Opencv图像插值算法与其应用(图像伸缩)
DataWhale 机器视觉组队学习task1
1.1 简介
在图像处理中,平移变换、旋转变换以及放缩变换是一些基础且常用的操作。这些几何变换并不改变图象的象素值,只是在图象平面上进行象素的重新排列。在一幅输入图象 [ u , v ] [u,v] [u,v]中,灰度值仅在整数位置上有定义。然而,输出图象[x,y]的灰度值一般由处在非整数坐标上的 ( u , v ) (u,v) (u,v)值来决定。这就需要插值算法来进行处理,常见的插值算法有最近邻插值、双线性插值和三次样条插值。
1.2 算法理论介绍与推荐
1.2.1 最近邻插值算法原理
最近邻插值,是指将目标图像中的点,对应到源图像中后,找到 最 相 邻 的 整 数 点 \color{#FF0000}{最相邻的整数点} 最相邻的整数点,作为插值后的输出。

如上图所示,目标图像中的某点投影到原图像中的位置为点P,此时易知, f ( P ) = f ( Q 11 ) f(P) = f(Q11) f(P)=f(Q11).
一个例子:
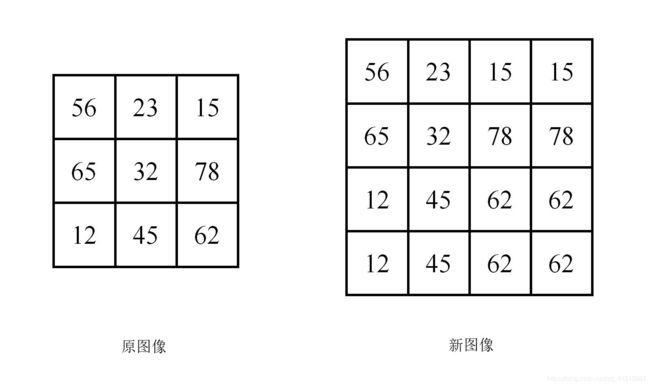
如下图所示,将一幅3X3的图像放大到4X4,用 f ( x , y ) f(x, y) f(x,y)表示目标图像, h ( x , y ) h(x, y) h(x,y)表示原图像,我们有如下公式:
f ( d s t X , d s t Y ) = h ( d s t X s r c W i d t h d s t W i d t h , d s t Y s r c H e i g h t d s t H e i g h t ) \begin{array}{c} f(dst_{X}, dst_{Y}) = h(\frac{dst_{X}src_{Width}} {dst_{Width}}, \frac{dst_{Y}src_{Height}} {dst_{Height}}) \end{array} f(dstX,dstY)=h(dstWidthdstXsrcWidth,dstHeightdstYsrcHeight)
f ( 0 , 0 ) = h ( 0 , 0 ) f ( 0 , 1 ) = h ( 0 , 0.75 ) = h ( 0 , 1 ) f ( 0 , 2 ) = h ( 0 , 1.50 ) = h ( 0 , 2 ) f ( 0 , 3 ) = h ( 0 , 2.25 ) = h ( 0 , 2 ) . . . \begin{array}{c} f(0,0)=h(0,0) \\ f(0,1)=h(0,0.75)=h(0,1) \\ f(0,2)=h(0,1.50)=h(0,2) \\ f(0,3)=h(0,2.25)=h(0,2) \\ ...\\ \end{array} f(0,0)=h(0,0)f(0,1)=h(0,0.75)=h(0,1)f(0,2)=h(0,1.50)=h(0,2)f(0,3)=h(0,2.25)=h(0,2)...

