OpenCV:特征点检测与图像匹配
特征点又称兴趣点、关键点,它是在图像中突出且具有代表意义的一些点,通过这些点我们可以用来识别图像、进行图像配准、进行3D重建等。本文主要介绍OpenCV中几种定位与表示关键点的函数。
一、Harris角点
角点是图像中最基本的一种关键点,它是由图像中一些几何结构的关节点构成,很多都是线条之间产生的交点。Harris角点是一类比较经典的角点类型,它的基本原理是计算图像中每点与周围点变化率的平均值。
![]() (1)
(1)
![]() (2)
(2)
其中I(x+u,y+u)代表了点(x,y)邻域点的灰度值。通过变换可以将上式变化为一个协方差矩阵求特征值的问题(2),具体数学原理本文不过多描述。
OpenCV的Hairrs角点检测的函数为cornerHairrs(),但是它的输出是一幅浮点值图像,浮点值越高,表明越可能是特征角点,我们需要对图像进行阈值化。我们使用一张建筑图像来显示:
|
1
2
3
4
5
6
7
8
9
10
11
|
int
main()
{
Mat image=imread(
"../buliding.png"
);
Mat gray;
cvtColor(image,gray,CV_BGR2GRAY);
Mat cornerStrength;
cornerHarris(gray,cornerStrength,3,3,0.01);
threshold(cornerStrength,cornerStrength,0.001,255,THRESH_BINARY);
return
0;
}
|


首先我们来说明一下cornerHairrs()这个函数参数的意思:
前2参数是输入与输出,输入是一个灰度图像,输出是一个浮点图像,第三个参数指定角点分析的邻域,第4个参数实际上在角点求取过程中计算梯度图像的核窗口大小,第5个参数是它原理公式(2)中的一个系数。
从上面的例子的结果我们可以看到,有很多角点都是粘连在一起的,我们下面通过加入非极大值抑制来进一步去除一些粘在一起的角点。
非极大值抑制原理是,在一个窗口内,如果有多个角点则用值最大的那个角点,其他的角点都删除,窗口大小这里我们用3*3,程序中通过图像的膨胀运算来达到检测极大值的目的,因为默认参数的膨胀运算就是用窗口内的最大值替代当前的灰度值。程序的最后使用了一个画角点的函数将角点显示在图像中,这个函数与本系列第5篇中画角点的函数是一致的。
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
|
int
main()
{
Mat image=imread(
"../buliding.png"
);
Mat gray;
cvtColor(image,gray,CV_BGR2GRAY);
Mat cornerStrength;
cornerHarris(gray,cornerStrength,3,3,0.01);
double
maxStrength;
double
minStrength;
// 找到图像中的最大、最小值
minMaxLoc(cornerStrength,&minStrength,&maxStrength);
Mat dilated;
Mat locaMax;
// 膨胀图像,最找出图像中全部的局部最大值点
dilate(cornerStrength,dilated,Mat());
// compare是一个逻辑比较函数,返回两幅图像中对应点相同的二值图像
compare(cornerStrength,dilated,locaMax,CMP_EQ);
Mat cornerMap;
double
qualityLevel=0.01;
double
th=qualityLevel*maxStrength;
// 阈值计算
threshold(cornerStrength,cornerMap,th,255,THRESH_BINARY);
cornerMap.convertTo(cornerMap,CV_8U);
// 逐点的位运算
bitwise_and(cornerMap,locaMax,cornerMap);
drawCornerOnImage(image,cornerMap);
namedWindow(
"result"
);
imshow(
"result"
,image);
waitKey();
return
0;
}
void
drawCornerOnImage(Mat& image,
const
Mat&binary)
{
Mat_
Mat_
for
(
int
i=0;it!=itd;it++,i++)
{
if
(*it)
circle(image,Point(i%image.cols,i/image.cols),3,Scalar(0,255,0),1);
}
}
|
现在我们得到的效果就比默认的函数得到的结果有相当的改善。

由于cornerHarris的一些缺点,OpenCV提供了另一个相似的函数GoodFeaturesToTrack()它用角点间的距离限制来防止角点粘连在一起。
|
1
2
3
4
|
goodFeaturesToTrack(image,corner,
500,
// 最多检测到的角点数
0.01,
// 阈值系数
10);
// 角点间的最小距离
|
它可以得到与上面基本一致的结果。
二、FAST特征点
harris特征在算法复杂性上比较高,在大的复杂的目标识别或匹配应用上效率不能满足要求,OpenCV提供了一个快速检测角点的类FastFeatureDetector,而实际上FAST并不是快的意思,而是Features from Accelerated Segment Test,但这个算法效率确实比较高,下面我们来看看这个类的用法。
OpenCV里为角点检测提供了统一的接口,通过类下面的detect方法来检测对应的角点,而输出格式都是vector
|
1
2
3
4
5
6
7
|
vector
FastFeatureDetector fast(
// 定义检测类
40);
//40是检测的阈值
