="-1.0"/> //被考虑的最小扫描范围;参数设置为-1.0时,将会使用激光上报的最小扫描范围
<param name="laser_max_range" value="-1.0"/> //被考虑的最大扫描范围;参数设置为-1.0时,将会使用激光上报的最大扫描范围
<param name="laser_max_beams" value="30"/> //更新滤波器时,每次扫描中多少个等间距的光束被使用
<param name="laser_z_hit" value="0.5"/> //模型的z_hit部分的最大权值,默认0.95
<param name="laser_z_short" value="0.05"/> //模型的z_short部分的最大权值,默认0.1
<param name="laser_z_max" value="0.05"/> //模型的z_max部分的最大权值,默认0.05
<param name="laser_z_rand" value="0.5"/> //模型的z_rand部分的最大权值,默认0.05
<param name="laser_sigma_hit" value="0.2"/> //被用在模型的z_hit部分的高斯模型的标准差,默认0.2m
<param name="laser_lambda_short" value="0.1"/> //模型z_short部分的指数衰减参数,默认0.1
<param name="laser_likehood_max_dist" value="2.0"/> //地图上做障碍物膨胀的最大距离,用作likehood_field模型
<param name="laser_model_type" value="likelihood_field"/> //模型使用,可以是beam, likehood_field, likehood_field_prob(和likehood_field一样但是融合了beamskip特征),默认是“likehood_field”
//里程计模型参数
<param name="odom_model_type" value="diff"/> //模型使用,可以是"diff", "omni", "diff-corrected", "omni-corrected",后面两 个是对老版本里程计模型的矫正,相应的里程计参数需要做一定的减小
<param name="odom_alpha1" value="0.2"/> //指定由机器人运动部分的旋转分量估计的里程计旋转的期望噪声,默认0.2
<param name="odom_alpha2" value="0.2"/> //制定由机器人运动部分的平移分量估计的里程计旋转的期望噪声,默认0.2
-- translation std dev, m -->
<param name="odom_alpha3" value="0.8"/> //指定由机器人运动部分的平移分量估计的里程计平移的期望噪声,默认0.2
<param name="odom_alpha4" value="0.2"/> //指定由机器人运动部分的旋转分量估计的里程计平移的期望噪声,默认0.2
<param name="odom_alpha5" value="0.1"/> //平移相关的噪声参数(仅用于模型是“omni”的情况)
<param name="odom_frame_id" value="odom"/> //里程计默认使用的坐标系
<param name="base_frame_id" value="base_link"/> //用作机器人的基坐标系
<param name="global_frame_id" value="map"/> //由定位系统发布的坐标系名称
<param name="tf_broadcast" value="true"/> //设置为false阻止amcl发布全局坐标系和里程计坐标系之间的tf变换
//机器人初始化数据设置
<param name="initial_pose_x" value="0.0"/> //初始位姿均值(x),用于初始化高斯分布滤波器。
<param name="initial_pose_y" value="0.0"/> //初始位姿均值(y),用于初始化高斯分布滤波器。
<param name="initial_pose_a" value="0.0"/> //初始位姿均值(yaw),用于初始化高斯分布滤波器。
<param name="initial_cov_xx" value="0.5*0.5"/> //初始位姿协方差(x*x),用于初始化高斯分布滤波器。
<param name="initial_cov_yy" value="0.5*0.5"/> //初始位姿协方差(y*y),用于初始化高斯分布滤波器。
<param name="initial_cov_aa" value="(π/12)*(π/12)"/> //初始位姿协方差(yaw*yaw),用于初始化高斯分布滤波器。
3.2 局部规划器参数
#设置加速度
acc_lim_th: 0.3
acc_lim_x: 1.25
acc_lim_y: 1.25
#设置速度
max_vel_x: 0.15
min_vel_x: -0.15
max_trans_vel: 0.2 #abs
min_trans_vel: 0.1
max_vel_y: 0.0
min_vel_y: 0.0
max_rot_vel: 0.2 #abs
min_rot_vel: 0
holonomic_robot: false
#设置目标容错性,包括距离和角度
xy_goal_tolerance: 0.15
yaw_goal_tolerance: 0.1
latch_xy_goal_tolerance: true ##锁电脑 原本为false
#设置仿真时间、样本数等参数
sim_time: 4.0
sim_granularity: 0.025
vx_samples: 10
vy_samples: 1
vtheta_samples: 20
controller_frequency: 4
#设置对路径评分的参数
goal_distance_bias: 32.0
path_distance_bias: 24.0
occdist_scale: 0.1
forward_point_distance: 0.325
stop_time_buffer: 0.2
start scaling: 0.25 #unknown
max_scaling_factor: 0.2 #unknown
oscillation_reset_dist: 0.05
#设置是否使用dwa
dwa: true
prune_plan: true
4 操作演示
4.1 启动轮式机器人
roscore
roslaunch xhr_nav_pakge summer_car_start.launch4.2 启动地图构建
roslaunch rplidar_ros hector_rplidar.launch启动构图时的消息节点结构

4.3 启动自主导航
roslaunch xhr_nav_pakge summer_car_start.launch
roslaunch xhr_nav_pakge nav_start.launch启动自主导航时的消息节点结构

自主导航初始化

自主导航规划路径

具体操作演示参考演示PPT&视频