注 意 : 小 数 部 分 遵 循 四 舍 五 入 ! 比 如 h ( 0 , 1.50 ) = h ( 0 , 2 ) ( 也 可 以 采 用 直 接 舍 掉 小 数 位 的 方 法 ) \color{#FF0000}{注意:小数部分遵循四舍五入!比如h(0, 1.50)=h(0,2)(也可以采用直接舍掉小数位的方法)} 注意:小数部分遵循四舍五入!比如h(0,1.50)=h(0,2)(也可以采用直接舍掉小数位的方法)
另外缩小也是相同的公式,由高等数学知识知:单调函数必有反函数。因为该函数为单调不减函数,所以推理可知最近邻法放大n倍再缩小为原来1/n还是原图,下面用代码验证一下:
import cv2
import numpy as np
arr = np.random.randint(255, size=(500, 500), dtype=np.uint8)
amplifier = cv2.resize(arr, dsize=None, fx=2, fy=2, interpolation = cv2.INTER_NEAREST)
minimise = cv2.resize(amplifier, dsize=None, fx=0.5, fy=0.5, interpolation = cv2.INTER_NEAREST)
print((minimise == arr).sum())
输出为250000,刚好为500*500,所以可以证明我们的推理
缺点:
用该方法作放大处理时,在图象中可能出现明显的块状效应

1.2.2 双线性插值
在讲双线性插值之前先看以一下线性插值,线性插值多项式为:
f ( x ) = a 1 x + a 0 f(x)=a_{1} x+a_{0} f(x)=a1x+a0

y = y 0 + ( x − x 0 ) y 1 − y 0 x 1 − x 0 = y 0 + ( x − x 0 ) y 1 − ( x − x 0 ) y 0 x 1 − x 0 y=y_{0}+\left(x-x_{0}\right) \frac{y_{1}-y_{0}}{x_{1}-x_{0}}=y_{0}+\frac{\left(x-x_{0}\right) y_{1}-\left(x-x_{0}\right) y_{0}}{x_{1}-x_{0}} y=y0+(x−x0)x1−x0y1−y0=y0+x1−x0(x−x0)y1−(x−x0)y0
双线性插值
如图,已知 Q 12 , Q 22 , Q 11 , Q 21 Q_{12},Q_{22},Q_{11},Q_{21} Q12,Q22,Q11,Q21,但是要插值的点为 P P P点,这就要用双线性插值了,首先在 x x x轴方向上,对 R 1 R_1 R1和 R 2 R_2 R2两个点进行插值,这个很简单,然后根据 R 1 R_1 R1和 R 2 R_2 R2对 P P P点进行插值,这就是所谓的双线性插值。在数学上,双线性插值是有两个变量的插值函数的线性插值扩展,其核心思想是在两个方向分别进行一次线性插值。
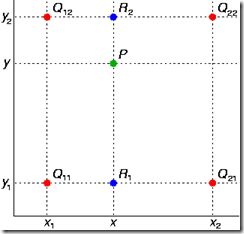
设 Q 11 = ( x 1 , y 1 ) 、 Q 12 = ( x 1 , y 2 ) , Q 21 = ( x 2 , y 1 ) 以 及 Q 22 = ( x 2 , y 2 ) Q_{11} = (x_1, y_1)、Q_{12} = (x_1, y_2), Q_{21} = (x_2, y_1) 以及 Q_{22} = (x_2, y_2) Q11=(x1,y1)、Q12=(x1,y2),Q21=(x2,y1)以及Q22=(x2,y2)
首先在 x x x方向进行线性插值,得到
f ( R 1 ) ≈ x − x 2 x 1 − x 2 f ( Q 11 ) + x − x 1 x 2 − x 1 f ( Q 21 ) f(R_1)\approx \frac{x-x_2}{x_1-x_2}f(Q_{11})+\frac{x-x_1}{x_2-x_1}f(Q_{21}) f(R1)≈x1−x2x−x2f(Q11)+x2−x1x−x1f(Q21)
f ( R 2 ) ≈ x − x 2 x 1 − x 2 f ( Q 12 ) + x − x 1 x 2 − x 1 f ( Q 22 ) f(R_2)\approx \frac{x-x_2}{x_1-x_2}f(Q_{12})+\frac{x-x_1}{x_2-x_1}f(Q_{22}) f(R2)≈x1−x2x−x2f(Q12)+x2−x1x−x1f(Q22)
然后在 y y y方向进行线性插值,得到:
f ( P ) ≈ y − y 2 y 1 − y 2 f ( R 1 ) + y − y 1 y 2 − y 1 R 2 f(P)\approx \frac{y-y_2}{y_1-y_2}f(R_1)+\frac{y-y_1}{y_2-y_1}R_{2} f(P)≈y1−y2y−y2f(R1)+y2−y1y−y1R2
将 f ( R 1 ) 、 f ( R 2 ) 带 入 上 式 得 : \color{#FF0000}{将f(R_1)、f(R_2)带入上式得:} 将f(R1)、f(R2)带入上式得:
f ( P ) ≈ y − y 2 y 1 − y 2 x − x 2 x 1 − x 2 f ( Q 11 ) + y − y 2 y 1 − y 2 x − x 1 x 2 − x 1 f ( Q 21 ) + y − y 1 y 2 − y 1 x − x 2 x 1 − x 2 f ( Q 12 ) + y − y 1 y 2 − y 1 x − x 1 x 2 − x 1 f ( Q 22 ) f(P)\approx \frac{y-y_2}{y_1-y_2} \frac{x-x_2}{x_1-x_2}f(Q_{11}) + \frac{y-y_2}{y_1-y_2}\frac{x-x_1}{x_2-x_1}f(Q_{21}) +\frac{y-y_1}{y_2-y_1}\frac{x-x_2}{x_1-x_2}f(Q_{12})+\frac{y-y_1}{y_2-y_1}\frac{x-x_1}{x_2-x_1}f(Q_{22}) f(P)≈y1−y2y−y2x1−x2x−x2f(Q11)+y1−y2y−y2x2−x1x−x1f(Q21)+y2−y1y−y1x1−x2x−x2f(Q12)+y2−y1y−y1x2−x1x−x1f(Q22)
这就是双线性插值最后的结果,由于图像双线性插值只会用相邻的4个点,因此上述公式的分母都是1,图像双线性插值原理如下:

令 f ( x , y ) f(x,y) f(x,y)为两个变量的函数,其在单位正方形顶点的值已知。假设我们希望通过插值得到正方形内任意点的函数值。则可由双线性方程:
f ( x , y ) = a x + b y + c x y + d f(x, y)=a x+b y+c x y+d f(x,y)=ax+by+cxy+d
来定义的一个双曲抛物面与四个已知点拟合。
首先对上端的两个顶点进行线性插值得:
f ( x , 0 ) = f ( 0 , 0 ) + x [ f ( 1 , 0 ) − f ( 0 , 0 ) ] f(x, 0)=f(0,0)+x[f(1,0)-f(0,0)] f(x,0)=f(0,0)+x[f(1,0)−f(0,0)]
类似地,再对底端的两个顶点进行线性插值有:
f ( x , 1 ) = f ( 0 , 1 ) + x [ f ( 1 , 1 ) − f ( 0 , 1 ) ] f(x, 1)=f(0,1)+x[f(1,1)-f(0,1)] f(x,1)=f(0,1)+x[f(1,1)−f(0,1)]
最后,做垂直方向的线性插值,以确定:
f ( x , y ) = f ( x , 0 ) + y [ f ( x , 1 ) − f ( x , 0 ) ] f(x, y)=f(x, 0)+y[f(x, 1)-f(x, 0)] f(x,y)=f(x,0)+y[f(x,1)−f(x,0)]
整理得:
f ( x , y ) = [ f ( 1 , 0 ) − f ( 0 , 0 ) ] x + [ f ( 0 , 1 ) − f ( 0 , 0 ) ] y + [ f ( 1 , 1 ) + f ( 0 , 0 ) − f ( 0 , 1 ) − f ( 1 , 0 ) ] x y + f ( 0 , 0 ) \color{#FF0000}{\begin{array}{l} f(x, y)=[f(1,0)-f(0,0)] x+[f(0,1)-f(0,0)] y \\ +[f(1,1)+f(0,0)-f(0,1)-f(1,0)] x y+f(0,0) \end{array}} f(x,y)=[f(1,0)−f(0,0)]x+[f(0,1)−f(0,0)]y+[f(1,1)+f(0,0)−f(0,1)−f(1,0)]xy+f(0,0)
用一开始的例子算一下:
f ( 0 , 0 ) = h ( 0 , 0 ) = 56 f ( 0 , 1 ) = h ( 0 , 0.75 ) = 0.75 ⋅ ( 23 − 56 ) + 56 = 31.25 f ( 0 , 2 ) = h ( 0 , 1.50 ) = 0.5 ⋅ ( 15 − 23 ) + 23 = 19 f ( 0 , 3 ) = h ( 0 , 2.25 ) = 0.25 ⋅ ? ? ? . . . \begin{array}{c} f(0,0)=h(0,0) =56\\ f(0,1)=h(0,0.75)=0.75\cdot(23-56) +56=31.25\\ f(0,2)=h(0,1.50)=0.5\cdot(15-23) + 23=19 \\ f(0,3)=h(0,2.25)=0.25\cdot??? \\ ...\\ \end{array} f(0,0)=h(0,0)=56f(0,1)=h(0,0.75)=0.75⋅(23−56)+56=31.25f(0,2)=h(0,1.50)=0.5⋅(15−23)+23=19f(0,3)=h(0,2.25)=0.25⋅???...
???可以看到,算到 f ( 0 , 3 ) f(0,3) f(0,3)的时候不知道怎么带入公式了,并且我们用代码验证一下:
arr = np.array([[56, 23, 15], [65, 32, 78], [12, 45, 62]], dtype=np.uint8)
amplifier = cv2.resize(arr, dsize=None, fx=4/3, fy=4/3, interpolation = cv2.INTER_LINEAR)
print(amplifier)
输出:
[[56 35 20 15]
[62 41 38 54]
[45 40 50 72]
[12 33 51 62]]
可以看到,和我们手算的结果并不一样,这是为什么呢??