fast.detect(image,keypoints);
drawKeypoints(image,keypoints,image,Scalar(255,0,0),
DrawMatchesFlags::DRAW_OVER_OUTIMG);
|
其中drawKeypoints是OpenCV提供的在图像上画角点的函数。它的参数可以让我们选择用不同的方式标记出特征点。
三、尺度不变的SURF特征
surf特征是类似于SIFT特征的一种尺度不变的特征点,它的优点在于比SIFT效率要高,在实际运算中可以达到实时性的要求,关于SURF的原理这里就不过多的介绍,网络上这类的文章很多。
类似于FAST特征点的求法,SURF也可以使用通用接口求得,而SURF特征的类为SurfFeatureDetector,类似的SIFT特征点的检测类为SiftFeatureDetector。
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
|
#include
#include
#include
using
namespace
cv;
int
main()
{
Mat image=imread(
"../buliding.png"
);
vector
SurfFeatureDetector surf(2500.);
surf.detect(image,keypoints);
drawKeypoints(image,keypoints,image,Scalar(255,0,0),
DrawMatchesFlags::DRAW_RICH_KEYPOINTS);
namedWindow(
"result"
);
imshow(
"result"
,image);
waitKey();
return
0;
}
|
这里有一个值得说明的问题是:OpenCV2.4版本后好像把SurfFeatureDetector这个类的定义移到了头文件nonfree/features2d.hpp
中,所以头文件中要加入该文件,并且要把opencv_nonfree24xd.lib加入属性表的链接器熟悉的输入中,其中x换成你当前opencv的版本号。
最终的显示效果如下:

四、SURF特征的描述
在图像配准中,特征点的描述往往不是位置这么简单,而是使用了一个N维向量来描述一个特征点,这些描述子之间可以通过定义距离公式来比较相近程度。
SurfDescriptorExtractor 是一个提取SURF特征点以及其描述的类。
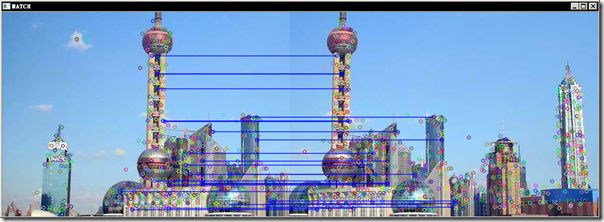
下面是一个宽景图像的拼接配准的例子:


|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
|
#
include
#
include
#
include
#
include
using
namespace
cv;
int
main()
{
Mat image1=imread(
"../b1.png"
);
Mat image2=imread(
"../b2.png"
);
// 检测surf特征点
vector
SurfFeatureDetector detector(
400
);
detector.detect(image1, keypoints1);
detector.detect(image2, keypoints2);
// 描述surf特征点
SurfDescriptorExtractor surfDesc;
Mat descriptros1,descriptros2;
surfDesc.compute(image1,keypoints1,descriptros1);
surfDesc.compute(image2,keypoints2,descriptros2);
// 计算匹配点数
BruteForceMatcher
vector
matcher.match(descriptros1,descriptros2,matches);
std::nth_element(matches.begin(),matches.begin()+
24
,matches.end());
matches.erase(matches.begin()+
25
,matches.end());
// 画出匹配图
Mat imageMatches;
drawMatches(image1,keypoints1,image2,keypoints2,matches,
imageMatches,Scalar(
255
,
0
,
0
));
namedWindow(
"image2"
);
imshow(
"image2"
,image2);
waitKey();
return
0
;
}
|
程序中我们选择了25个配准点,得到最后的匹配如下:
----------------------------------------------------------------------------------------------------------------------------------------------
原文出处:http://www.cnblogs.com/tornadomeet/archive/2012/08/17/2644903.html
特征点检测学习_2(surf算法)
在上篇博客特征点检测学习_1(sift算法) 中简单介绍了经典的sift算法,sift算法比较稳定,检测到的特征点也比较多,其最大的确定是计算复杂度较高。后面有不少学者对其进行了改进,其中比较出名的就是本文要介绍的surf算法,surf的中文意思为快速鲁棒特征。本文不是专门介绍surf所有理论(最好的理论是作者的论文)的,只是对surf算法进行了下整理,方便以后查阅。
网上有些文章对surf做了介绍,比如:
http://wuzizhang.blog.163.com/blog/static/78001208201138102648854/
surf算法原理,有一些简单介绍.
