ROS之游戏手柄控制乌龟和机器人
导师买了个游戏手柄,就研究了一下怎么用游戏手柄控制机器人。想不到有点简单,编写一断代码即可,同时对我这两天学习的复习。
开始教程。
(1)游戏手柄控制乌龟。
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key/turtle1/cmd_vel[geometry_msgs/Twist]rosmsg show geometry_msgs/Twistgeometry_msgs/Vector3 linear
float64 x
float64 y
float64 z
geometry_msgs/Vector3 angular
float64 x
float64 y
float64 z
思路:我们知道乌龟会订阅上面这个话题,因此我们要写这样一个代码,有订阅器,发布器。订阅游戏手柄的指令,然后发布速度到/turtle1/cmd_vel话题上,这样乌龟就可以订阅了。
现在我们要了解游戏手柄的发送的数据类型,然后经过订阅处理,发送自己想要的速度。
首先在终端运行:
ls /dev/input/
sudo jstest /dev/input/js0
axes: 0: 0 1:0 2: 0...
buttons: 0: 0 1:0 2:0 3:0 4:0...接下来,我们运行接收游戏手柄数据的节点
rosrun joy joy_noderostopic echo /joy---
header:
seq: 837
stamp:
secs: 1500642610
nsecs: 656011953
frame_id: ''
axes: [-0.0, -0.0, 0.0, -0.0, -0.0, 0.0, 0.0, 0.0]
buttons: [0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0]
---
rostopic type /joysensor_msgs/Joy$rosmsg show sensor_msgs/Joystd_msgs/Header header
uint32 seq
time stamp
string frame_id
float32[] axes
int32[] buttons好,现在我也知道了/joy话题和其类型。我们开始编写代码:
#include
#include
#include
#include
using namespace std;
class Teleop
{
public:
Teleop();
private:
/* data */
void callback(const sensor_msgs::Joy::ConstPtr& Joy);
ros::NodeHandle n; //实例化节点
ros::Subscriber sub ;
ros::Publisher pub ;
double vlinear,vangular;//我们控制乌龟的速度,是通过这两个变量调整
int axis_ang,axis_lin; //axes[]的键
};
Teleop::Teleop()
{
//我们将这几个变量加上参数,可以在参数服务器方便修改
n.param("axis_linear",axis_lin,1); //默认axes[1]接收速度
n.param("axis_angular",axis_ang,0);//默认axes[0]接收角度
n.param("vel_linear",vlinear,1);//默认线速度1 m/s
n.param("vel_angular",vangular,1);//默认角速度1 单位rad/s
pub = n.advertise("/turtle1/cmd_vel",1);//将速度发给乌龟
sub = n.subscribe("joy",10,&Teleop::callback,this); //订阅游戏手柄发来的数据}
void Teleop::callback(const sensor_msgs::Joy::ConstPtr& Joy)
{
geometry_msgs::Twist v; v.linear.x =Joy->axes[axis_lin]*vlinear; //将游戏手柄的数据乘以你想要的速度,然后发给乌龟
v.angular.z =Joy->axes[axis_ang]*vangular;
ROS_INFO("linear:%.3lf angular:%.3lf",v.linear.x,v.angular.z);
pub.publish(v);
}
int main(int argc,char** argv)
{
ros::init(argc, argv, "logteleop");
Teleop telelog; ros::spin();
return 0;
}

摇杆1控制着axes[0]和axes[1],摇杆2控制着axes[3]axes[4]。所以在启动文件时候我可以随意设置是哪个摇杆,如果不设置就采取默认。这就是参数的好处。
(2)接下来,用游戏手柄控制机器人,我们先启动机和
roslaunch turtlebot_bringup minimal.launch
roslaunch turtlebot_teleop keyboard_teleop.launch
rosrun rqt_graph rqt_graph其中第一个是启动总机器人的节点,第二个是启动键盘控制机器人走的节点,第三个是查看他们的通信,如下图:
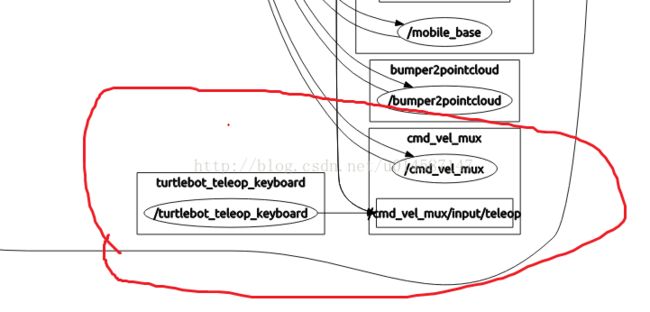
键盘发布的话题是
/cmd_vel_mux/input/teleop上代码:
#include
#include
#include
#include
using namespace std;
class Teleop
{
public:
Teleop();
private:
/* data */
void callback(const sensor_msgs::Joy::ConstPtr& Joy);
ros::NodeHandle n;
ros::Subscriber sub ;
ros::Publisher pub ;
double vlinear,vangular;
int axis_ang,axis_lin,ton;
};
Teleop::Teleop()
{
n.param("axis_linear",axis_lin,1);
n.param("axis_angular",axis_ang,0);
n.param("vel_linear",vlinear,1);
n.param("vel_angular",vangular,1);
n.param("button",ton,5);
pub = n.advertise("/cmd_vel_mux/input/teleop",1);
sub = n.subscribe("joy",10,&Teleop::callback,this);
}
void Teleop::callback(const sensor_msgs::Joy::ConstPtr& Joy)
{
geometry_msgs::Twist v;
//v.linear.x =Joy->axes[axis_lin]*vlinear;
// v.angular.z =Joy->axes[axis_ang]*vangular;
if(Joy->buttons[ton])
{
v.linear.x =(Joy->axes[axis_lin]+Joy->axes[1])*vlinear;
v.angular.z =(Joy->axes[axis_ang]+Joy->axes[0])*vangular;
ROS_INFO("linear:%.3lf angular:%.3lf",v.linear.x,v.angular.z);
pub.publish(v);
}
}
int main(int argc,char** argv)
{
ros::init(argc, argv, "log");
Teleop telelog;
ros::spin();
return 0;
} 执行的时候,我发现手误轻轻碰到摇杆机器人就会走,我不想这样,于是我又多加了键,buttons[5]按键,它会传过来0或1,当我按着的时候会是1。这样,当且仅当我按着这个按钮的时候,并且移动摇杆,机器人才会走。至于按哪个键,我可以设置参数,默认是buttons[5]。
v.linear.x =(Joy->axes[axis_lin]+Joy->axes[1])*vlinear;
v.angular.z =(Joy->axes[axis_ang]+Joy->axes[0])*vangular;突然发现,我也挺聪明的。
附上launch文件
最后通过图,看下订阅关系

有没有发现,节点名都变了?哈哈,通过launch文件可以重映射哦