看了这篇博客后才知道里面的原理
其实就是将源图像和目标图像几何中心的对齐 ,把一开始的公式:
f ( d s t X , d s t Y ) = h ( d s t X s r c W i d t h d s t W i d t h , d s t Y s r c H e i g h t d s t H e i g h t ) f(dst_{X}, dst_{Y}) = h(\frac{dst_{X}src_{Width}} {dst_{Width}}, \frac{dst_{Y}src_{Height}} {dst_{Height}}) f(dstX,dstY)=h(dstWidthdstXsrcWidth,dstHeightdstYsrcHeight)
改为:
f ( d s t X , d s t Y ) = h [ ( d s t X + 0.5 ) ∗ s r c W i d t h d s t W i d t h − 0.5 , ( d s t Y + 0.5 ) ∗ s r c H e i g h t d s t H e i g h t − 0.5 ] \color{#FF0000}{f(dst_{X}, dst_{Y}) = h[\frac{(dst_{X}+0.5)*src_{Width} } {dst_{Width}}- 0.5, \frac{(dst_{Y}+0.5)*src_{Height}} {dst_{Height}}-0.5]} f(dstX,dstY)=h[dstWidth(dstX+0.5)∗srcWidth−0.5,dstHeight(dstY+0.5)∗srcHeight−0.5]
另外,遇到边界时

参照这个评论处理,接下来我们重新手算一遍:
f ( 0 , 0 ) = h ( − 0.125 , − 0.125 ) = h ( 0 , 0 ) = 56 f ( 0 , 1 ) = h ( − 0.125 , 0.625 ) = h ( 0 , 0.625 ) = 0.625 ⋅ ( 23 − 56 ) + 56 = 35.375 ≈ 35 f ( 0 , 2 ) = h ( − 0.125 , 1.375 ) = h ( 0 , 1.375 ) = 0.375 ⋅ ( 15 − 23 ) + 23 = 20 f ( 0 , 3 ) = h ( − 0.125 , 2.125 ) = h ( 0 , 2 ) = 15 f ( 1 , 0 ) = h ( 0.625 , − 0.125 ) = h ( 0.625 , 0 ) = 0.625 ⋅ ( 65 − 56 ) + 56 = 61.625 ≈ 62 f ( 1 , 1 ) = h ( 0.625 , 0.625 ) = h ( 0.625 , 0.625 ) = 0.625 ⋅ ( 65 − 56 ) + 0.625 ⋅ ( 23 − 56 ) + 0.625 ⋅ 0.625 ⋅ ( 56 + 32 − 65 − 23 ) + 56 = 41 . . . \begin{array}{c} f(0,0) =h(-0.125,-0.125) =h(0,0)=56\\ f(0,1)=h(-0.125,0.625)=h(0,0.625)=0.625\cdot(23-56) +56=35.375\approx 35\\ f(0,2)=h(-0.125,1.375)=h(0,1.375)=0.375\cdot(15-23) + 23=20 \\ f(0,3)=h(-0.125,2.125)=h(0, 2)=15 \\ f(1,0)=h(0.625,-0.125)=h(0.625,0)=0.625\cdot(65-56) +56=61.625\approx 62\\ f(1,1)=h(0.625,0.625)=h(0.625,0.625)\\ =0.625\cdot(65-56) +0.625\cdot (23-56) + 0.625 \cdot 0.625 \cdot(56+32-65-23)+56\\ =41\\ ...\\ \end{array} f(0,0)=h(−0.125,−0.125)=h(0,0)=56f(0,1)=h(−0.125,0.625)=h(0,0.625)=0.625⋅(23−56)+56=35.375≈35f(0,2)=h(−0.125,1.375)=h(0,1.375)=0.375⋅(15−23)+23=20f(0,3)=h(−0.125,2.125)=h(0,2)=15f(1,0)=h(0.625,−0.125)=h(0.625,0)=0.625⋅(65−56)+56=61.625≈62f(1,1)=h(0.625,0.625)=h(0.625,0.625)=0.625⋅(65−56)+0.625⋅(23−56)+0.625⋅0.625⋅(56+32−65−23)+56=41...
可以看到和Opencv输出结果一样啦,hhhhhhh
另外,线性插值其实就是拉格朗日插值有两个取值点的情况
可以参考这篇文章理解一下:
https://www.zhihu.com/question/58333118
1.2.3 三次样条插值
为什么会有三次样条插值呢?