http://blog.csdn.net/andkobe/article/details/5778739
对surf的某些细节做了通俗易懂的解释.
http://www.owlei.com/DancingWind/
这篇文章名字叫做《surf原文翻译》,写得非常好,看完会对surf中采用的一些技术更加深入的理解,不过本文却不是翻译英文的,而是该作者自己的理解,对积分图,Hessian矩阵等引入的原因都做了通俗的解释,推荐一看。
一、Surf描述子形成步骤
1. 构造高斯金字塔尺度空间
其实surf构造的金字塔图像与sift有很大不同,就是因为这些不同才加快了其检测的速度。Sift采用的是DOG图像,而surf采用的是Hessian矩阵行列式近似值图像。首先来看看图像中某个像素点的Hessian矩阵,如下:
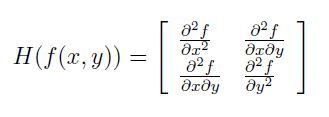
即每一个像素点都可以求出一个Hessian矩阵。但是由于我们的特征点需要具备尺度无关性,所以在进行Hessian矩阵构造前,需要对其进行高斯滤波。这样,经过滤波后在进行Hessian的计算,其公式如下:
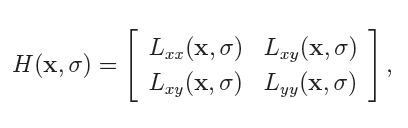
公式中的符号,估计有点数学基础的朋友都能够猜到,这里就不多解释了。
最终我们要的是原图像的一个变换图像,因为我们要在这个变换图像上寻找特征点,然后将其位置反映射到原图中,例如在sift中,我们是在原图的DOG图上寻找特征点的。那么在surf中,这个变换图是什么呢?从surf的众多资料来看,就是原图每个像素的Hessian矩阵行列式的近似值构成的。其行列式近似公式如下:
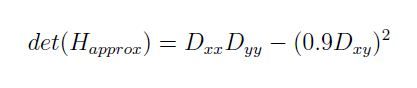
其中0.9是作者给出的一个经验值,其实它是有一套理论计算的,具体去看surf的英文论文。
由于求Hessian时要先高斯平滑,然后求二阶导数,这在离散的像素点是用模板卷积形成的,这2中操作合在一起用一个模板代替就可以了,比如说y方向上的模板如下:
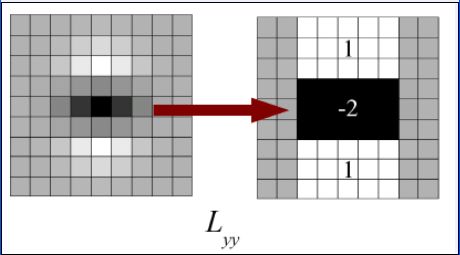
该图的左边即用高斯平滑然后在y方向上求二阶导数的模板,为了加快运算用了近似处理,其处理结果如右图所示,这样就简化了很多。并且右图可以采用积分图来运算,大大的加快了速度,关于积分图的介绍,可以去查阅相关的资料。
同理,x和y方向的二阶混合偏导模板如下所示:

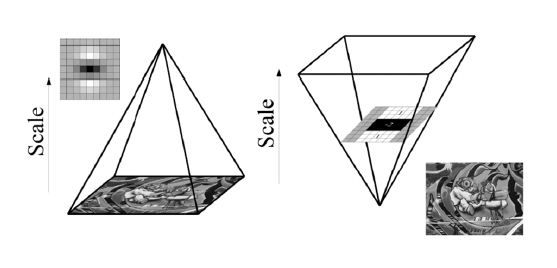
上面讲的这么多只是得到了一张近似hessian行列式图,这例比sift中的DOG图,但是在金字塔图像中分为很多层,每一层叫做一个octave,每一个octave中又有几张尺度不同的图片。在sift算法中,同一个octave层中的图片尺寸(即大小)相同,但是尺度(即模糊程度)不同,而不同的octave层中的图片尺寸大小也不相同,因为它是由上一层图片降采样得到的。在进行高斯模糊时,sift的高斯模板大小是始终不变的,只是在不同的octave之间改变图片的大小。而在surf中,图片的大小是一直不变的,不同的octave层得到的待检测图片是改变高斯模糊尺寸大小得到的,当然了,同一个octave中个的图片用到的高斯模板尺度也不同。Surf采用这种方法节省了降采样过程,其处理速度自然也就提上去了。其金字塔图像如下所示:
2. 利用非极大值抑制初步确定特征点
此步骤和sift类似,将经过hessian矩阵处理过的每个像素点与其3维领域的26个点进行大小比较,如果它是这26个点中的最大值或者最小值,则保留下来,当做初步的特征点。
3. 精确定位极值点
这里也和sift算法中的类似,采用3维线性插值法得到亚像素级的特征点,同时也去掉那些值小于一定阈值的点。
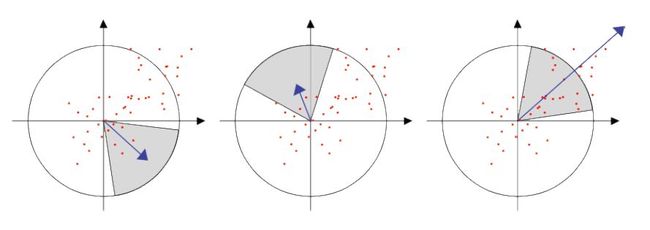
