Pytorch实例----CAFAR10数据集分类(VGG)
在上一篇 Pytorch实例----CAFAR10数据集分类(AlexNet)的识别统计,本篇主要调整Net()类,设计VGG网络(+BN)后的识别统计(其他设计注释同上)。
VGG与AlexNet在CAFAR10数据集的统计结果对比图
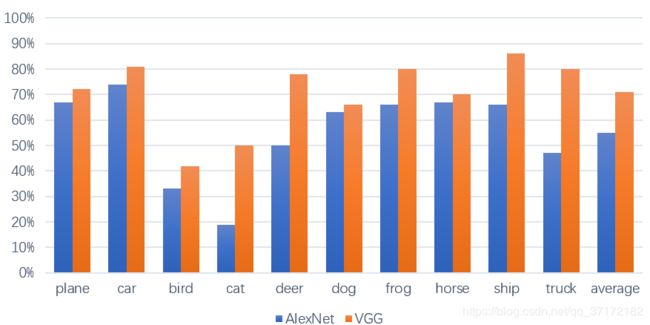
可以看到,对于之前cat(19%), bird(33%), truck(47%)有显著提高:cat(50%), bird(42%), truck(80%), 最高识别的类别为:ship(86%), car(81%), frog(80%), turck(80%), 由原来55%的平均识别率提升为71%,各类的识别显著提升。此时的VGG网络仅为VGG11,通过使用VGG16, VGG19有望进一步提升准确率。
VGG网络结构编程实现:
#define the network
cfg = {
'VGG11':[64, 'M', 128, 'M', 256, 'M', 512, 'M', 512, 'M'],
'VGG13':[64, 64, 'M', 128, 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'VGG16':[64, 64, 64, 'M', 128, 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M', 512, 512, 512, 'M'],
}
class Net(nn.Module):
def __init__(self, vgg_name):
super(Net, self).__init__()
self.features = self._make_layer(cfg[vgg_name])
self.classifer = nn.Linear(512, 10)
def forward(self, x):
out = self.features(x)
out = out.view(out.size(0), -1)
out = self.classifer(out)
return out
def _make_layer(self, cfg):
layers = []
in_channels = 3
for x in cfg:
if x == 'M':
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
else:
layers += [
nn.Conv2d(in_channels, x, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(x),
nn.ReLU(True)
]
in_channels = x
return nn.Sequential(*layers)
net = Net('VGG11')整体代码实现:
import torch
import torchvision
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torch.autograd import Variable
import torchvision.transforms as transforms
from torchvision import models
import matplotlib.pyplot as plt
import numpy as np
def imshow(img):
img = img / 2 + 0.5
np_img = img.numpy()
plt.imshow(np.transpose(np_img, (1, 2, 0)))
#define transform
#hint: Normalize(mean, var) to normalize RGB
transform = transforms.Compose([transforms.ToTensor(), transforms.Normalize((0.5, 0.5, 0.5),(0.5, 0.5, 0.5))])
#define trainloader
trainset = torchvision.datasets.CIFAR10(root='./data', train=True, download=False, transform=transform)
trainloader = torch.utils.data.DataLoader(trainset, batch_size=4, shuffle=True, num_workers=2)
#define testloader
testset = torchvision.datasets.CIFAR10(root='./data', train=False, download=False, transform=transform)
testloader = torch.utils.data.DataLoader(testset, batch_size=4, shuffle=True, num_workers=2)
#define class
classes = ('plane', 'car', 'bird', 'cat', 'deer', 'dog', 'frog', 'horse', 'ship', 'truck')
#define the network
cfg = {
'VGG11':[64, 'M', 128, 'M', 256, 'M', 512, 'M', 512, 'M'],
'VGG13':[64, 64, 'M', 128, 128, 'M', 256, 256, 'M', 512, 512, 'M', 512, 512, 'M'],
'VGG16':[64, 64, 64, 'M', 128, 128, 128, 'M', 256, 256, 256, 'M', 512, 512, 512, 'M', 512, 512, 512, 'M'],
}
class Net(nn.Module):
def __init__(self, vgg_name):
super(Net, self).__init__()
self.features = self._make_layer(cfg[vgg_name])
self.classifer = nn.Linear(512, 10)
def forward(self, x):
out = self.features(x)
out = out.view(out.size(0), -1)
out = self.classifer(out)
return out
def _make_layer(self, cfg):
layers = []
in_channels = 3
for x in cfg:
if x == 'M':
layers += [nn.MaxPool2d(kernel_size=2, stride=2)]
else:
layers += [
nn.Conv2d(in_channels, x, kernel_size=3, padding=1, bias=False),
nn.BatchNorm2d(x),
nn.ReLU(True)
]
in_channels = x
return nn.Sequential(*layers)
net = Net('VGG11')
if torch.cuda.is_available():
net.cuda()
print(net)
#define loss
cost = nn.CrossEntropyLoss()
#define optimizer
optimizer = optim.SGD(net.parameters(), lr=0.001, momentum=0.9)
print('start')
#iteration for training
for epoch in range(2):
running_loss = 0.0
for i, data in enumerate(trainloader, 0):
inputs, labels = data
inputs, labels = Variable(inputs.cuda()), Variable(labels.cuda())
optimizer.zero_grad()
outputs = net(inputs)
loss = cost(outputs, labels)
loss.backward()
optimizer.step()
#print loss result
running_loss += loss.item()
if i % 2000 == 1999:
print('[%d, %5d] loss: %.3f'%(epoch + 1, i + 1, running_loss / 2000))
running_loss = 0.001
print('done')
#get random image and label
dataiter = iter(testloader)
images, labels = dataiter.next()
imshow(torchvision.utils.make_grid(images))
print('groundTruth: ', ''.join('%6s' %classes[labels[j]] for j in range(4)))
#get the predict result
outputs = net(Variable(images.cuda()))
_, pred = torch.max(outputs.data, 1)
print('prediction: ', ''.join('%6s' %classes[labels[j]] for j in range(4)))
#test the whole result
correct = 0.0
total = 0
for data in testloader:
images, labels = data
outputs = net(Variable(images.cuda()))
_, pred = torch.max(outputs.data, 1)
total += labels.size(0)
correct += (pred == labels.cuda()).sum()
print('average Accuracy: %d %%' %(100*correct / total))
#list each class prediction
class_correct = list(0. for i in range(10))
class_total = list(0. for i in range(10))
for data in testloader:
images, labels = data
outputs = net(Variable(images.cuda()))
_, pred = torch.max(outputs.data, 1)
c = (pred == labels.cuda()).squeeze()
for i in range(4):
label = labels[i]
class_correct[label] += float(c[i])
class_total[label] += 1
print('each class accuracy: \n')
for i in range(10):
print('Accuracy: %6s %2d %%' %(classes[i], 100 * class_correct[i] / class_total[i]))
实验结果:

practice makes perfect !
github source code: https://github.com/GinkgoX/CAFAR10_Classification_Task/blob/master/CAFAR10_VGG.ipynb