之前数值分析课做过实验:
当n=5和n=20时,拉格朗日插值逼近(蓝色为原函数,橙色为拉格朗日插值):
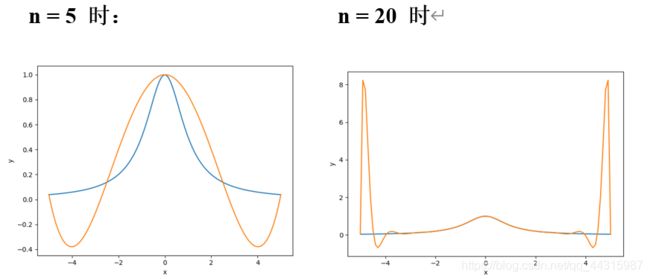
可以明显看出,随着n增大,拉格朗日插值会出现振荡现象,反观三弯角法(三次样条的一种):
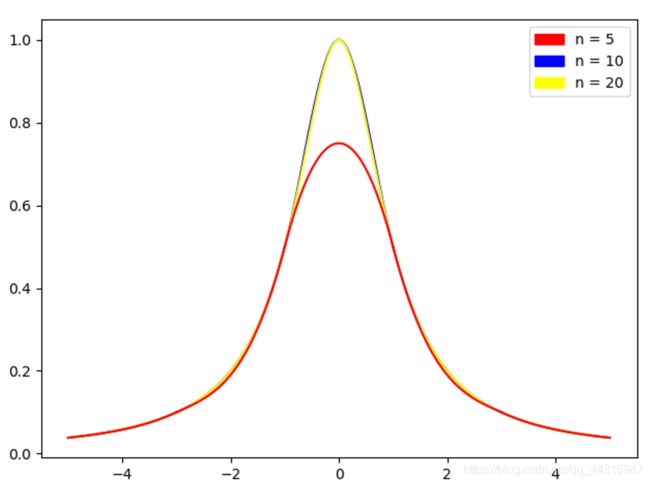
可 以 看 到 n 越 大 逼 近 效 果 越 好 \color{#FF0000}{可以看到n越大逼近效果越好} 可以看到n越大逼近效果越好,但是缺点就是算的太慢
三次样条插值原理
给定 n + 1 n+1 n+1个点, a = x 0 < x 1 < . . . < x n = b a=x_{0}
S i ( x ) = a i + b i ( x − x i ) + c i ( x − x i ) 2 + d i ( x − x i ) 3 , i = 0 , 1 , . . . n − 1 S_{i}(x)=a_{i}+b_{i}(x-x_{i})+c_{i}(x-x_{i})^2+d_{i}(x-x_{i})^3,i=0,1,...n-1 Si(x)=ai+bi(x−xi)+ci(x−xi)2+di(x−xi)3,i=0,1,...n−1
每个三次多项式中有四个未知参数,有 n n n个区间, n n n个多项式,共 4 n 4n 4n个未知参数。我们知道“ n n n个未知数需要 n n n个已知条件确定唯一解”,所以要确定这 4 n 4n 4n个未知参数,共需要 4 n 4n 4n个已知条件。
每个三次多项式满足如下条件:
- S i S_{i} Si二阶可导,且 S i S_{i} Si, S i ′ S_{i}^{'} Si′, S i ′ ′ S_{i}^{''} Si′′在区间 [ a , b ] [a,b] [a,b]内连续
- S i ( x i ) = y i S_{i}(x_{i})=y_{i} Si(xi)=yi, S i ( x i + 1 ) = y i + 1 S_{i}(x_{i+1})=y_{i+1} Si(xi+1)=yi+1, i = 0 , 1 , . . . n − 1 i=0,1,...n-1 i=0,1,...n−1(共 n + 1 n+1 n+1个条件)
- S i ( x i + 1 ) = S i + 1 ( x i + 1 ) S_{i}(x_{i+1})=S_{i+1}(x_{i+1}) Si(xi+1)=Si+1(xi+1), i = 0 , 1 , . . . n − 2 i=0,1,...n-2 i=0,1,...n−2(共 n − 1 n-1 n−1个条件)
- S i ′ ( x i + 1 ) = S i + 1 ′ ( x i + 1 ) S_{i}^{'}(x_{i+1})=S_{i+1}^{'}(x_{i+1}) Si′(xi+1)=Si+1′(xi+1), i = 0 , 1 , . . . n − 2 i=0,1,...n-2 i=0,1,...n−2(共 n − 1 n-1 n−1个条件)
- S i ′ ′ ( x i + 1 ) = S i + 1 ′ ′ ( x i + 1 ) S_{i}^{''}(x_{i+1})=S_{i+1}^{''}(x_{i+1}) Si′′(xi+1)=Si+1′′(xi+1), i = 0 , 1 , . . . n − 2 i=0,1,...n-2 i=0,1,...n−2(共 n − 1 n-1 n−1个条件)
以上共 4 n − 2 4n-2 4n−2个条件,还差2个条件,由如下三种边界条件确定:
-
给定端点处一阶导数值: S 0 ′ ( x 0 ) = y 0 ′ , S n − 1 ′ ( x n ) = y n ′ S_{0}^{'}(x_{0})=y_{0}^{'},S_{n-1}^{'}(x_{n})=y_{n}^{'} S0′(x0)=y0′,Sn−1′(xn)=yn′,称为固定边界条件
-