4. 选取特征点的主方向。
这一步与sift也大有不同。Sift选取特征点主方向是采用在特征点领域内统计其梯度直方图,取直方图bin值最大的以及超过最大bin值80%的那些方向做为特征点的主方向。而在surf中,不统计其梯度直方图,而是统计特征点领域内的harr小波特征。即在特征点的领域(比如说,半径为6s的圆内,s为该点所在的尺度)内,统计60度扇形内所有点的水平haar小波特征和垂直haar小波特征总和,haar小波的尺寸变长为4s,这样一个扇形得到了一个值。然后60度扇形以一定间隔进行旋转,最后将最大值那个扇形的方向作为该特征点的主方向。该过程的示意图如下:
5. 构造surf特征点描述算子
在sift中,是在特征点周围取16*16的邻域,并把该领域化为4*4个的小区域,每个小区域统计8个方向梯度,最后得到4*4*8=128维的向量,该向量作为该点的sift描述子。
在surf中,也是在特征点周围取一个正方形框,框的边长为20s(s是所检测到该特征点所在的尺度)。该框带方向,方向当然就是第4步检测出来的主方向了。然后把该框分为16个子区域,每个子区域统计25个像素的水平方向和垂直方向的haar小波特征,这里的水平和垂直方向都是相对主方向而言的。该haar小波特征为水平方向值之和,水平方向绝对值之和,垂直方向之和,垂直方向绝对值之和。该过程的示意图如下所示:
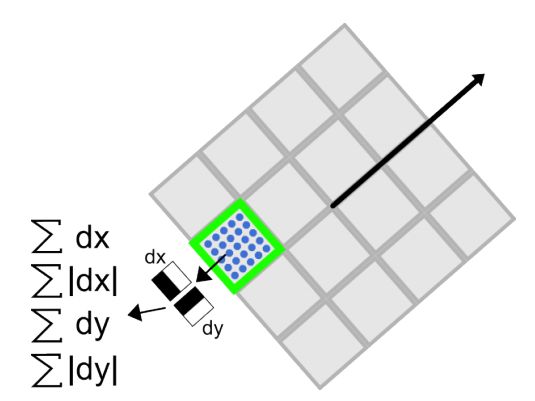
这样每个小区域就有4个值,所以每个特征点就是16*4=64维的向量,相比sift而言,少了一半,这在特征匹配过程中会大大加快匹配速度。
二、特征点的匹配过程
surf特征点的匹配过程和sift类似,这里不做详细介绍
三、实验部分
本次实验采用网上流行的open surf,用c++完成的,用到了opencv库,下载地址为:http://www.chrisevansdev.com/computer-vision-opensurf.html
该代码的作者给出的主函数实现了6中功能,包括静态图片特征点的检测,视频中特征点的检测,图片之间的匹配,视频与图片之间的匹配,特征点聚类等6中功能。本次实验就简单的测试了图片的检测,匹配和特征点聚类3个功能。并加入了简单的界面。
开发环境为:opencv2.4.2+Qt4.8.2+open surf+windosxp
实验分为下面3个部分来描述。
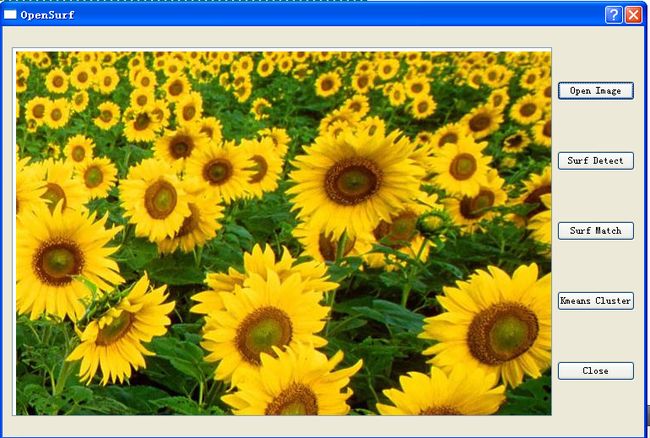
Surf特征点检测和描述
打开软件,单击Open Image按钮,选择一张待检测的图片,效果如下:
单击Surf Detect按钮,程序会对该图片进行特征点检测,并显示特征结果,包括特征点的主方向,尺度等信息。效果如下:

单击Close 按钮退出程序。
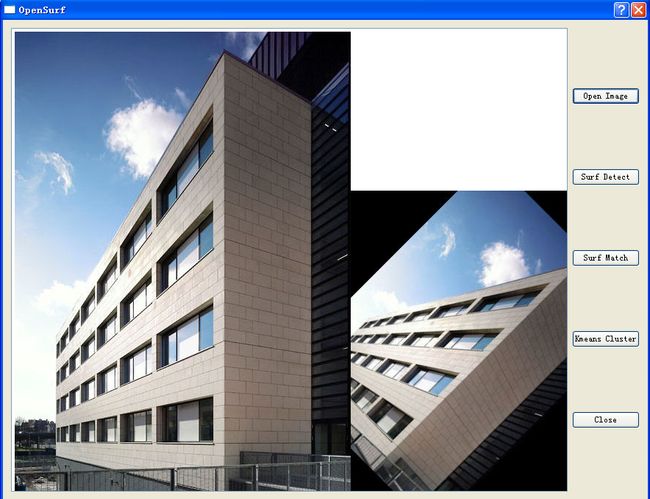
Surf特征点匹配
打开软件,单击Open Image 按钮,依次打开2幅待匹配的图片,这2幅图片要有相同的内容,只是尺度,旋转,光照等不同。打开图片后如下:
单击Surf Detect按钮,和上面类似,会先对图片进行检测,效果如下:

单击Surf Match 按钮,程序会对检测到的图片进行特征点匹配,效果如下:

单击Close 按钮退出程序。
Surf特征点聚类
打开软件,单击Open Image 按钮,选择一张待特征点分类的图片,如下所示:

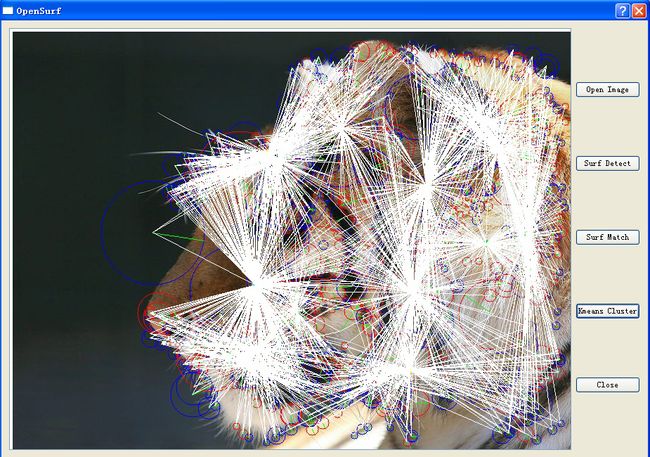
单击Surf Detect按钮,首先对该图片进行surf特征点检测,如下:

单击Kmeans Cluster按钮,程序会对这些特征点集合进行聚类,并显示其结果,如下所示:
单击Close 按钮退出程序。
实验主要函数部分及代码(附录有工程code下载链接):
opensurf.h:

#ifndef OPENSURF_H #define OPENSURF_H #include#include #include #include #include #include "ipoint.h" #include "kmeans.h" using namespace cv; namespace Ui { class OpenSurf; } class OpenSurf : public QDialog { Q_OBJECT public: explicit OpenSurf(QWidget *parent = 0); ~OpenSurf(); private slots: void on_openButton_clicked(); void on_detectButton_clicked(); void on_matchButton_clicked(); void on_closeButton_clicked(); void on_clusterButton_clicked(); private: Ui::OpenSurf *ui; IplImage *img1, *img2, *img_match1, *img_match2; IpVec ipts, ipts1, ipts2; IpPairVec matches; Kmeans km; int open_image_num; }; #endif // OPENSURF_H
opensurf.cpp:
#include "opensurf.h" #include "ui_opensurf.h" #include#include #include "surflib.h" using namespace std; OpenSurf::OpenSurf(QWidget *parent) : QDialog(parent), ui(new Ui::OpenSurf) { open_image_num = 0; ui->setupUi(this); } OpenSurf::~OpenSurf() { delete ui; } void OpenSurf::on_openButton_clicked() { QString img_name = QFileDialog::getOpenFileName(this, "Open Image", "../open_surf", tr("Image Files(*.png *.jpeg *.jpg *.bmp)")); if(0 == open_image_num) ui->textBrowser->clear(); open_image_num ++; if( 1 == open_image_num ) { img1 = cvLoadImage(img_name.toAscii().data()); img_match1 = cvLoadImage(img_name.toAscii().data()); cvSaveImage("../open_surf/load_img1.jpg", img1); ui->textBrowser->setFixedSize(img1->width, img1->height); ui->textBrowser->insertHtml(" "); } else if(2 == open_image_num) { img2 = cvLoadImage(img_name.toAscii().data()); img_match2 = cvLoadImage(img_name.toAscii().data()); cvSaveImage("../open_surf/load_img2.jpg", img2); ui->textBrowser->setFixedSize(img1->width+img2->width, std::max(img1->height, img2->height)); //取消自动换行模式,让2幅图片水平显示 ui->textBrowser->setWordWrapMode (QTextOption::NoWrap); ui->textBrowser->insertHtml("
