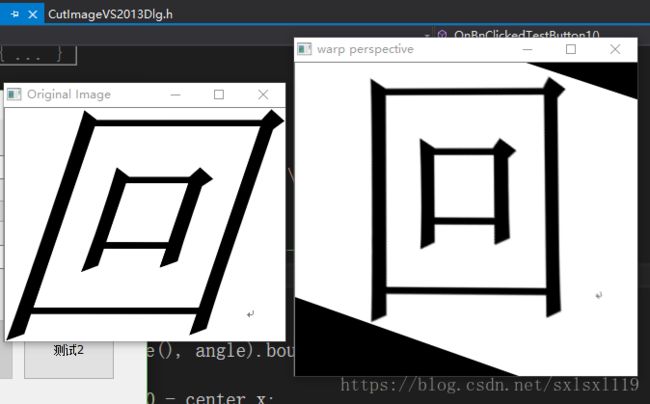
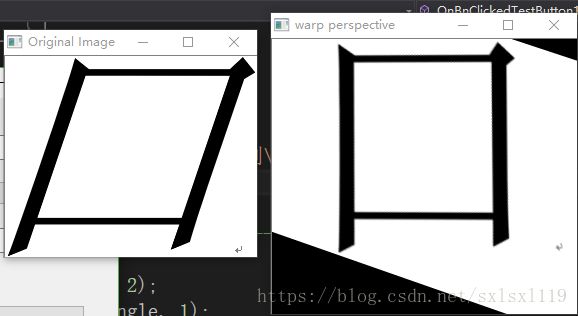
OpenCV利用透视变换将斜体校正
cv::Mat src = cv::imread("D:\\sxl\\处理图片\\斜体分割\\测试图\\正2.png");
if (!src.data)
return;
//--------------旋转------------------------------------------------------
double angle = 19;
Point2f center(src.cols / 2, src.rows / 2);
Mat rot = getRotationMatrix2D(center, angle, 1);
Rect bbox = RotatedRect(center, src.size(), angle).boundingRect();
rot.at(0, 2) += bbox.width / 2.0 - center.x;
rot.at(1, 2) += bbox.height / 2.0 - center.y;
//设置选择背景边界颜色:绿色
Scalar borderColor = Scalar(255, 255, 255);
Mat dst;
warpAffine(src, dst, rot, bbox.size(), INTER_LINEAR, BORDER_CONSTANT, borderColor);
Mat gray, BinImg;
if (dst.channels() == 3)
{
cvtColor(dst, gray, CV_BGR2GRAY); //转换成灰度图
}
else
{
gray = dst;
}
//--------------旋转------------------------------------------------------
vector not_a_rect_shape;
not_a_rect_shape.push_back(Point(3, 82));
not_a_rect_shape.push_back(Point(2, 276));
not_a_rect_shape.push_back(Point(234, 191));
not_a_rect_shape.push_back(Point(239, 1));
// For debugging purposes, draw green lines connecting those points
// and save it on disk
const Point* point = ¬_a_rect_shape[0];
int n = (int)not_a_rect_shape.size();
Mat draw = gray.clone();
polylines(draw, &point, &n, 1, true, Scalar(0, 255, 0), 3, CV_AA);
imwrite("draw.jpg", draw);
// topLeft, topRight, bottomRight, bottomLeft
cv::Point2f src_vertices[4];
src_vertices[0] = not_a_rect_shape[0];
src_vertices[1] = not_a_rect_shape[1];
src_vertices[2] = not_a_rect_shape[2];
src_vertices[3] = not_a_rect_shape[3];
Point2f dst_vertices[4];
dst_vertices[0] = Point(2, 2);
dst_vertices[1] = Point(0, 194);
dst_vertices[2] = Point(235, 190);
dst_vertices[3] = Point(239, 1);
Mat warpMatrix = getPerspectiveTransform(src_vertices, dst_vertices);
cv::Mat rotated;
warpPerspective(gray, rotated, warpMatrix, rotated.size(), INTER_LINEAR, BORDER_CONSTANT);
// Display the image
cv::namedWindow("Original Image");
cv::imshow("Original Image", src);
cv::namedWindow("warp perspective");
cv::imshow("warp perspective", rotated);
imwrite("result.jpg", src);
cv::waitKey();
return ;
效果图:

欢迎扫码关注我的微信公众号