给定端点处二阶导数值: S 0 ′ ′ ( x 0 ) = y 0 ′ ′ , S n − 1 ′ ′ ( x n ) = y n ′ ′ S_{0}^{''}(x_{0})=y_{0}^{''},S_{n-1}^{''}(x_{n})=y_{n}^{''} S0′′(x0)=y0′′,Sn−1′′(xn)=yn′′,特别地, y 0 ′ ′ = y n ′ ′ = 0 y_{0}^{''}=y_{n}^{''}=0 y0′′=yn′′=0,称为自然边界条件
-
周期性条件: S 0 ( x 0 − 0 ) = S n − 1 ( x n + 0 ) S_{0}(x_{0}-0)=S_{n-1}(x_{n}+0) S0(x0−0)=Sn−1(xn+0), S 0 ′ ( x 0 − 0 ) = S n − 1 ′ ( x n + 0 ) S_{0}^{'}(x_{0}-0)=S_{n-1}^{'}(x_{n}+0) S0′(x0−0)=Sn−1′(xn+0),
S 0 ′ ′ ( x 0 − 0 ) = S n − 1 ′ ′ ( x n + 0 ) S_{0}^{''}(x_{0}-0)=S_{n-1}^{''}(x_{n}+0) S0′′(x0−0)=Sn−1′′(xn+0)
4 n 4n 4n个条件有了,就可以确定每个区间上的三次多项式。
对于每个区间内的点,就可以用 S i ( x ) S_{i}(x) Si(x)得到插值结果。三次样条插值具有良好的收敛性,稳定性和光滑性,优点明显,是非常重要的插值工具。
这里主要了解三次样条插值的作用,具体的推导过程比较繁琐,想了解的可以查阅资料。
流程图如下:
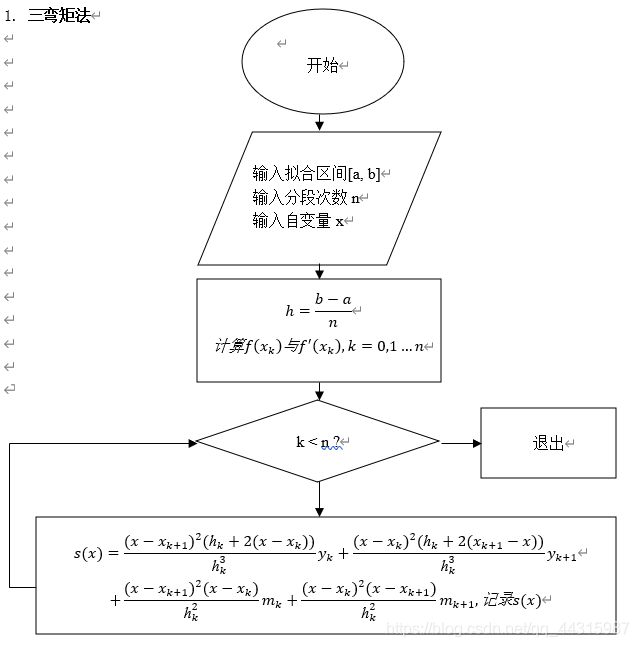
三次样条图像插值原理https://www.sohu.com/a/323023965_468740:
该方法利用三次多项式S(x)求逼近理论上最佳插值函数sin(x)/x, 其数学表达式为:
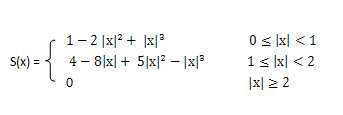
待求像素(x, y)的灰度值由其周围16个灰度值加权内插得到,如下图:
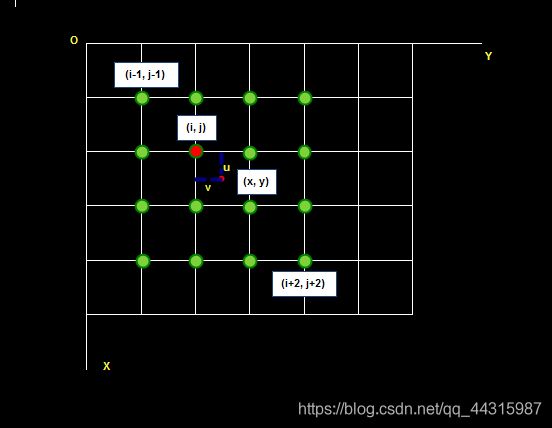
待求像素的灰度计算式如下:
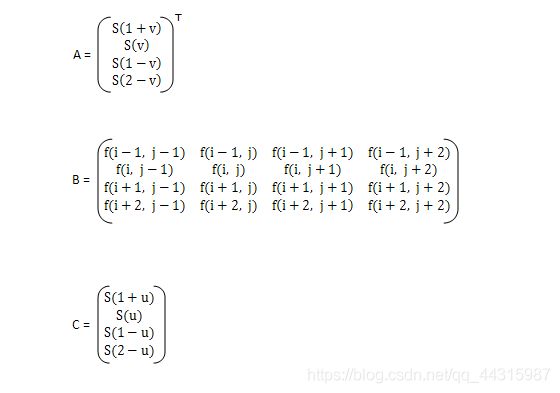
f ( x , y ) = f ( i + u , j + v ) = A B C f(x, y) = f(i+u, j+v) = ABC f(x,y)=f(i+u,j+v)=ABC
其中:
1.2.4 映射方法
假 设 变 换 前 图 像 为 I ( x , y ) , 变 换 后 图 像 为 I ′ ( x ′ , y ′ ) , 则 变 换 前 后 的 图 像 之 间 存 在 下 列 关 系 : \color{#FF0000}{假设变换前图像为I(x,y),变换后图像为I'(x',y'),则变换前后的图像之间存在下列关系:} 假设变换前图像为I(x,y),变换后图像为I′(x′,y′),则变换前后的图像之间存在下列关系:
( x ′ y ′ ) = ( f ( x , y ) g ( x , y ) ) ( 1 ) \left( \begin{matrix} x' \\ y' \end{matrix} \right)=\left( \begin{matrix} f(x, y) \\ g(x,y) \end{matrix} \right) \qquad \qquad \qquad (1) (x′y′)=(f(x,y)g(x,y))(1)
I ( x , y ) = I ′ ( x ′ , y ′ ) = I ′ ( f ( x , y ) , g ( x , y ) ) I(x,y)=I'(x',y')=I'(f(x,y),g(x,y)) I(x,y)=I′(x′,y′)=I′(f(x,y),g(x,y))