"); } else if(3 == open_image_num) { open_image_num = 0; ui->textBrowser->clear(); } } void OpenSurf::on_detectButton_clicked() { if( 1 == open_image_num ) { //用surf对特征点进行检测 surfDetDes(img1, ipts, false, 5, 4, 2, 0.0004f); //在图像中将特征点画出来 drawIpoints(img1, ipts); cvSaveImage("../open_surf/detect_img1.jpg", img1); ui->textBrowser->clear(); ui->textBrowser->setFixedSize(img1->width, img1->height); ui->textBrowser->insertHtml("
"); } else if (2 == open_image_num) { //用surf对特征点进行检测 surfDetDes(img1, ipts1, false, 5, 4, 2, 0.0004f); //在图像中将特征点画出来 drawIpoints(img1, ipts1); cvSaveImage("../open_surf/detect_img1.jpg", img1); //用surf对特征点进行检测 surfDetDes(img2, ipts2, false, 5, 4, 2, 0.0004f); //在图像中将特征点画出来 drawIpoints(img2, ipts2); cvSaveImage("../open_surf/detect_img2.jpg", img2); ui->textBrowser->clear(); ui->textBrowser->insertHtml("
"); } } void OpenSurf::on_matchButton_clicked() { if(2 == open_image_num) { getMatches(ipts1,ipts2,matches); for (unsigned int i = 0; i < matches.size(); ++i) { drawPoint(img_match1,matches[i].first); drawPoint(img_match2,matches[i].second); const int & w = img1->width; const int & h1 = img1->height; const int & h2 = img2->height; //这里因为我事先已经知道了图片的相对打开后显示的位置,所以在画匹配的直线时加了点常识 //因此该方法不通用,只是适合本例中给的图片,最好的方法就像Rob Hess的sift算法那样 //把2张图片合成一张,然后在一张图片上画匹配直线 cvLine(img_match1,cvPoint(matches[i].first.x,matches[i].first.y), cvPoint(matches[i].second.x+w,matches[i].second.y+std::abs(h1-h2)), cvScalar(255,255,255),1); cvLine(img_match2,cvPoint(matches[i].first.x-w,matches[i].first.y-std::abs(h1-h2)), cvPoint(matches[i].second.x,matches[i].second.y), cvScalar(255,255,255),1); } cvSaveImage("../open_surf/match_img1.jpg", img_match1); cvSaveImage("../open_surf/match_img2.jpg", img_match2); ui->textBrowser->clear(); ui->textBrowser->insertHtml("