( x y ) = ( f − 1 ( x ′ , y ′ ) g − 1 ( x ′ , y ′ ) ) ( 2 ) \left( \begin{matrix} x \\ y \end{matrix} \right)=\left( \begin{matrix} f^{-1}(x', y') \\ g^{-1}(x',y') \end{matrix} \right) \qquad \qquad \qquad (2) (xy)=(f−1(x′,y′)g−1(x′,y′))(2)
I ′ ( x ′ , y ′ ) = I ′ ( x ′ , y ′ ) = I ′ ( f − 1 ( x ′ , y ′ ) , g − 1 ( x ′ , y ′ ) ) I'(x',y')=I'(x',y')=I'(f^{-1}(x',y'),g^{-1}(x',y')) I′(x′,y′)=I′(x′,y′)=I′(f−1(x′,y′),g−1(x′,y′))
向前映射法
可以将几何运算想象成一次一个象素地转移到输出图象中。如果一个输入象素被映射到四个输出象素之间的位置,则其灰度值就按插值算法在4个输出象素之间进行分配。称为向前映射法,或象素移交影射。
注:从原图象坐标计算出目标图象坐标镜像、平移变换使用这种计算方法
由公式(1)我们已知原图像到目标图像的坐标变换 ( f ( x , y ) , g ( x , y ) ) (f(x,y),g(x,y)) (f(x,y),g(x,y)),因此我们可以知道原图像的一点在变换后在目标图像的位置,我们称为向前映射。
向后映射法
向后映射法(或象素填充算法)是输出象素一次一个地映射回到输入象素中,以便确定其灰度级。如果一个输出象素被映射到4个输入象素之间,则其灰度值插值决定,向后空间变换是向前变换的逆。
注:从结果图象的坐标计算原图象的坐标
公式(2)中我们知道目标图像的一点(x’,y’)在变换前在原图像上的位置 ( f − 1 ( x ′ , y ′ ) , g − 1 ( x ′ , y ′ ) ) (f−1(x′,y′),g−1(x′,y′)) (f−1(x′,y′),g−1(x′,y′)),我们称为向后映射。
总结
- 旋转、拉伸、放缩可以使用
- 解决了漏点的问题,出现了马赛克
向后映射比较直观,计算量也小,我们经常使用的图像变换都是采用向后映射的方法来处理。但向后映射需要知道变换的反函数。但在有些变换比较复杂的场合,这个反变换是很难得到的。此时就需要采用前向映射的方法进行变换了。
1.3 基于OpenCV的实现
1.3.1 C++ 伸缩操作
函数原型:
void cv::resize(InputArray src, OutputArray dst, Size dsize, double fx=0, double fy=0, int interpolation=INTER_LINEAR )
src:输入图像
dst:输出图像
dsize:输出图像尺寸
fx、fy:x,y方向上的缩放因子
INTER_LINEAR:插值方法,总共五种
1. INTER_NEAREST - 最近邻插值法
2. INTER_LINEAR - 双线性插值法(默认)
3. INTER_AREA - 基于局部像素的重采样(resampling using pixel area relation)。对于图像抽取(image decimation)来说,这可能是一个更好的方法。但如果是放大图像时,它和最近邻法的效果类似。
4. INTER_CUBIC - 基于4x4像素邻域的3次插值法
5. INTER_LANCZOS4 - 基于8x8像素邻域的Lanczos插值
代码实践:
#include 原图
0.2倍缩小,双线性插值

1.5倍放大,最近邻插值

1.5倍放大,双线性插值

仔细观察可以看出,最邻近法有块状效应,而双线性插值法效果较好
1.3.2 Python
函数原型:
cv2.resize(src, dsize[, dst[, fx[, fy[, interpolation]]]])
参数:
| 参数 | 描述 |
|---|---|
| src | 【必需】原图像 |
| dsize | 【必需】输出图像所需大小 |
| fx | 【可选】沿水平轴的比例因子 |
| fy | 【可选】沿垂直轴的比例因子 |
| interpolation | 【可选】插值方式 |
插值方式:
| cv.INTER_NEAREST | 最近邻插值 |
| cv.INTER_LINEAR | 双线性插值 |
| cv.INTER_CUBIC | 基于4x4像素邻域的3次插值法 |
| cv.INTER_AREA | 基于局部像素的重采样 |
通常,缩小使用cv.INTER_AREA,放缩使用cv.INTER_CUBIC(较慢)和cv.INTER_LINEAR(较快效果也不错)。默认情况下,所有的放缩都使用cv.INTER_LINEAR。
代码实践:
下面介绍一些python opencv的基本函数的参数
1.imread(filename, flags=None)
| flags | 解释 |
|---|---|
| IMREAD_UNCHANGED | 指定用图片的原来格式打开,即以不改变图片的方式打开,图片是彩色就是彩色,图片是灰度图像就是灰度图像 |
| IMREAD_GRAYSCALE | 指定用灰度图像的方式打开图片,即将原始图像转化为灰度图像再打开 |
| IMREAD_COLOR | 指定用彩色图像打开图片 |
import cv2
if __name__ == "__main__":
img = cv2.imread('D:/image/yuner.jpg', cv2.IMREAD_UNCHANGED)
print('Original Dimensions : ',img.shape)
scale_percent = 30 # percent of original size
width = int(img.shape[1] * scale_percent / 100)
height = int(img.shape[0] * scale_percent / 100)
dim = (width, height)
# resize image
resized = cv2.resize(img, dim, interpolation = cv2.INTER_LINEAR)
fx = 1.5
fy = 1.5
resized1 = cv2.resize(resized, dsize=None, fx=fx, fy=fy, interpolation = cv2.INTER_NEAREST)
resized2 = cv2.resize(resized, dsize=None, fx=fx, fy=fy, interpolation = cv2.INTER_LINEAR)
print('Resized Dimensions : ',resized.shape)
cv2.imshow("Resized image", resized)
cv2.imshow("INTER_NEAREST image", resized1)
cv2.imshow("INTER_LINEAR image", resized2)
cv2.waitKey(0)
cv2.destroyAllWindows()
0.3倍缩小,双线性插值

1.5倍放大,最近邻插值

1.5倍放大,双线性插值

- 推荐书籍:学习OpenCV中文版
- 推荐博客:https://blog.csdn.net/hongbin_xu/category_6936122.html
1.6 总结
插值算法是很多几何变换的基础和前置条件,对插值算法细节的掌握有助于对其他算法的理解,为自己的学习打下坚实的基础。
关于Datawhale:
Datawhale是一个专注于数据科学与AI领域的开源组织,汇集了众多领域院校和知名企业的优秀学习者,聚合了一群有开源精神和探索精神的团队成员。Datawhale以“for the learner,和学习者一起成长”为愿景,鼓励真实地展现自我、开放包容、互信互助、敢于试错和勇于担当。同时Datawhale 用开源的理念去探索开源内容、开源学习和开源方案,赋能人才培养,助力人才成长,建立起人与人,人与知识,人与企业和人与未来的联结。