"); ui->textBrowser->setFixedSize(img1->width+img2->width, std::max(img1->height, img2->height)); //取消自动换行模式,让2幅图片水平显示 ui->textBrowser->setWordWrapMode (QTextOption::NoWrap); ui->textBrowser->insertHtml("
"); } } void OpenSurf::on_clusterButton_clicked() { for (int repeat = 0; repeat < 10; ++repeat) { km.Run(&ipts, 5, true); drawPoints(img1, km.clusters); for (unsigned int i = 0; i < ipts.size(); ++i) { cvLine(img1, cvPoint(ipts[i].x,ipts[i].y), cvPoint(km.clusters[ipts[i].clusterIndex].x ,km.clusters[ipts[i].clusterIndex].y),cvScalar(255,255,255)); } cvSaveImage("../open_surf/kmeans_img1.jpg", img1); ui->textBrowser->clear(); ui->textBrowser->setFixedSize(img1->width, img1->height); ui->textBrowser->insertHtml("
"); } } void OpenSurf::on_closeButton_clicked() { close(); }
总结:
Surf在速度上比sift要快许多,这主要得益于它的积分图技术,已经Hessian矩阵的利用减少了降采样过程,另外它得到的特征向量维数也比较少,有利于更快的进行特征点匹配。
附录一:
1、和RobHesson运行时一样,这里的open surf运行时出现如下错误:
ipoint.obj:-1: error: LNK2019: 无法解析的外部符号 _cvFindHomography,该符号在函数 "int __cdecl translateCorners(class std::vector
不过这次的原因是没有opencv_calib3d242d.lib库,因为本open surf在进行特征匹配时用到了opencv中的3维重建有关的函数cvFindHomography(该函数是求2个图像间的单应矩阵),所以很多人都会忘了添加这个库文件,就会导致这个错误。
2、如果用了Qt或MFC等界面设计代码时,编译该程序会报如下错误:
moc_open_surf.obj:-1: error: LNK2005: "public: void __thiscall Kmeans::SetIpoints(class std::vector
其实是Open Surf的作者可能没有考虑周全,它在kmeans.h文件中把Kmeans这个类的成员函数方法在头文件中实现了,其实这在标准c++中是不支持的。解决方法就是把kmeans.h改造成kemans.hpp(该方法我没有去试过);另外一种方法就是新建一个kmeans.cpp文件,把成员函数的实现过程放在cpp文件中实现,我这次试验就是采用的这个方法。
附录二:
实验工程code下载。